







重投影误差与对称转移误差
@[机器视觉] [多视图几何]
最近在阅读相机标定相关知识,发现自己对于重投影误差(Reprojection Error)的理解居然是对称转移误差(Symmetric transfer error),今天在这里对这两个名词作个解释。
重投影误差
The reprojection error is a geometric error corresponding to the image distance between a projected point and a measured one. —— 维基百科
重投影误差是指投影的点(理论值)与图像上的测量点的误差。例如在标定的时候我们经常用到重投影误差作为最终标定效果的评价标准,我们认为标定板上的物理点是理论值,它经过投影变换后会得到理论的像素点a,而测量的点经过畸变矫正后的像素点为 a′ ,它们的欧氏距离 ||a−a′||2 即表示重投影误差。
对称转移误差
左右图像上某一对测量的得到的匹配点,各自经过单应变换得到各自的理论匹配点,对称转移误差是指这一对测量得到的匹配点与另一张图像变换过来的理论匹配点的欧式距离,如下图所示,摘自Multiple View Geometry in Computer Vision
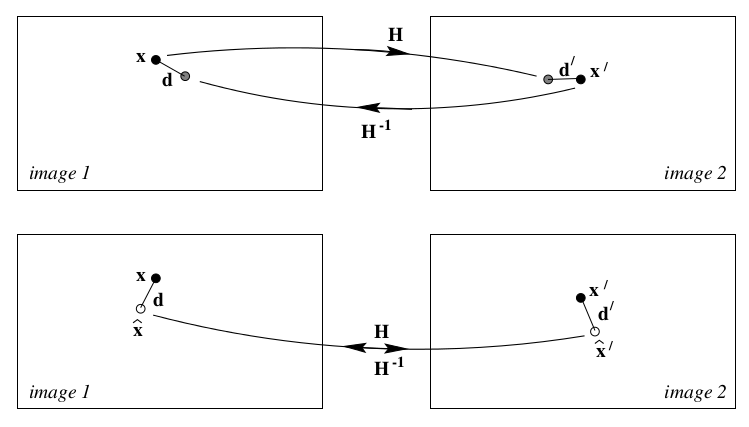
以上是对称转移误差(upper)和重投影误差(lower)的对比图。点
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2491
2491











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









