







-
概念
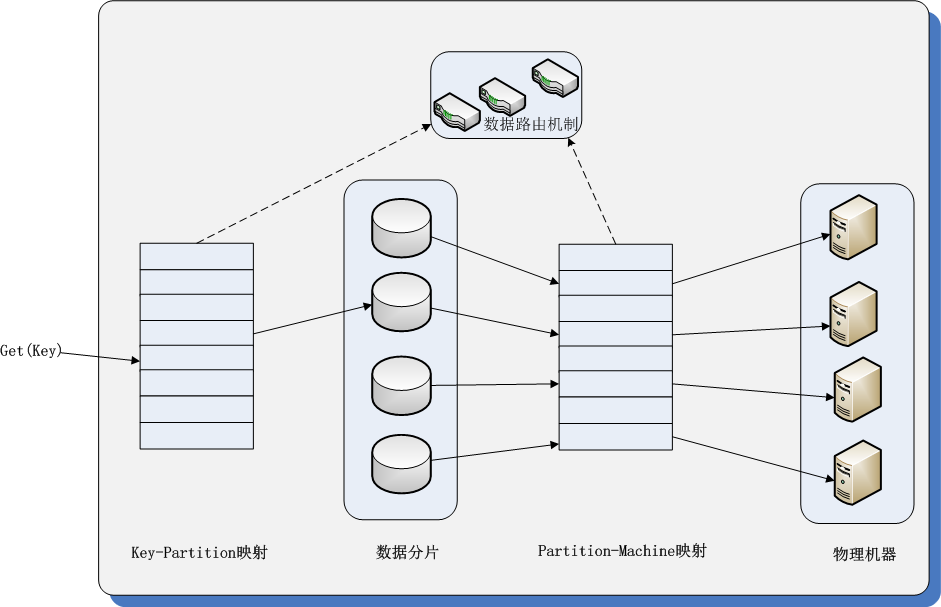
目前主流的大数据存储与计算系统通常采用横向扩展(Scale Out)的方式支持系统可扩展性,即通过增加机器数目来获得水平扩展能力。对于待存储处理的海量数据,需要通过数据分片(Shard/partition)来将数据进行切分并分配到各个机器中去,数据分片后如何找到某条记录的存储位置就成为必然要解决的问题,这一般被称为数据路由(Data Routing)。数据分片和数据路由的抽象模型如下图所示: -
哈希分片(Hash Partition)
最为常见的3种哈希分片方式分别为:Round Robin、虚拟桶和一致性哈希方法。- Round Robin
Round Robin就是常用的哈希取模法,利用哈希函数将数据映射到编号从0到k-1的物理机上。
H(key)=hash(key) mod K
这种分片方式的优点是实现简单,缺点是缺乏灵活性,无法进行横向扩展。 - 虚拟桶(Virtual Buckets)
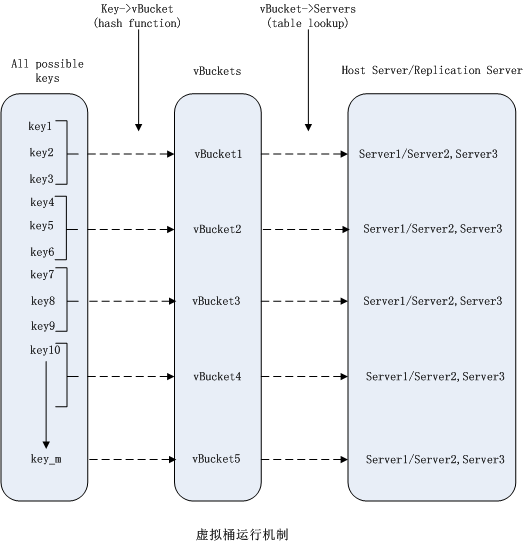
虚拟桶机制将所有记录首先通过哈希函数映射到虚拟桶,记录和虚拟桶是多对一的关系,第二层映射是虚拟桶和物理机之间的映射,也是多对一的关系,其具体实现方式是通过查表来实现的,以Membase为例,虚拟桶运行机制如下图所示:
-
与Round Robin相比,虚拟桶将原先由记录直接到物理机的单层映射解耦成两级映射,大大加强了系统扩展的灵活性,当加入新机器时,将某些虚拟桶从原先分配的机器重新分配给新机器,只需要修改partition-machine映射表中受影响的个别条目就能实现扩展,具有较强的灵活性。
- 一致性哈希(Consistent Hashing)
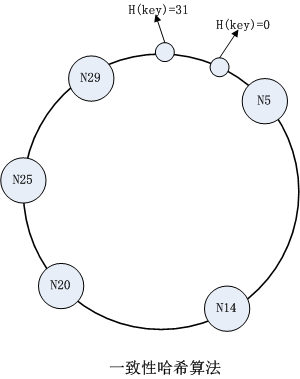
一致性哈希算法被广泛的应用于分布式系统架构中,一致性哈希算法将哈希数值空间按照大小组成一个首尾相接的环状序列。对于不同物理机根据其IP和端口号经过哈希函数映射到哈希空间内,这样不同的机器就构成了环状序列中的不同节点,而每个节点负责存储落在一段有序哈希空间中的数据。如下图是一个哈希空间为32(m=5,2^5=32)的一致性哈希算法示意图,例如N14节点就存储6 < Hash(key) < 14的数据。同时,每个节点记录环中的前趋节点和后继节点地址位置,使之成为一个真正的有向环。
- Round Robin
(1)路由问题
通过以上方式就可以将海量数据分不到集群中的不同节点中,实现数据分片功能。那么如何根据key和哈希函数H来定位到记录内容呢?
一种直观的解决办法就是沿着有向环顺序查找,如果H(key)在本节点管理范围内就返回结果,如果不在则将其交给后继节点继续查找,这样最多遍历所有节点就可以给出结果。
