










在上一个博文中我有提到自制45度坐标转换
http://blog.csdn.net/stophin/article/details/19247903
这次是一个新的转换方法,旧版本在坐标转换上还存在一些问题,并且计算量大,这些都将在本博文中提到并解决。
45度坐标转换,说得简单一点就是将平面的矩形转换为斜面上的斜平行四边形,和其逆转换。有许多游戏是直接使用正方形到菱形的转换,
这只是这种转换的一个特例。那么为什么要做这种转换呢?因为平面矩形用于控制物体的位置,并且可以支撑更多的算法,例如A*寻路,
斜面则用于显示物体,并且可以根据物体贴图的参数来计算物体在平面上的几何尺寸。平面和斜面是息息相关的。
1.平面坐标到旋转坐标
首先有一个对齐普通坐标的矩形,可以将它看成任意物体的几何包围圈,或者更像是物体的上视图。将它绕原点旋转角度g,旋转后的坐标很容易计算:
对于矩形的任意顶点(x,y),转换成极坐标:
r = sqrt(x * x + y * y);
h = arctan(y / x);
x = r * cos(h); y = r * sin(h);
旋转角度g以后(顺时针):
x' = r * cos(h - g);
y = r * sin(h - g);
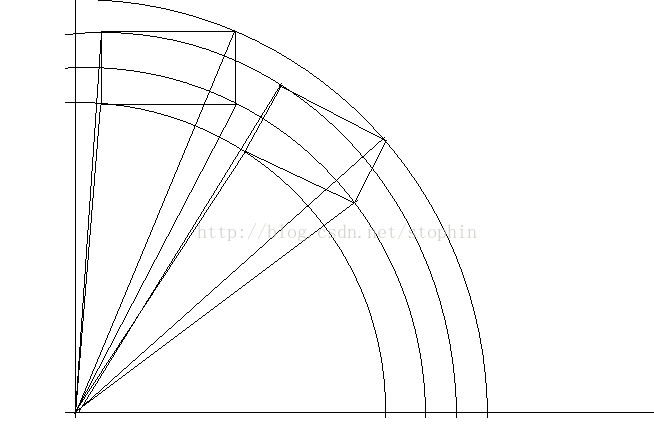
2.旋转坐标到斜面坐标
如图。旧版本采用先斜面再旋转的方法,在转换中需要两次用到椭圆公式,所以计算量增大,所以没有使用圆的公式来的方便。
新版本则使用先旋转再斜面,简单直观。这或许就是叫做逆向思维,编程就是需要这种思想,可以将复杂的事情变简单。
从旋转到斜面的计算公式,可以参考旧版本的平面系到斜面系的转换部分,因为虽然旋转过了,但旋转后的图形坐标仍然属于平面系,
可以直接映射到斜面系。
首先是图中蓝色部分:对于旋转后的矩形,取其各顶点y轴射影为椭圆半长轴,定椭圆离心率e,这样做出来的椭圆组就是一组平行椭圆。
斜面系有一个斜面y坐标(紫色线),和上面的椭圆组相交,拉取交点做平行x轴并与旋转矩形各顶点x轴射影线(绿色)相交的线(绿色),
交点连接成为最终的斜平行四边形(红色)。

公式参考(取自旧版本平面系到斜面系转换)

3.关于物体的几何计算
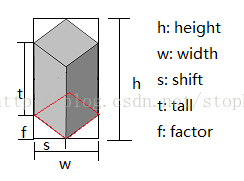
上图是一个典型的贴图。黑色矩形框为图片的大小,以左下角位坐标进行贴图。红色部分就是这个几何体的"占地面积",按上面两步进行逆向转换到平面系,红色部分就可以转换成集合体真实的几何尺寸,可以进行碰撞检测等等。计算真实几何尺寸有很多方法。我使用先转换在计算的方法:
左下角坐标:invTrans(x , y - f)
右下角坐标:invTrans(x + s, y)
右上角坐标:invTrans(x + w, y - (h - f - t))
其中invTrans就是逆向转换函数,传入的参数就是图上的红色部分的三个关键点(自己找找看)。
得到三个坐标后,就可以通过得到几何尺寸了。
4.图片的深度排序,视口剪切和一些其他的算法
图片的深度排序应该算是一大算法了。加上后面的A*算法,有时间的话会对这部分进行讨论。不过网上都有这些算法的讲解,我也是参照网上的做法,
想了解的朋友可以去搜索了解。
如果借助html的z-index和display属性,可以很好地对物体进行深度排序以及剪切。如果用C++来制作的话,需要在每一帧注意有哪些几何体需要渲染,这个可以用
一个渲染链表来实现,由链表顶端到下面深度依次递减,并且在视口外的集合体从链表中移除掉,重画时按链表依次渲染,就有了深度和剪切效果。
5.测试
然后最后是测试了,我用javascript写了一个引擎,点击打开链接
或者到我的网站主页http://www.stophin.com/ 游戏目录下找到RPG_new.html这个文件,打开就能用了。
测试画面有相应的截图。我还为这个引擎添加了A*寻路。左键或右键点击地图会进行寻路。
C++版本的也有一个测试,http://ww3.stophin.com/download 目录下面的Package.rar这个包。使用EGE进行图形绘制。

6.存在问题
上面测试例中,几何尺寸计算可以算是一个最大的问题。下图是测试时看到的状态,图中标明B或者A的就是物体的映射几何尺寸。可以看到A和它下面的B显然错位,
最主要还是因为几何尺寸计算中,shift, tall, shift在途中很难丈量精准,

更新:
以上网站已经不再维护,最新改进代码可以查看github:
https://github.com/stophin/Engine_EGE
README.md中有android版本和html版本的仓库连接
或者gitee
https://gitee.com/stophin/Nano
https://gitee.com/stophin/Engine_EGE
推荐gitee,毕竟国内网要比github国外网快一些。














 7188
7188











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









