







一、前言
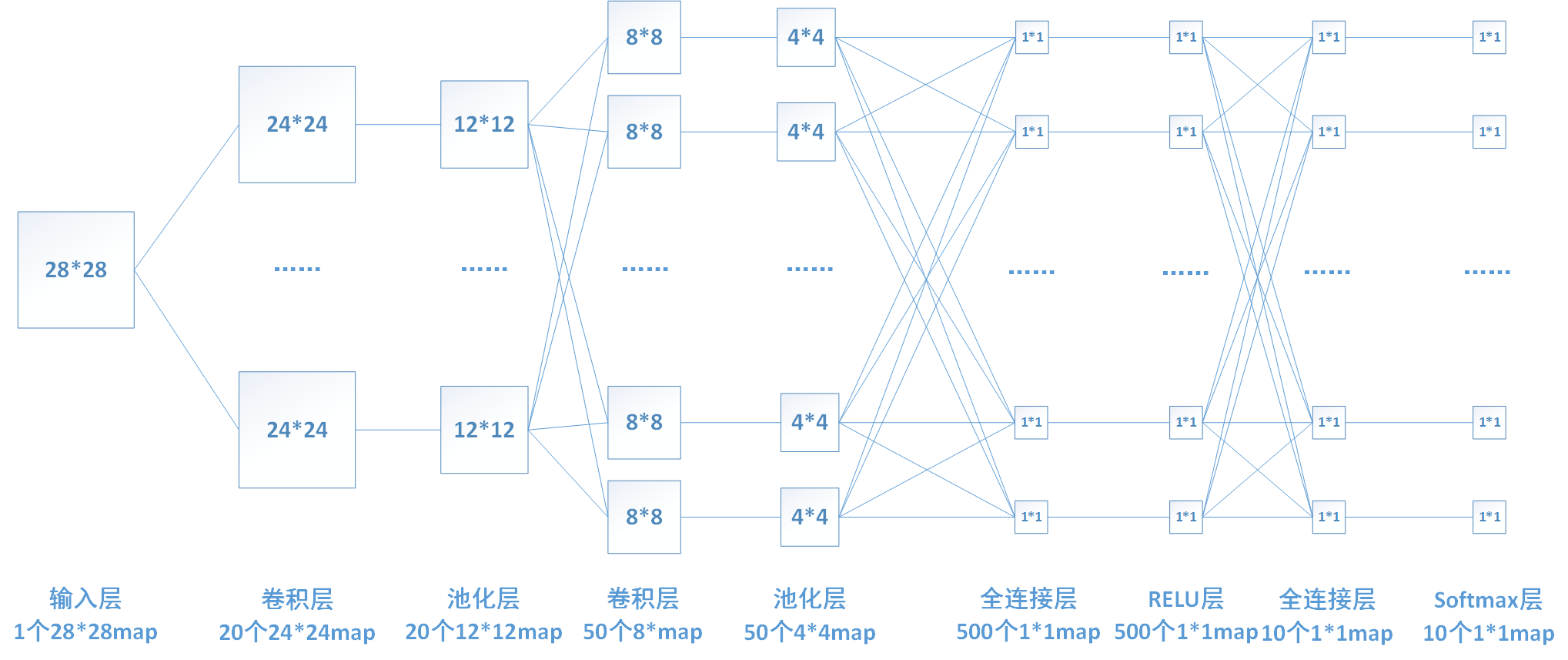
池化层的输入来自上一个卷积层的输出,主要作用是提供了平移不变性,并且减少了参数的数量,防止过拟合现象的发生。比如在最大池化中,选择区域内最大的值为采样点,这样在发生平移的时候,采样点不变。
池化层一般没有参数,所以反向传播的时候,只需对输入参数求导,不需要进行权值更新。
平均值效果不佳,一般选择最大池化。
二、源码分析
1、LayerSetUp函数
跟卷积层类似,主要是导入池化层的各参数
template <typename Dtype>
void PoolingLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
PoolingParameter pool_param = this->layer_param_.pooling_param();//池化参数
if (pool_param.global_pooling()) {全局池化不需要参数
CHECK(!(pool_param.has_kernel_size() ||
pool_param.has_kernel_h() || pool_param.has_kernel_w()))
<< "With Global_pooling: true Filter size cannot specified";
} else {
CHECK(!pool_param.has_kernel_size() !=
!(pool_param.has_kernel_h() && pool_param.has_kernel_w()))//kernel_size和kernel_h、kernel_w 二选一
<< "Filter size is kernel_size OR kernel_h and kernel_w; not both";
CHECK(pool_param.has_kernel_size() ||
(pool_param.has_kernel_h() && pool_param.has_kernel_w()))
<< "For non-square filters both kernel_h and kernel_w are required.";
}
CHECK((!pool_param.has_pad() && pool_param.has_pad_h()
&& pool_param.has_pad_w())
|| (!pool_param.has_pad_h() && !pool_param.has_pad_w()))
<< "pad is pad OR pad_h and pad_w are required.";
CHECK((!pool_param.has_stride() && pool_param.has_stride_h()
&& pool_param.has_stride_w())
|| (!pool_param.has_stride_h() && !pool_param.has_stride_w()))
<< "Stride is stride OR stride_h and stride_w are required.";
global_pooling_ = pool_param.global_pooling();
if (global_pooling_) {
kernel_h_ = bottom[0]->height();
kernel_w_ = bottom[0]->width();
} else {
if (pool_param.has_kernel_size()) {
kernel_h_ = kernel_w_ = pool_param.kernel_size();
} else {
kernel_h_ = pool_param.kernel_h();
kernel_w_ = pool_param.kernel_w();
}
}
CHECK_GT(kernel_h_, 0) << "Filter dimensions cannot be zero.";
CHECK_GT(kernel_w_, 0) << "Filter dimensions cannot be zero.";
if (!pool_param.has_pad_h()) {
pad_h_ = pad_w_ = pool_param.pad();
} else {
pad_h_ = pool_param.pad_h();
