Unity 3d 实现物体跟随摄像机视野运动
Created by miccall (转载请注明出处 miccall.tech )
1. VR实现机器人导航
-
项目里要求一个机器人跟随在角色旁边,一直飞着,就像一个精灵一样,总在主角的身边,移动,转头,都要移动到合适的位置 。还得让他面向主角,今天就来实现这个样例 。
-

2. 问题思考
- 1. 物体移动到某个给定的位置(target)
- 2. 物体转动到面向摄像机
- 3. 出现在相机的视野当中
- 4. 自定义物体在摄影机的Screen中的位置
3.实现以及方法
-
移动的话 ,本来可以用动画来实现 ,因为动画还没有做好,我就用一个cube当作那个机器人做样例了 。
首先有个cube之后 ,给他放一个移动的脚本。这里我给他命名为PlayerTank 。
我们的目的就是让他运动到某个target ,所以我们得给他指定一个followTransform 。 同时还有他的移动速度和转动速度 。
为了使他移动不是很突兀,我的思路是他先转动到面向follow物体,然后在直线移动到给物体 。所以算法很快写好了 。
—
void LookTransform(Transform Mtransform)
{
Vector3 tarPos = Mtransform.position
Vector3 dirRot = tarPos - transform.position
Quaternion tarRot = Quaternion.LookRotation(dirRot)
transform.rotation = Quaternion.Slerp(transform.rotation, tarRot, rotSpeed * Time.deltaTime)
}
-
简单解释一下,就是先确定物体的位置,然后求出指向他的方向,并用插值的方法,让物体转动到面向指定的物体 。
好了,既然有了朝向的运动方向,那么走到这方向,就很简单了。
-
transform.Translate(new Vector3(0, 0, movementSpeed * Time.deltaTime))
-
那么什么时候停止运动呢 ,我想了一下,决定用位置的差来判断
就是
-
Vector3.Distance(transform.position, followTransform.position)
-
好了,既然停止的方法也有了,最后要解决的问题就是朝向摄像机了。
突然一想,这是问题么,对,这不是问题 ,哈哈,刚刚写的那个算法,给一个摄像机就解决了嘛 。
然后给出具体的判断逻辑 。
-
if (Vector3.Distance(transform.position, followTransform.position) < 3f)
{
LookTransform(Camre);
return;
}
else
{
LookTransform(followTransform);
transform.Translate(new Vector3(0, 0, movementSpeed * Time.deltaTime));
}
-
这样就解决了物体移动到target了,下一步就是固定target的位置,让他在摄像机的固定位置了 。
新建一个脚本文件CameraView,挂在摄像机上。为了方便调试,我又用了FPS脚本,就是第一人称视角跟随鼠标转动,就跟cs里面的玩法一样,(百度一大推代码)。
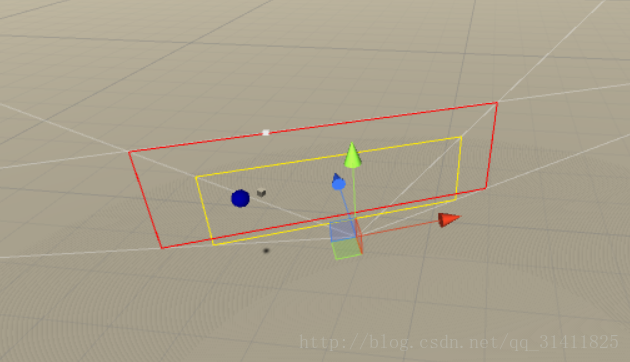
第二个调试算法是一个国外大牛写的 ,他可以给定一个距离,画出摄像机的视野范围
-
-
这里我画了两个边 ,一个是距离摄像机8.5米 用黄色表示,距离摄像机12米的用红色表示。
应为篇幅问题和详略问题,这里不多解释这个算法,有兴趣的可以去研究一下,这里我们引用一下就行了。
-
Vector3[] GetCorners(float distance)
{
Vector3[] corners = new Vector3[4]
float halfFOV = (theCamera.fieldOfView * 0.5f) * Mathf.Deg2Rad
float aspect = theCamera.aspect
float height = distance * Mathf.Tan(halfFOV)
float width = height * aspect
// UpperLeft
corners[0] = tx.position - (tx.right * width)
corners[0] += tx.up * height
corners[0] += tx.forward * distance
// UpperRight
corners[1] = tx.position + (tx.right * width)
corners[1] += tx.up * height
corners[1] += tx.forward * distance
// LowerLeft
corners[2] = tx.position - (tx.right * width)
corners[2] -= tx.up * height
corners[2] += tx.forward * distance
// LowerRight
corners[3] = tx.position + (tx.right * width)
corners[3] -= tx.up * height
corners[3] += tx.forward * distance
return corners
}
void FindUpperCorners()
{
Vector3[] corners = GetCorners(upperDistance)
// for debugging
Debug.DrawLine(corners[0], corners[1], Color.yellow)
Debug.DrawLine(corners[1], corners[3], Color.yellow)
Debug.DrawLine(corners[3], corners[2], Color.yellow)
Debug.DrawLine(corners[2], corners[0], Color.yellow)
}
-
debug的时候,直接调用FindUpperCorners()就可以了 。
刚开始的时候 ,我就用的这个调试 ,给出一个位置,然后计算他的偏移量,调试了很久,没有一个良好的效果,我决定换个思路了 ,为了普遍大众 ,我还是把这个调试方法贴出来了,有需要的可以试试 。
第二个我就去翻api了 ,因为我貌似记得有个屏幕坐标和世界坐标转化的什么鬼方法来着。果然不出我所料,这个方法的确是相当的好用的呀 。
试了一下官方给的调试方法,画了一个点出来 。
-
void OnDrawGizmosSelected()
{
Vector3 p = theCamera.ScreenToWorldPoint(new Vector3(100, 200, 8))
Gizmos.color = Color.blue
//target.position = p
Gizmos.DrawSphere(p, 1F)
}
-
好了,就连我最后决定用的位置也标明了。
然后,我就写了一个很简单的方法来达到目的。
-
void maketarget()
{
Vector3 p = theCamera.ScreenToWorldPoint(new Vector3(RH, RV, upperDistance));
target.position = p;
}
-
写完我都吓了一跳 ,竟然如此简单。还是简单解释一下 ,RH 是水平偏移量,RV是垂直偏移量,upperDistance是距离摄像机的一个平面位置 。
接下来就是运行看效果了 。
-
4.中途出现的小BUG
-
莫名其妙的做圆周运动 ,然后我分析了线速度,角速度和半径的关系 ,然后总结出一个基本的规律,他应该是当运动到某个特定的位置 ,正好满足了圆周运动的关系,然后我们调整movementSpeed 和rotSpeed 的值,让他么尽可能的和Distance消除乘积关系,这样出现的几率就微乎其微了 。
感想 -- 其实unity和现实物理,理论物理 还是有很大的不同。
-






















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









