







原理:
灰度变化率有函数如下:
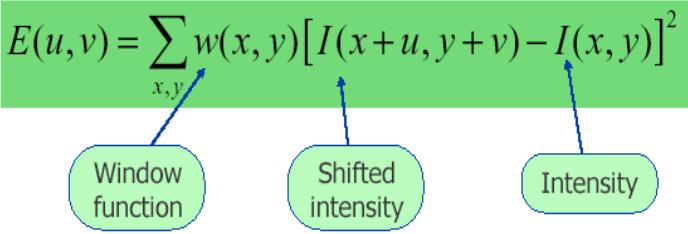
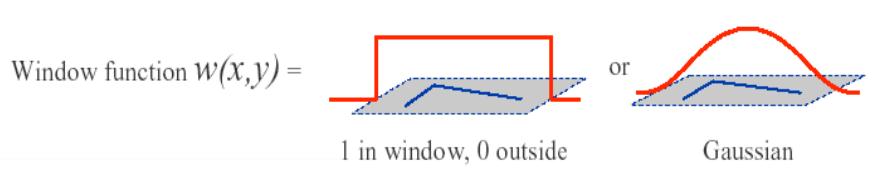
其中的W(x,y)函数如下
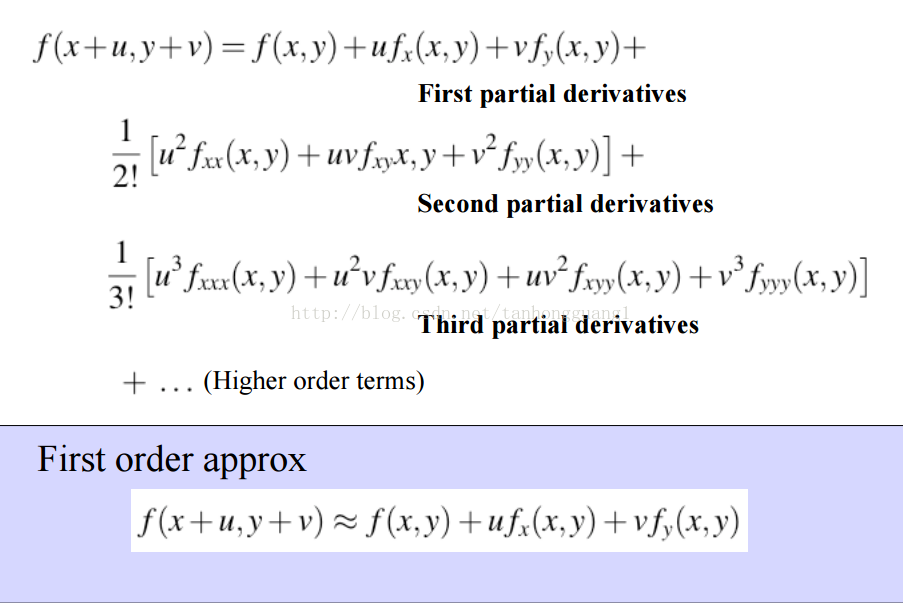
有函数f(x+u,y+v),则其泰勒展开为:
对图片pitch来说,套用刚刚的展开,我们想要计算patch和相邻patch的距离就是:
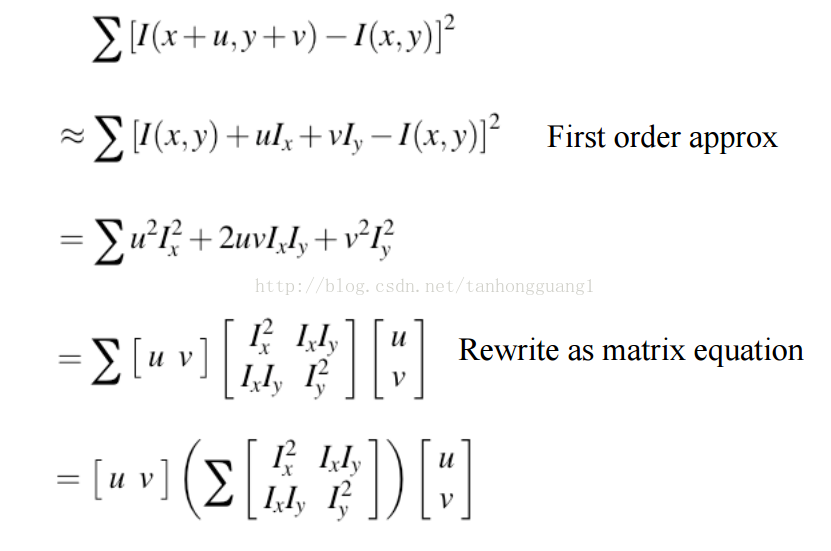
下面,让我们回到最开始的公式,并对中括号里的内容做相应展开:
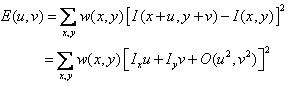
我们把W(x,y)和矩阵结合起来,用一个新的符号M来表示:

最开始公式就简化成了以下的形式:
以上就是Harris的公式推导。
Harris intuition:
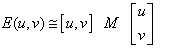
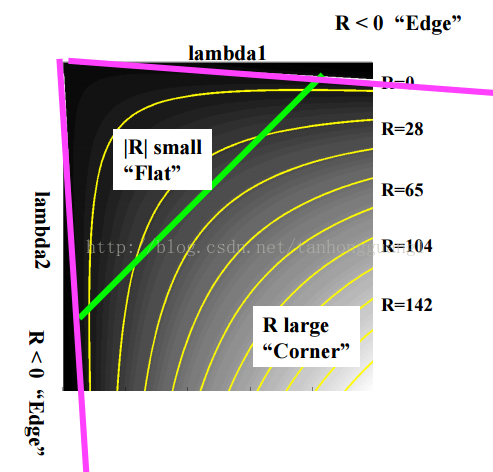
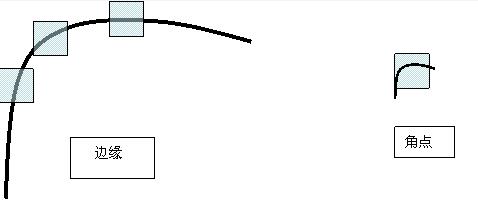
Harris采用了一种新的角点判定方法。矩阵M的两个特征向量l1和l2与矩阵M的主曲率成正比。Harris利用l1, l2来表征变化最快和最慢的两个方向.若两个都很大就是角点,一个大一个小就是边缘,两个都小就是在变化缓慢的图像区域.
图1- 4用矩阵M的特征向量分类图像像素点
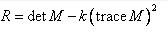
但是解特征向量需要比较多的计算量,且两个特征值的和等于矩阵M的迹,两个特征值的积等于矩阵M的行列式。所以用(1-4)式来判定角点质量。(k常取0.04-0.06)
R在两个特征值平面上的梯度表示如下:
Harris算法实现
Step 1:对每一像素点计算相关矩阵M。


Step 2:计算每像素点的Harris 角点响应。

Step 3.在w*w范围内寻找极大值点,若Harris 角点响应大于阀值,则视为角点。
Harris算子对灰度的平移是不变的,因为只有差分,对旋转也有不变性,但是对尺度很敏感,在一个尺度下是角点, 在在另一个尺度下可能就不是了.
编程实现:
fx = [-1 0 1;-1 0 1;-1 0 1]; % 高斯函数一阶微分,x方向(用于改进的Harris角点提取算法)
%fx = [-2 -1 0 1 2]; % x方向梯度算子(用于Harris角点提取算法)
Ix = filter2(fx,ori_im); % x方向滤波
fy = [-1 -1 -1;0 0 0;1 1 1]; % 高斯函数一阶微分,y方向(用于改进的Harris角点提取算法)
% fy = [-2;-1;0;1;2]; % y方向梯度算子(用于Harris角点提取算法)
Iy = filter2(fy,ori_im); % y方向滤波 3)考虑到图像一般情况下的噪声影响,采用高斯滤波去除噪声点。
Ix2 = Ix.^2;
Iy2 = Iy.^2;
Ixy = Ix.*Iy;
clear Ix;
clear Iy;
h= fspecial('gaussian',[7 7],2); % 产生7*7的高斯窗函数,sigma=2
Ix2 = filter2(h,Ix2);
Iy2 = filter2(h,Iy2);
Ixy = filter2(h,Ixy); 4)计算角点的准则函数R(即用一个值来判断该点来衡量这个点是否是角点),并标记角点(R(i,j)>0.01*Rmax,且R(i,j)为3x3邻域局部最大值)。
M = [Ix2(i,j) Ixy(i,j);Ixy(i,j) Iy2(i,j)];
R(i,j) = det(M)-k*(trace(M))^2; % 计算R
【可以通过改变准则函数的计算来改进harris算法,上式中的k一般取0.04~0.06】
[height,width] = size(ori_im);
result = zeros(height,width); % 纪录角点位置,角点处result的值为1
R = zeros(height,width);
Rmax = 0; % 图像中最大的R值
for i = 1:height
for j = 1:width
M = [Ix2(i,j) Ixy(i,j);Ixy(i,j) Iy2(i,j)];
R(i,j) = det(M)-0.06*(trace(M))^2;
if R(i,j) > Rmax
Rmax = R(i,j);
end
end
end
cnt = 0; %角点个数
for i = 2:height-1
for j = 2:width-1
% 进行非极大抑制,窗口大小3*3
if R(i,j) > 0.01*Rmax && R(i,j) > R(i-1,j-1) && R(i,j) > R(i-1,j) && R(i,j) > R(i-1,j+1) && R(i,j) > R(i,j-1) && R(i,j) > R(i,j+1) && R(i,j) > R(i+1,j-1) && R(i,j) > R(i+1,j) && R(i,j) > R(i+1,j+1)
result(i,j) = 1;
cnt = cnt+1;
end
end
end
[posc, posr] = find(result == 1);
disp(cnt); % 显示角点个数
imshow(ori_im);
hold on;
plot(posr,posc,'r+'); 以上信息来源:
详细原理及公式推导http://www.cse.psu.edu/~rcollins/CSE486/lecture06.pdf
算法精讲及总结http://blog.163.com/zhaowei0425@126/blog/static/47586030201132611115984/
编程实现http://www.cnblogs.com/blue-lg/archive/2011/12/17/2291139.html














 1748
1748











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









