







题目可在如下官网的连接中查询
http://www.comap.com/undergraduate/contests/mcm/contests/2017/problems/
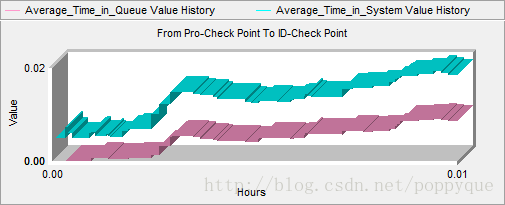
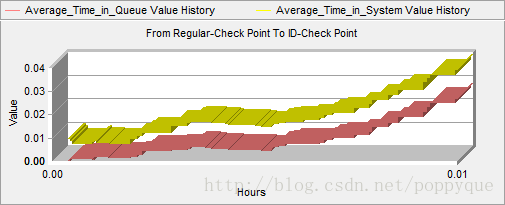
利用pro-model仿真出的这样一个机场Pre-Check的一条人流过程。我们把这个过程分了5部分,开始进入安检大厅有一条队伍,接受ID-Check有一条队伍,拖鞋脱衣等待毫秒波检查有一条队伍,毫秒波检查时有一条队伍,最后穿衣穿鞋拿行李有一条队伍。一共设计了5个排队。
如下图,各个不同部分对应的系统排队时间和队伍排队时间,它们两条线的差也即排队等候时间wait time。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