pad_w_ = pool_param.pad_w();
}
if (!pool_param.has_stride_h()) {
stride_h_ = stride_w_ = pool_param.stride();
} else {
stride_h_ = pool_param.stride_h();
stride_w_ = pool_param.stride_w();
}
if (global_pooling_) {
CHECK(pad_h_ == 0 && pad_w_ == 0 && stride_h_ == 1 && stride_w_ == 1)
<< "With Global_pooling: true; only pad = 0 and stride = 1";
}
if (pad_h_ != 0 || pad_w_ != 0) {
CHECK(this->layer_param_.pooling_param().pool()
== PoolingParameter_PoolMethod_AVE
|| this->layer_param_.pooling_param().pool()
== PoolingParameter_PoolMethod_MAX)
<< "Padding implemented only for average and max pooling.";
CHECK_LT(pad_h_, kernel_h_);
CHECK_LT(pad_w_, kernel_w_);
}
}
2、reshape
template <typename Dtype>
void PoolingLayer<Dtype>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
CHECK_EQ(4, bottom[0]->num_axes()) << "Input must have 4 axes, "
<< "corresponding to (num, channels, height, width)";
channels_ = bottom[0]->channels();
height_ = bottom[0]->height();
width_ = bottom[0]->width();
if (global_pooling_) {//全局池化,核的大小和输入图像相同
kernel_h_ = bottom[0]->height();
kernel_w_ = bottom[0]->width();
}//否则按公式计算:( height_ + 2 * pad_h_ - kernel_h_) / stride_h_)) + 1
pooled_height_ = static_cast<int>(ceil(static_cast<float>(
height_ + 2 * pad_h_ - kernel_h_) / stride_h_)) + 1;
pooled_width_ = static_cast<int>(ceil(static_cast<float>(
width_ + 2 * pad_w_ - kernel_w_) / stride_w_)) + 1;
if (pad_h_ || pad_w_) {
//确保在有填充的情况下,采样从图像内开始
if ((pooled_height_ - 1) * stride_h_ >= height_ + pad_h_) {
--pooled_height_;
}
if ((pooled_width_ - 1) * stride_w_ >= width_ + pad_w_) {
--pooled_width_;
}
CHECK_LT((pooled_height_ - 1) * stride_h_, height_ + pad_h_);
CHECK_LT((pooled_width_ - 1) * stride_w_, width_ + pad_w_);
}
top[0]->Reshape(bottom[0]->num(), channels_, pooled_height_,
pooled_width_);//输出形状:(num,channels_,pooled_height_,pooled_width_)
if (top.size() > 1) {
top[1]->ReshapeLike(*top[0]);
}
// If max pooling, we will initialize the vector index part.