很明显以上方法是一个低效的查找方式,为例加快查找速度,可以为每个节点配置路由表。路由表存储m条路由信息(m为哈希空间的二进制数值比特位长度,即哈希空间长度=2^m),其中第i项存储距离当前节点距离为2^i的数据节点。如N14的节点路由表如下所示:
| 距离 | 1(2^0) | 2(2^1) | 4(2^2) | 8(2^3) | 16(2^4) |
|---|---|---|---|---|---|
| 机器节点 | N20 | N20 | N20 | N25 | N5 |
算法:假设当前执行操作的节点为Nc,其初始值为Ni,Nc的后继节点为Ns,重复执行下列步骤。
步骤1,判断是否c < j <= s,如果为真,则结束查找,说明key如果存在,则在Nc的后继节点Ns上,Ns返回结果。
步骤2,否则,Nc查找路由表,找到小于j的最大编号节点Nh(如果所有路由项都大于j,则选择第m-1项作为Nh),Nc向Nh发送消息,由Nh代为查找,Nh此时作为新的Nc继续按照步骤1,步骤2递归进行查找。
此算法的时间复杂度为O(logn),类似于二分查找。
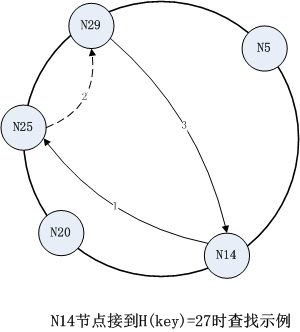
下图为N14节点接收到H(key)=27时的查找过程:
(2)加入新节点
如果P2P网络加入一个新节点Nnew,首先Nnew能够和任意节点Nx进行通信,通过Nx按照“路由算法”查询Nnew的对应哈希值H(Nnew)=new,找到Nnew的后继节点Ns,假设Ns的前趋节点为Np,那么需要做两件事将Nnew加入网络:
一. 改变Np、Nnew和Ns的前趋后继节点记录,以体现新的网络架构。
二. 数据的重新分片与分布,将Ns节点中存储的应该由Nnew承载的数据(Ns节点上哈希值小于等于new的记录)迁移到Nnew节点上。
在非并发环境中以上事务较易完成,但是在并发环境中,可能Np和Ns之间同时有多个节点加入,为了避免出现问题,需按照以下两个步骤完成:
一. 将Nnew的后继节点设置为null。
二. 这一步并非为新加入节点设立的,而是所有节点周期性自动完成,稳定性检测。
- 稳定性检测
算法:
步骤1,假设Ns为Nc的后继节点,Nc向Ns询问其前趋节点Np,Ns向Ns答复,一般情况下,如果Np=Nc则转入第4步。
步骤2,如果Np介于Nc和Ns之间,Nc记录下Np为其后继节点。
步骤3,令Nx是Nc的后继节点,其可能是Ns或者Np,这取决于步骤2的判断结果。如果Nx的前趋节点为空或者Nc位于Nx和它的前趋节点之间,那么Nc给Nx发消息告诉Nx,Nc就是Nx的前趋节点,Nx将其前趋节点设置为Nc。
步骤4,Nx将其部分数据迁移到Nc上,即将Nx上哈希值小于等于c的记录迁移到Nc上。
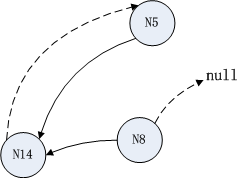
示例,将N8加入上述网络
