







图像变形之线性保角变换
线性保角变换(Linear Conformal Transformation)是一种几何形状不变的变换。这种图像变形包括旋转,缩放和平移等。线性保角变换是仿射变换的子集,两者都是常见的空间图像变形。
下图首先给出了一幅旋转角度为45度,缩放系数为1.5,平移系数为0的线性保角变换的结果:
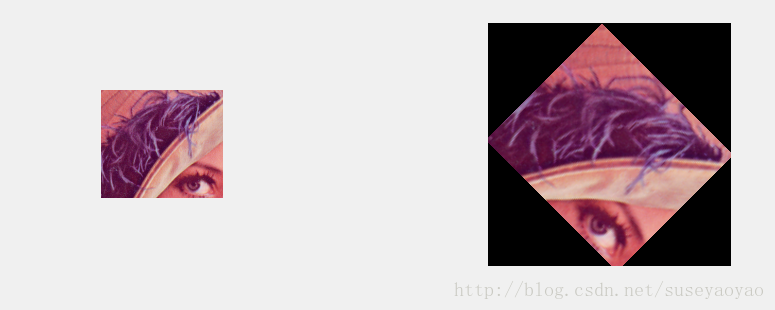
图1:线性保角变换
从上图可以看出线性保角变换可以看做是一种带缩放的旋转操作。由于平移(垂直方向,水平方向)只是改变图像的几何位置,这里没有体现出来。在图1中,假设原始图像中某一点的坐标为:(w,z),线性保角变换后的图像坐标为(x,y),那么有如下的图像变形公式:
 (1)
(1)
这里T就是变形矩阵,图1中,线性保角变换的变形矩阵T有如下形式:
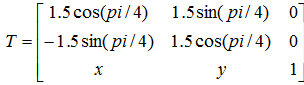 ,其中x,y是水平平移系数和垂直平移系数。这是线性保角变换的一般格式,角度和缩放倍数可以修改,由于图1中的线性保角变换没有对图像执行平移操作,也就是说x,y的值是0。即变形矩阵为:
,其中x,y是水平平移系数和垂直平移系数。这是线性保角变换的一般格式,角度和缩放倍数可以修改,由于图1中的线性保角变换没有对图像执行平移操作,也就是说x,y的值是0。即变形矩阵为: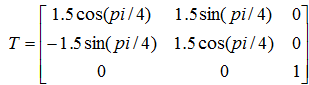
下面我们可以看看仅有旋转时的效果,如下图所示:

图2:图像旋转
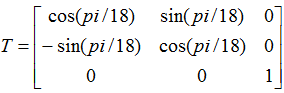
可以将图像旋转看做是图像线性保角度变换的子集,图2中图像像旋转的变形矩阵为:
 ,为了理解图像变形的变形矩阵为何是这种方式,我们可以将空域坐标转化到极坐标。如下图所示:
,为了理解图像变形的变形矩阵为何是这种方式,我们可以将空域坐标转化到极坐标。如下图所示: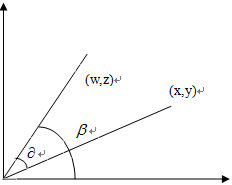
图3:极坐标系对照图
在极坐标系中,旋转之前的点(w,z)表示为:














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