if (this->layer_param_.pooling_param().pool() ==
PoolingParameter_PoolMethod_MAX && top.size() == 1) {
max_idx_.Reshape(bottom[0]->num(), channels_, pooled_height_,
pooled_width_);//最大池化,记录取到的最大值的索引的形状
}
// If stochastic pooling, we will initialize the random index part.
if (this->layer_param_.pooling_param().pool() ==
PoolingParameter_PoolMethod_STOCHASTIC) {
rand_idx_.Reshape(bottom[0]->num(), channels_, pooled_height_,
pooled_width_);//随机池化,同样还有记录随机采样的索引的形状
}
}
3、前向计算
前向计算过程中,我们对卷积层输出map的每个不重叠(有时也可以使用重叠的区域进行池化)的n*n区域进行降采样,选取每个区域中的最大值(max-pooling)或是平均值(mean-pooling),也有最小值的降采样,计算过程和最大值的计算类似。
max-pooling:
template <typename Dtype>
void PoolingLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
const Dtype* bottom_data = bottom[0]->cpu_data();//输入数据明显只读
Dtype* top_data = top[0]->mutable_cpu_data();
const int top_count = top[0]->count();
// We'll output the mask to top[1] if it's of size >1.
const bool use_top_mask = top.size() > 1;
int* mask = NULL; // 未初始化变量
Dtype* top_mask = NULL;
// 不同的池化方式
switch (this->layer_param_.pooling_param().pool()) {
case PoolingParameter_PoolMethod_MAX://最大池化
// Initialize
if (use_top_mask) {//表示输出大于1,那么就用top_mask记录索引
top_mask = top[1]->mutable_cpu_data();
caffe_set(top_count, Dtype(-1), top_mask);//初始化-1
} else {//输出只有一个的时候
mask = max_idx_.mutable_cpu_data();
caffe_set(top_count, -1, mask);
}
caffe_set(top_count, Dtype(-FLT_MAX), top_data);
// The main loop
for (int n = 0; n < bottom[0]->num(); ++n) {
for (int c = 0; c < channels_; ++c) {
for (int ph = 0; ph < pooled_height_; ++ph) {
for (int pw = 0; pw < pooled_width_; ++pw) {
int hstart = ph * stride_h_ - pad_h_;
int wstart = pw * stride_w_ - pad_w_;
int hend = min(hstart + kernel_h_, height_);//防止核滑到图像外
int wend = min(wstart + kernel_w_, width_);//防止核滑到图像外
hstart = max(hstart, 0);//防止核滑到图像外
wstart = max(wstart, 0);//防止核滑到图像外
const int pool_index = ph * pooled_width_ + pw;//行优先
for (int h = hstart; h < hend; ++h) {
for (int w = wstart; w < wend; ++w) {
const int index = h * width_ + w;/滑动的坐标
if (bottom_data[index] > top_data[pool_index]) {
top_data[pool_index] = bottom_data[index];//每个值相比,取最大值
if (use_top_mask) {
top_mask[pool_index] = static_cast<Dtype>(index);
} else {
mask[pool_index] = index;//记录索引
}
}
}
}
}
}
// compute offset
bottom_data += bottom[0]->offset(0, 1);//地址偏移,每次移动W×H,表明一张图处理完毕
top_data += top[0]->offset(0, 1);
if (use_top_mask) {
top_mask += top[0]->offset(0, 1);
} else {
mask += top[0]->offset(0, 1);
}
}
}
break;
case PoolingParameter_PoolMethod_AVE://平均池化
for (int i = 0; i < top_count; ++i) {
top_data[i] = 0;
}
// The main loop
for (int n = 0; n < bottom[0]->num(); ++n) {
for (int c = 0; c < channels_; ++c) {
for (int ph = 0; ph < pooled_height_; ++ph) {
for (int pw = 0; pw < pooled_width_; ++pw) {
int hstart = ph * stride_h_ - pad_h_;
int wstart = pw * stride_w_ - pad_w_;
int hend = min(hstart + kernel_h_, height_ + pad_h_);
int wend = min(wstart + kernel_w_, width_ + pad_w_);
