







1. 单个摄像头标定过程
在网上参考了一些大神的博客,发现有些地方并没有讲的很详细,我等小白水平看不懂啊,现将自己的过程详细记录下来,造福后面的小白们。
MATLAB版本:2014b
主机系统:window7 64
工具箱下载地址:http://www.vision.caltech.edu/bouguetj/calib_doc/
里面附有下载地址。
这是上面标定箱的第一个例子,假如你英文好的话,可以直接略过我这篇文章看英文的效果应该更好。
http://www.vision.caltech.edu/bouguetj/calib_doc/htmls/example.html
警告:采集图片的时候棋盘图千万不能动,此时从左右摄像头各采集一副图片,分为命名为left x与right x,然后再改变棋盘图位置,然后棋盘图又保存不动,再从左右摄像头各采集一副图片,命名为left y与right y,要不然后面你会后悔的,反正我是后悔了。
淘宝上买的一个双目摄像头,实际物比较小,
,先把解压的TOOLBOX_calib文件夹放到D:\MATLAB\R2014b\toolbox路径下(这是我的安装路径,然后打开MATLAB,选择工具箱路径,如图:

选择,添加并包含子文件夹;
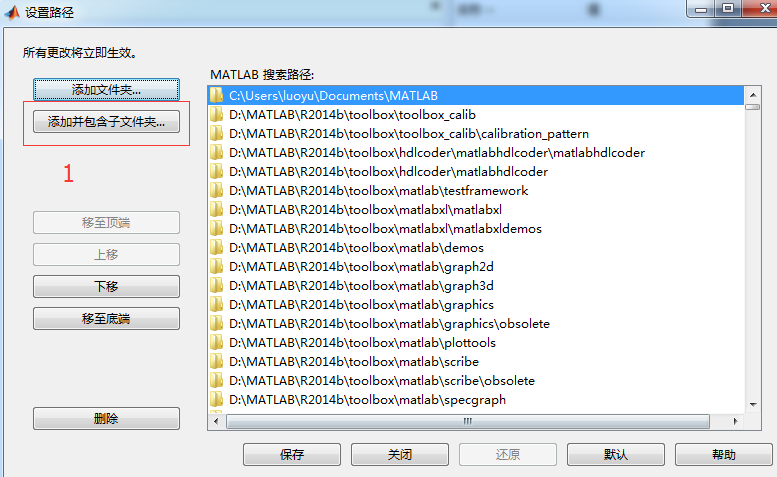
