










最近有空,在UE4上,做了一个姿态控制的外设。硬件用的MPU6050+Arduino。姿态控制效果还可以。
这里传了个视频,可以看到实际操作的效果。
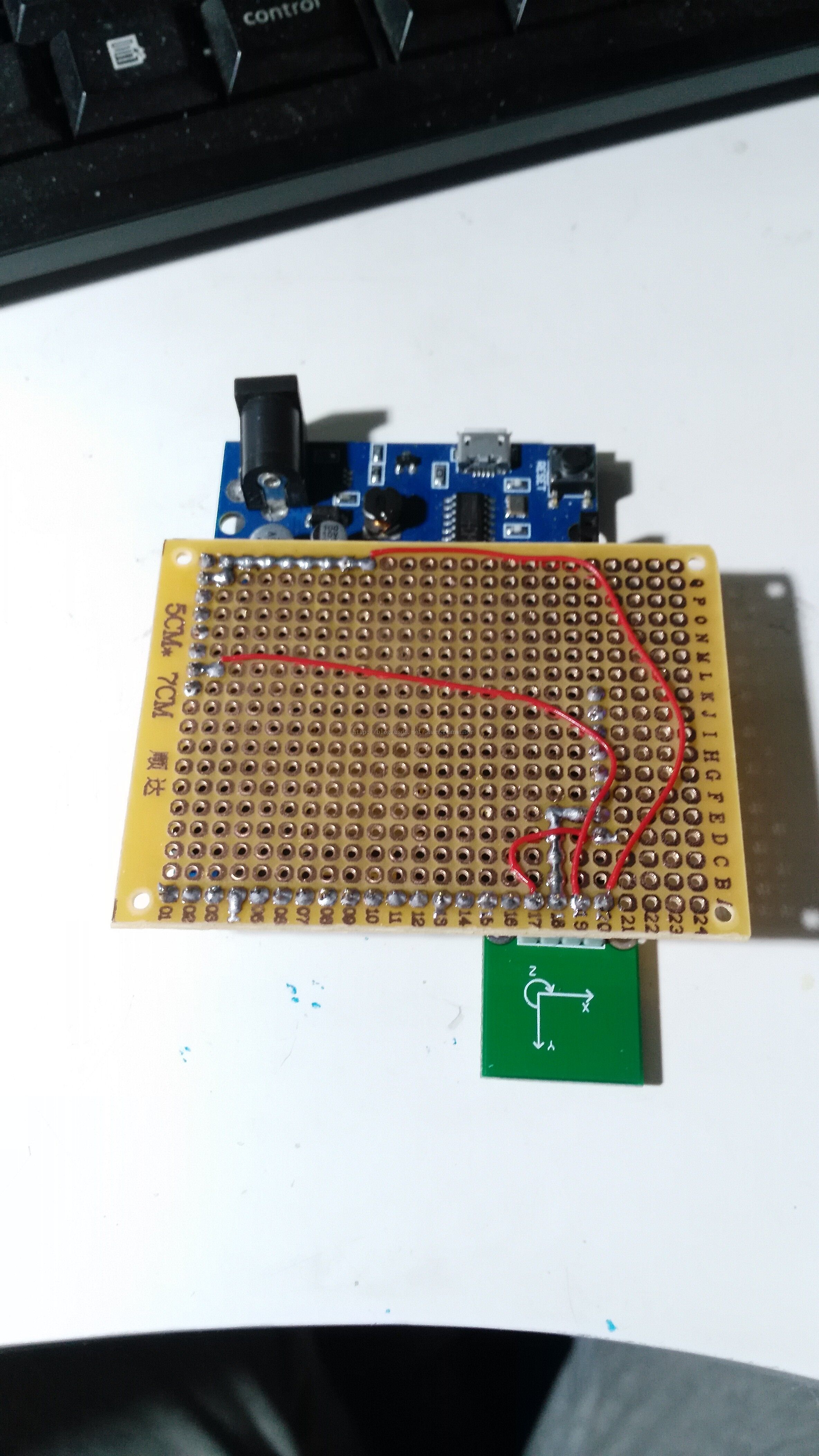
Arduino使用的是ESP8266,方便把原始的加速度计的数据通过UDP协议传送的上位机。电路直接用的洞洞板焊上排针,插到Arduino的排母上,结实倒是挺结实的,就是丑了点。后续如果想做得更小一点,考虑画个PCB,用单片机配合nRF24L01模块来做。
最后,也尝试了,用MPU6050实现三维跟踪,效果不是很好,位置漂得厉害,暂时无力解决。
后续会放出源代码,供读者参考,就这样。














 1780
1780











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