int pool_size = (hend - hstart) * (wend - wstart);
hstart = max(hstart, 0);
wstart = max(wstart, 0);
hend = min(hend, height_);
wend = min(wend, width_);
for (int h = hstart; h < hend; ++h) {
for (int w = wstart; w < wend; ++w) {
top_data[ph * pooled_width_ + pw] +=
bottom_data[h * width_ + w];/求和
}
}
top_data[ph * pooled_width_ + pw] /= pool_size;//做平均
}
}
// compute offset
bottom_data += bottom[0]->offset(0, 1);
top_data += top[0]->offset(0, 1);
}
}
break;
case PoolingParameter_PoolMethod_STOCHASTIC://随机池化没有实现,将报错
NOT_IMPLEMENTED;
break;
default:
LOG(FATAL) << "Unknown pooling method.";
}
}
GPU版的前向计算
template <typename Dtype>
__global__ void MaxPoolForward(const int nthreads,
const Dtype* const bottom_data, const int num, const int channels,
const int height, const int width, const int pooled_height,
const int pooled_width, const int kernel_h, const int kernel_w,
const int stride_h, const int stride_w, const int pad_h, const int pad_w,
Dtype* const top_data, int* mask, Dtype* top_mask) {
//index是线程索引
//nthreads为线程的总数,为该pooling层top blob的输出神经元总数,也就是说一个线程对应输出的一个结点
CUDA_KERNEL_LOOP(index, nthreads) {
const int pw = index % pooled_width;//线程对应的是输出Feature Map的中的宽
const int ph = (index / pooled_width) % pooled_height;//线程对应的是输出Feature Map的中的高
const int c = (index / pooled_width / pooled_height) % channels;//线程对应的是channels
const int n = index / pooled_width / pooled_height / channels;//线程对应的是num
int hstart = ph * stride_h - pad_h;//输入的坐标起始点
int wstart = pw * stride_w - pad_w;
const int hend = min(hstart + kernel_h, height);//输入的坐标终止点
const int wend = min(wstart + kernel_w, width);
hstart = max(hstart, 0);
wstart = max(wstart, 0);
Dtype maxval = -FLT_MAX;
int maxidx = -1;
const Dtype* const bottom_slice =
bottom_data + (n * channels + c) * height * width;//输入的一个feature的切片
for (int h = hstart; h < hend; ++h) {
for (int w = wstart; w < wend; ++w) {
if (bottom_slice[h * width + w] > maxval) {
maxidx = h * width + w;
maxval = bottom_slice[maxidx];
}
}
}
// index正好是top blob中对应点的索引,这也是为什么线程都是用了一维的维度
// 数据在Blob.data中最后都是一维的形式保存的
top_data[index] = maxval;
if (mask) {
mask[index] = maxidx;
} else {
top_mask[index] = maxidx;
}
}
}
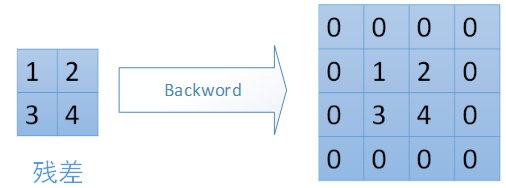
4、反向计算
对于max-pooling,在前向计算时,是选取的每个2*2区域中的最大值,这里需要记录下最大值在每个小区域中的位置。在反向传播时,只有那个最大值对下一层有贡献,所以将残差传递到该最大值的位置,区域内其他2*2-1=3个位置置零。具体过程如下图,其中4*4矩阵中非零的位置即为前边计算出来的每个小区域的最大值的位置。
maxpooling层是非线性变换,但有输入与输出的关系可线性表达为bottom_dataj=top_datai(所以需要前向计算时需要记录索引i到索引j的映射max_idx_)
template <typename Dtype>
void PoolingLayer<Dtype>::Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down, const vector<Blob<Dtype>*>& bottom) {
if (!propagate_down[0]) {
return;
}
const Dtype* top_diff = top[0]->cpu_diff();
Dtype* bottom_diff = bottom[0]->mutable_cpu_diff();
// Different pooling methods. We explicitly do the switch outside the for
// loop to save time, although this results in more codes.
caffe_set(bottom[0]->count(), Dtype(0), bottom_diff);//首先全部初始化为0
// We'll output the mask to top[1] if it's of size >1.