选择工具箱路径为:D:\MATLAB\R2014b\toolbox\toolbox_calib,
然后保存并关闭。
此时,将你采集到的图片放到D:\MATLAB\R2014b\toolbox\toolbox_calib目录下,像这样,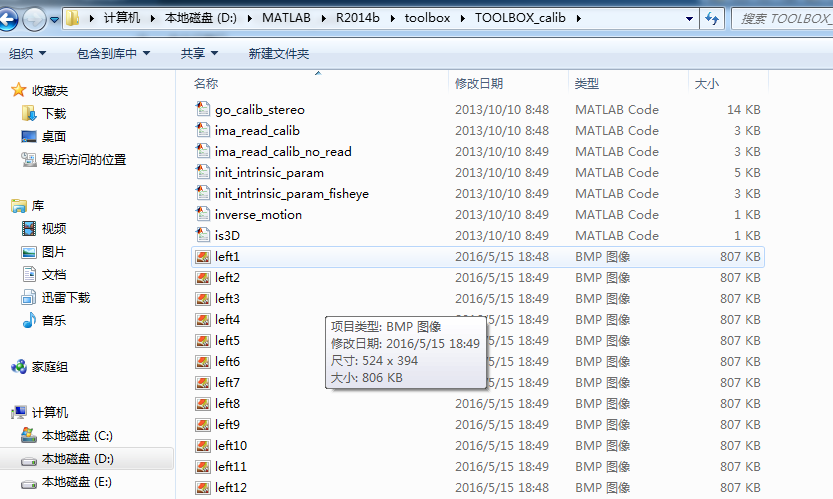
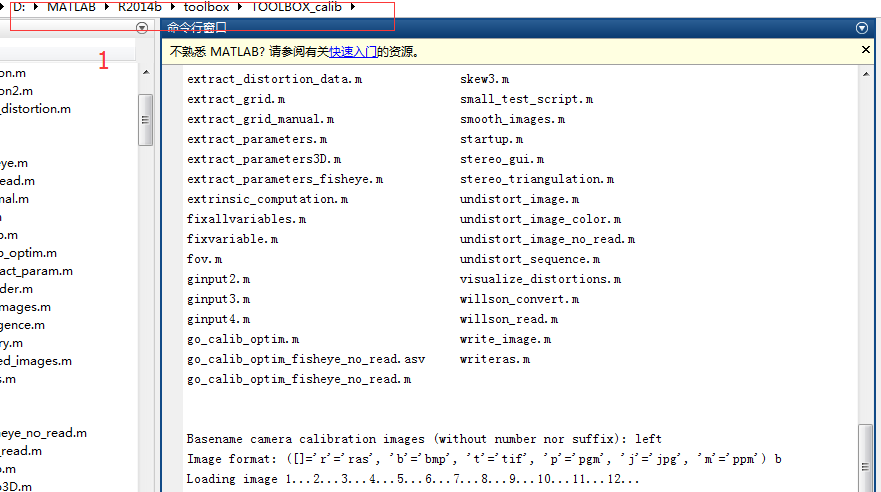
注意上面的路径,待会出现的错误跟这有关。这时候回到MATLAB界面,输入命令,calib_gui
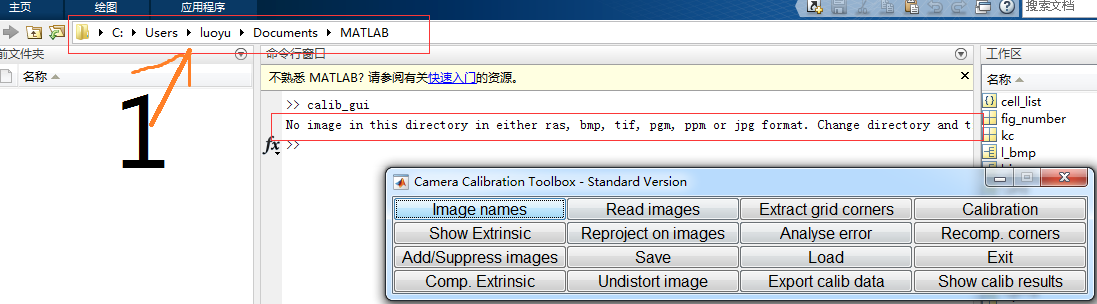
选择standard,出现如下窗口,点击Image name,出现如下错误,说在这个路径下没有图片,那我刚刚导进去十多张的是什么鬼?看了下其他大神的博客,并没有提到这个错误,自己琢磨了会,它说的路径是指MATLAB窗口下上方的路径,如图1所示:
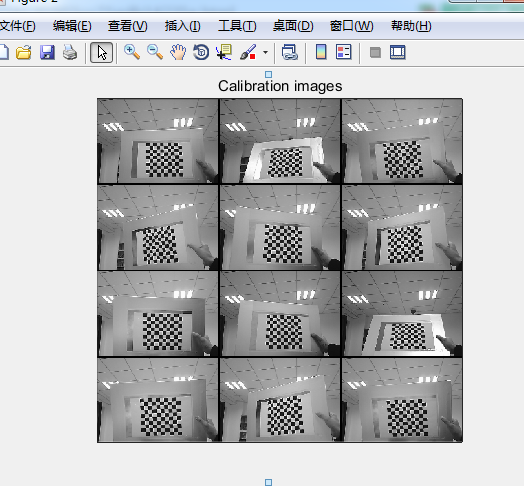
然后会显示读取到的结果如图
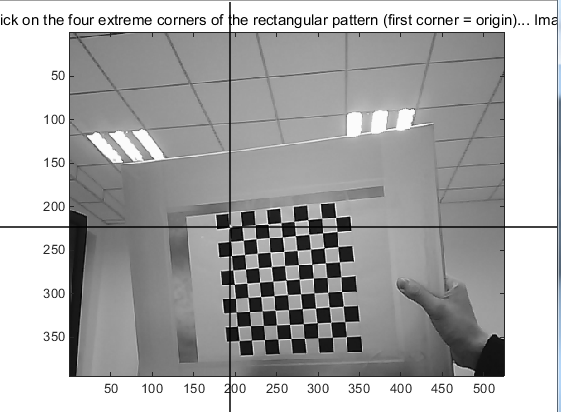
点击Extract grid corners,提取每幅图的角点,点击完成后出现如下界面

