









第一次写这样的技术博客,如有不周欢迎大家批评指正,也使得我能在辩证交流中学的深刻些!
关于张教授的标定法优缺点以及原理,网上资源已经很多,大家也总结的很细致,我就不再废话了,我只想吐槽下一些看起来很简单,但是又很容易被忽略的小问题,说的是我,也有可能是你,以下仅代表我个人的理解,不具有权威性,希望能和小同行的你一起探讨,共同进步。
Q1:张教授在文中说,单应性矩阵H有8个自由度,并且有6个外参(3个旋转参数,3个平移参数),我们有两个约束条件是关于内参的。我想,张教授自然是不会在文中说些无关的话,即浪费笔墨纸张又显得行文不够精炼紧凑。那么问题来了,8个自由度如何解释?8个自由度与6个外参有什么关系?为什么不是11个参数?如果11个参数,两个方程如何求解?
A1: 以上是我在给导师做汇报的时候被问倒的,汇报之前,我上网查阅前辈们的相关经验,看张教授给的各种解释,自以为做好了充分的准备,但面对导师的这些问题,似懂但又非懂,不能坚定的讲清楚,于是无奈只能继续啃……自己一个人扣真心很苦(┬_┬) ……OK,言归正传:
所谓的8个自由度:
世界坐标系下的点M(x,y,z)与像素坐标系下的对应点m(u,v)之间的投影关系为:[u,v,1]' = H[x,y,z,1]',张氏标定法假设标定板在 z= 0 处,那么上式即为 [u,v]' = H[x,y,1]';将H写成3×3矩阵形式
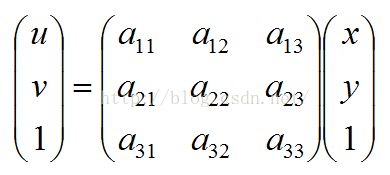
如果将H的第三行第三列元素化成1,则其他8项都可以由a_33表示(如下式所示),即H有8个自由度。
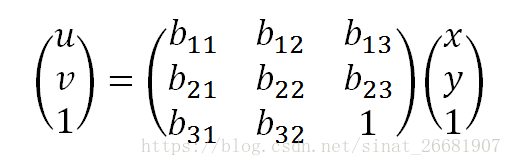
(感谢 @奋斗的小鸟6 的提醒,此为修正后的结果。)
其中,b_ij分别是关于a_ij的表达式,H中依然包含8个未知量。空间中的三维坐标,我们可以通过棋盘格的制作获取,像素平面中的坐标可以通过图像处理的方式(哈里斯角点检测,再基于梯度搜索的方式精确控制点位置)来获取,那么,两个方程8个未知量,所以我们至少需要四个点才可以求解出H,据说这也正是张教授为什么选择棋盘格的原因之一(尚待求证)。
至于,单应性矩阵与内外参数的关系:
这个很简单,回顾单应性矩阵,它代表世界坐标到像素坐标的投影,是相机的内参矩阵与相机的外参矩阵的乘积,内参矩阵包含5个参数,外参矩阵包含旋转角度参数3个,平移参数3个,总共11个参数,这个可以用来后期求外参。前期如果跳不出这个圈子,那么问题就复杂化了,而且不容易简化求解。
内参矩阵的求解:
有了单应性矩阵,我们便可以根据张教授给的内参矩阵的两个约束条件来求解相机内部参数。
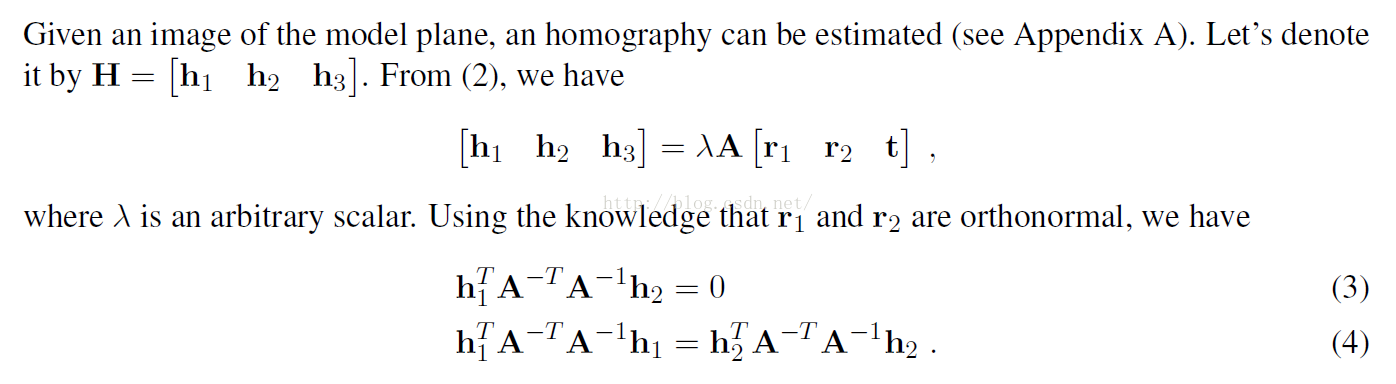
张教授说的很清楚,给一幅图像就可以估计出一个单应性矩阵H,然后利用旋转矩阵的性质,r_1 ,r_2正交得式(3),模相等得式(4),这个时候,两个方程5个未知数(相机内参),那么至少需要3幅图像方可求解,解的唯一性由尺度因子决定。
说到这里,问题一方基本搞清楚,如若不是被导师问的哑口无言,我也不会深究这些细节……深究的过程或许很痛苦,但每一次深入都会让我们达到新高度,别人问起才会更加坦荡更加胸有成竹,进而以不变应万变!
Q2:张正友标定法中的畸变矫正模型及求解?
A2:首先粗浅的聊一下畸变。这里所说的畸变主要指因镜片加工等不可抗拒因素导致的物方点在像方偏离其理想点。
小女子不才,如有说的不对的地方,希望大家见谅,批评指正哦~~谢谢^_^
持续更新中……














 575
575











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