const bool use_top_mask = top.size() > 1;
const int* mask = NULL; // suppress warnings about uninitialized variables
const Dtype* top_mask = NULL;
switch (this->layer_param_.pooling_param().pool()) {
case PoolingParameter_PoolMethod_MAX:
// The main loop
if (use_top_mask) {
top_mask = top[1]->cpu_data();
} else {
mask = max_idx_.cpu_data();
}
for (int n = 0; n < top[0]->num(); ++n) {
for (int c = 0; c < channels_; ++c) {
for (int ph = 0; ph < pooled_height_; ++ph) {
for (int pw = 0; pw < pooled_width_; ++pw) {
const int index = ph * pooled_width_ + pw;
const int bottom_index =
use_top_mask ? top_mask[index] : mask[index];
bottom_diff[bottom_index] += top_diff[index];//在最大值索引处还原最大值,其余地方仍然为0
}
}
bottom_diff += bottom[0]->offset(0, 1);
top_diff += top[0]->offset(0, 1);
if (use_top_mask) {
top_mask += top[0]->offset(0, 1);
} else {
mask += top[0]->offset(0, 1);
}
}
}
break;
case PoolingParameter_PoolMethod_AVE:
// The main loop
for (int n = 0; n < top[0]->num(); ++n) {
for (int c = 0; c < channels_; ++c) {
for (int ph = 0; ph < pooled_height_; ++ph) {
for (int pw = 0; pw < pooled_width_; ++pw) {
int hstart = ph * stride_h_ - pad_h_;
int wstart = pw * stride_w_ - pad_w_;
int hend = min(hstart + kernel_h_, height_ + pad_h_);
int wend = min(wstart + kernel_w_, width_ + pad_w_);
int pool_size = (hend - hstart) * (wend - wstart);
hstart = max(hstart, 0);
wstart = max(wstart, 0);
hend = min(hend, height_);
wend = min(wend, width_);
for (int h = hstart; h < hend; ++h) {
for (int w = wstart; w < wend; ++w) {
bottom_diff[h * width_ + w] +=
top_diff[ph * pooled_width_ + pw] / pool_size;
}
}
}
}
// offset
bottom_diff += bottom[0]->offset(0, 1);
top_diff += top[0]->offset(0, 1);
}
}
break;
case PoolingParameter_PoolMethod_STOCHASTIC:
NOT_IMPLEMENTED;
break;
default:
LOG(FATAL) << "Unknown pooling method.";
}
}
相应的GPU版本:
template <typename Dtype>
__global__ void MaxPoolBackward(const int nthreads, const Dtype* const top_diff,
const int* const mask, const Dtype* const top_mask, const int num,
const int channels, const int height, const int width,
const int pooled_height, const int pooled_width, const int kernel_h,
const int kernel_w, const int stride_h, const int stride_w, const int pad_h,
const int pad_w, Dtype* const bottom_diff) {
CUDA_KERNEL_LOOP(index, nthreads) {
// find out the local index
// find out the local offset
const int w = index % width;
const int h = (index / width) % height;
const int c = (index / width / height) % channels;
const int n = index / width / height / channels;
const int phstart =
(h + pad_h < kernel_h) ? 0 : (h + pad_h - kernel_h) / stride_h + 1;
const int phend = min((h + pad_h) / stride_h + 1, pooled_height);
const int pwstart =
(w + pad_w < kernel_w) ? 0 : (w + pad_w - kernel_w) / stride_w + 1;
const int pwend = min((w + pad_w) / stride_w + 1, pooled_width);
Dtype gradient = 0;
const int offset = (n * channels + c) * pooled_height * pooled_width;
const Dtype* const top_diff_slice = top_diff + offset;
if (mask) {
const int* const mask_slice = mask + offset;
for (int ph = phstart; ph < phend; ++ph) {
for (int pw = pwstart; pw < pwend; ++pw) {
if (mask_slice[ph * pooled_width + pw] == h * width + w) {
gradient += top_diff_slice[ph * pooled_width + pw];
}
}
}
} else {
const Dtype* const top_mask_slice = top_mask + offset;
for (int ph = phstart; ph < phend; ++ph) {
for (int pw = pwstart; pw < pwend; ++pw) {
if (top_mask_slice[ph * pooled_width + pw] == h * width + w) {
gradient += top_diff_slice[ph * pooled_width + pw];
}
}
}
}
bottom_diff[index] = gradient;
}
}














 1433
1433











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









