







%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 程序说明:练习使用plot函数,线型设置
% 详细原理介绍请参考:
% 《卡尔曼滤波原理及应用-MATLAB仿真》,电子工业出版社,黄小平著。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% function main % 主函数
A1=randn(1,10);
A2=randn(1,10);
A3=randn(1,10);
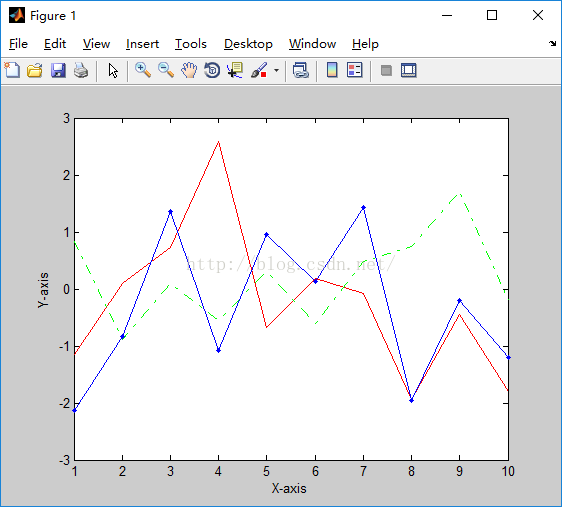
% 画图1
figure
box on
hold on; %在同一个figure中多次调用plot,需要hold
plot(A1,'-r') %红色的实线
plot(A2,'-.g') %绿色的点画线
plot(A3,'-b.') %蓝色的实现,数据点为点
xlabel('X-axis')
ylabel('Y-axis')
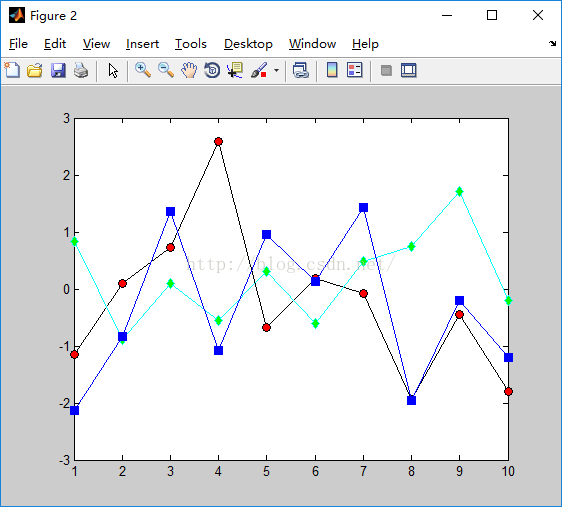
% 画图2
figure
box on
hold on; %在同一个figure中多次调用plot,需要hold
plot(A1,'-ko','MarkerFaceColor','r') %黑色实线,红色圆圈数据点
plot(A2,'-cd','MarkerFaceColor','g') %蓝绿色实线,绿色菱形数据点
plot(A3,'-bs','MarkerFaceColor','b') %蓝色实线,蓝色方形数据点
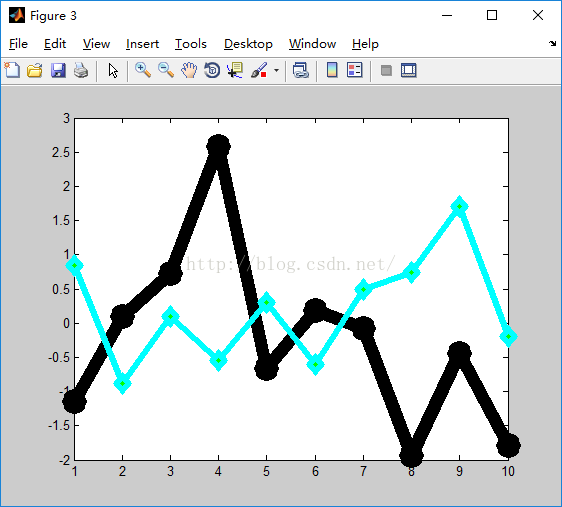
% 画图3
figure
box on
hold on; %在同一个figure中多次调用plot,需要hold
%黑色实线,红色圆圈数据点,原点的颜色设为红色,大小为10,线宽为10,后三者顺序随便
plot(A1,'-ko','MarkerFaceColor','r','MarkerSize',10,'LineWidth',10)
%蓝绿色实线,菱形数据点,原点的颜色设为绿色,大小为10,线宽为5,后三者顺序随便
plot(A2,'-cd','MarkerFaceColor','g','LineWidth',5,'MarkerSize',10);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
结果:














 2703
2703











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