这里空着不填,然后让你填入窗口大小,这里有教程说可以不填,我没有填,直接enter,
然后会弹出第一幅图片让你用鼠标选定四个原点,

第一幅图片读完后,后让你输出每个矩形的实际宽与高,然后处完所有读入图片后,
点击工具箱上Calibration,然后会出现内参数结果。证标定结果无误之后,就点击面板上的Save按钮,程序会把标定结果放在一个叫Calib_Result.mat的文件中。为了后续方便将文件名字改写为Calib_Result_left.mat.
这里发现一个问题,至今没想出来,当内存选standard标准,标定到第三幅图时,出现如下界面,点击鼠标却没有出现角点的红色标记
选着memory efficient方式后正常,但我想不明白的是:明明我的内存有12G,也没有出现out of memory 的提示。这里相当困扰,还望有大神能够指点一二。
接下来,按照相同方法标定右摄像头,将结果保存为Calib_Result_right.mat.
2. 双目标定过程
首先将英文的教程奉上:
http://www.vision.caltech.edu/bouguetj/calib_doc/index.html#examples
拉到最下面,查看第五个例子就是。
退出上一个工具箱,在matlab中输入stereo_gui,出现如下界面,点击load left and right calibration files
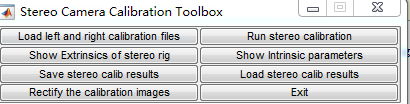
然后再点击 Run stereo calibration ,这里出现了一个错误,如下图所示:
Disabling view 2 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 3 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 4 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 5 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 6 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 7 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 8 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 9 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 10 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 11 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information)
Disabling view 12 - Reason: the left and right images are found inconsistent (try help calib_stereo for more information
看问题描述是因为同一对图像左右不对应的原因,也就是说你采集图像是,棋盘图不能动,此时从左右摄像头各采集一副图片。(天,为什么这么重要的问题,没在一开始的时候说啊!!,得了,回去重新集采图片吧。)
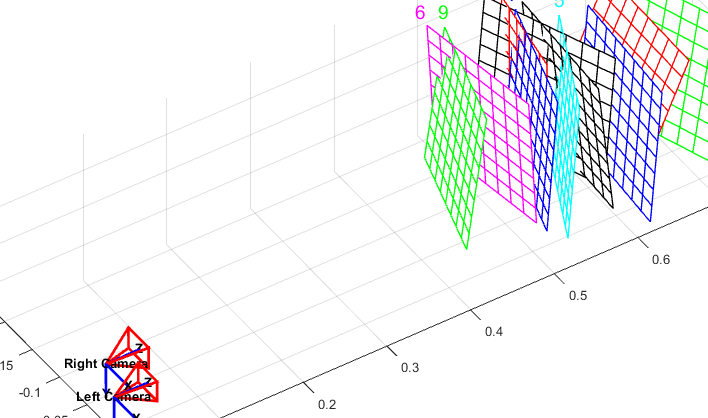
好了,终于采完图,然后又重新做了一遍,在面板上点击Show Extrinsics of stereo rig,可以看到如下图所示的双摄像头关系图,由于没有支架,设备简陋,实在没办法保证两摄像头的起点在同一直线上。














 184
184











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