1.根据步骤一,将N8的后继节点设为N14,前趋节点置为null,如下图所示:
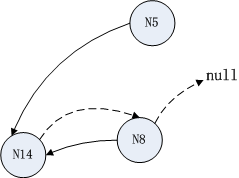
2.N8进行稳定性检测,步骤1中,N8发现N14的前趋节点不是自己,进入步骤2,由于N5没有介于N8和N14之间,所以直接进入步骤3,因为N8位于N5和N14之间,所以N8向N14发消息,告知N14的前趋节点改为N8,N14的前趋指向N8,如下图所示:
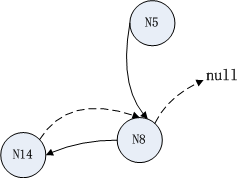
3.进入步骤4,N14将部分数据迁移到N8。
一段时间后,N5开始进行稳定性检测,经过步骤N5被告知,N14的前趋节点是N8而不是自己,所以进入步骤2,由于N8介于N5和N14之间,所以N5将后继节点改为N8,如下图所示:
进入步骤3,由于N8的前趋节点为空,所以N5通知N8其前趋节点为N5,所以N8将前趋节点置为N5,如下图所示:
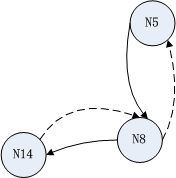
进入步骤4,N8没有需要向N5迁移的数据,结束。
这样,N8节点就顺利的加入了网络。
(3)当前节点离开网络
当前节点离开网络有两种方式:正常离开和异常离开。正常离开的节点在离开前可以做些准备工作,包括通知相应节点修改前趋后继以及将持有数据迁移到相应机器上。异常离开通常是由于机器故障导致,为避免数据丢失,可以采用将数据备份的方式解决。
关于路由表失效问题,可以通过对每个节点定期检查路由表的方式解决。
(4)虚拟节点
上述一致性哈希算法存在两个问题,一个是数据映射是随机的,可能导致集群的负载不均衡,另一个是集群中的节点存在性能上的差异,可能会导致低性能节点高负载的情况,而且新节点加入时只能缓解其后继一个节点的容量饱和问题,不能有效的缓解集群中其他节点的容量饱和问题。针对以上问题,引入“虚拟节点”的概念,即将一台物理机器虚拟成若干个虚拟节点,分别映射到一致性哈希环的不同位置。这样就解决了上述问题。
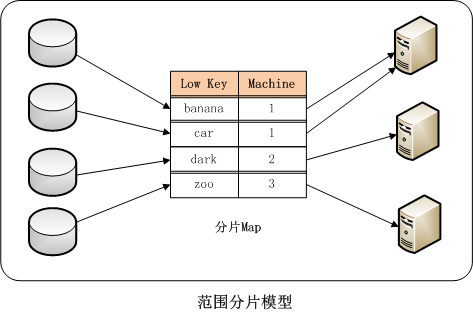
3 . 范围分片(Range Partition)
范围分片首先将所有记录主键进行排序,然后在排好序的主键空间里将记录划分成数据分片,每个数据分片存储有序的主键空间片段内的所有记录。保持一个数据分片的映射表,表中每一项记在数据分片的最小主键及其对应的物理机地址,在对记录进行增删改时,查找映射表找到其对应的物理机,置于分片数据在物理机的管理方式往往采用LSM树(Log Structured Merge Trees),这是一种高效的数据索引结构。范围分片的模型如下图所示:















 749
749











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











