









lsd直线检测算法
LSD是一种直线检测分割算法,它能在线性的时间内得出亚像素级精度的检测结果。该算法被设计成可以在任何数字图像上都无需参数调节。
参考:http://blog.csdn.net/lien0906/article/details/38417191
1、lsd算法的步骤(未完)
LSD算法的步骤如下:
- 1、图像缩放
- 2、梯度计算
- 3、梯度排序
- 4、阈值检测
- 5、区域增长
- 6、矩形近似
下面分别介绍每一个步骤:
1、图像缩放
2、梯度计算
3、梯度排序
4、阈值检测
5、区域增长
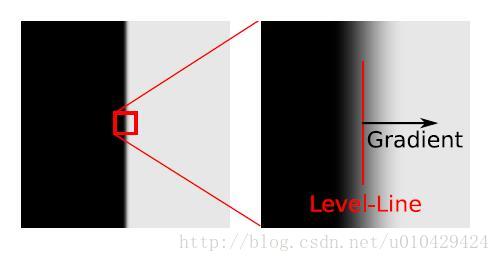
计算每个像素点8-邻域内level-line的角度,如果某个像素点的level-line角度与区域内平均的level-line角度相近(小于22.5°),则将该像素点加入到区域中,并重新计算区域内的平均level-line角度。
如下图所示:LSD算法将线段看做一小段图像区域,在这个区域中,图像的灰度发生剧烈变化,灰度变化的方向为梯度方向(Gradient),与梯度方向垂直的方向为线段方向(Level-Line)。
6、矩形近似
使用矩形覆盖区域,区域的质心就是矩形的中心。
2、lsd源码分析
3、实例
这个Demo用到的测试图像是:

下面的代码,部分参考自:OpenCV官网
lsd_lines.cpp
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
string path = "images/test3.jpg";
Mat image = imread(path, IMREAD_GRAYSCALE);
blur(image, image, Size(3,3)); // 使用3x3内核来降噪
Canny(image, image, 50, 200, 3); // Apply canny edge
// Create and LSD detector with standard
/*
LSD_REFINE_NONE,没有改良的方式;
LSD_REFINE_STD,标准改良方式,将带弧度的线(拱线)拆成多个可以逼近原线段的直线度;
LSD_REFINE_ADV,进一步改良方式,计算出错误警告数量,通过增加精度,减少尺寸进一步精确直线。
*/
Ptr<LineSegmentDetector> ls = createLineSegmentDetector(LSD_REFINE_STD);
double start = double(getTickCount());
vector<Vec4f> lines_std;
// Detect the lines
ls->detect(image, lines_std);
// Show found lines
Mat drawnLines(image);
ls->drawSegments(drawnLines, lines_std);
Mat only_lines(image.size(), image.type());
ls->drawSegments(only_lines, lines_std);
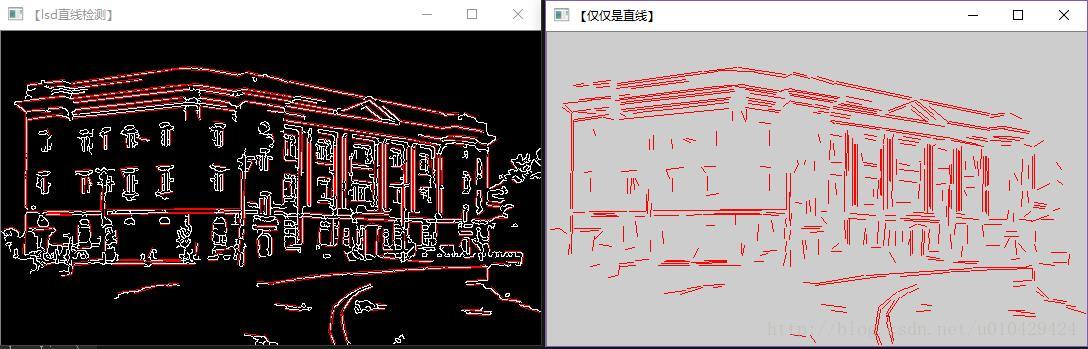
imshow("【lsd直线检测】", drawnLines);
imshow("【仅仅是直线】", only_lines);
waitKey(0);
return 0;
}
结果图分析
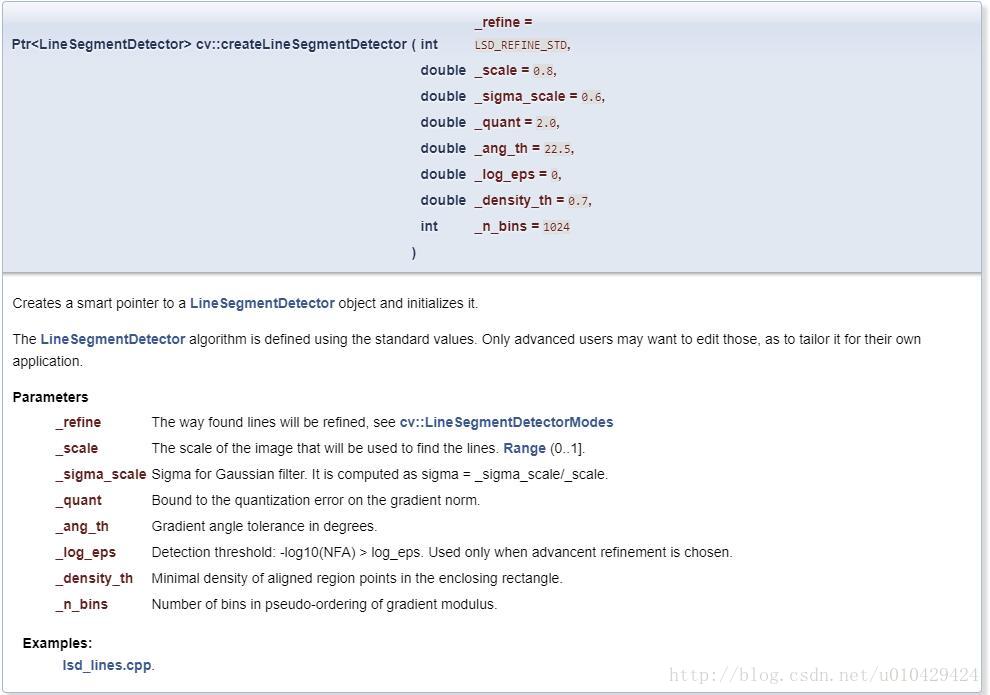
程序首先对源图像滤波降噪,然后使用canny边缘检测算法,提取图像中的边缘。接着创建LineSegmentDetector对象的智能指针并初始化,用于直线检测。
最后,将检测到的直线绘制出来。
createLineSegmentDetector的函数说明如下:














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









