







并行求pi(练习规约)
这个例子比较好。考察了对于各级内存的使用。实质就是数据规约。
注意:
(1)动态申请share memory空间时,需要在<<< >>>的第3个参数处指明空间大小(当然,不能超过share memory的总大小)。然后再kernel函数里,用的时候直接,这样使用:
·extern float __shared__ s_pi[];//
代码:
/*
calculate PI: the usage of reduction.
author:riesman
date: 2017.3.2
*/
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
//for cuda.
#include <cuda_runtime.h>
#include <helper_cuda.h>
#define EPS 1e-3
/* devide kernel*/
__global__ void
innerBlockReduction(float *sum, int num){
int id = blockDim.x * blockIdx.x + threadIdx.x;
int gid = id;
float temp;
int gap;
//TODO:OK
//float __shared__ s_pi[256];//len is:blockDim
extern float __shared__ s_pi[];//len is:blockDim
s_pi[threadIdx.x] = 0.f;
while(gid < num){
#if 0
s_pi[threadIdx.x] += 1;
#endif
#if 1
temp = (gid+0.5f)/num;//horizotal coordicate.
s_pi[threadIdx.x] += 4.f/(1+temp*temp);
#endif
gid += blockDim.x * gridDim.x;
}
gap = blockDim.x >> 1;
for(; gap>0; gap >>= 1){
if(threadIdx.x < gap){
s_pi[threadIdx.x] += s_pi[threadIdx.x + gap];
}
__syncthreads();
}
if(threadIdx.x == 0){
sum[blockIdx.x] = s_pi[0];
//printf("sum[%d]=%f\n",blockIdx.x, sum[blockIdx.x]);
}
}
__global__ void
interBlockReduction(float *sum, int num){
int id = threadIdx.x;
int gap;
extern float __shared__ buffer[];
buffer[id] = sum[id];
__syncthreads();
for(gap = (blockDim.x/2); gap>0; gap=(gap/2)){
if(threadIdx.x < gap){
buffer[threadIdx.x] += buffer[threadIdx.x + gap];
}
__syncthreads();
}
if(threadIdx.x == 0){
//TODO;
//*pi = buffer[0];
sum[0] = buffer[0]/num;
//printf("sum:%f\n", buffer[0]);
}
}
/*host kernel */
float cpuPI(int num){
float sum = 0.f;
int i;
float temp;
for(i=0; i<num; i++){
temp = (i+0.5f)/num;//horizotal coordicate.
sum += 4/(1+temp*temp);
// printf("%f\n", sum);
}
return sum/num;
//return sum;
}
void dealError(cudaError_t* err){
if(*err != cudaSuccess){
printf("%s\n", cudaGetErrorString(cudaGetLastError()));
exit(0);
}
}
int main(){
int num = 1024;
float serialPI = 0.f;
float parallelPI= 0.f;
cudaError_t err = cudaSuccess;
int threadsPerBlock = 256;
//int blocksPerGrid = (num + threadsPerBlock - 1 )/threadsPerBlock;
int blocksPerGrid = num/threadsPerBlock;
printf("blocknum:%d\n", blocksPerGrid);
/*allocate device memory */
float *d_A = NULL;
int size = blocksPerGrid * sizeof(float);
err = cudaMalloc((void ** )&d_A, size);
dealError(&err);
innerBlockReduction<<<blocksPerGrid, threadsPerBlock, sizeof(float)*threadsPerBlock>>>(d_A, num);
err = cudaGetLastError();
dealError(&err);
#if 0
err = cudaMemcpy(h_A, d_A, size, cudaMemcpyDeviceToHost);
dealError(&err);
#endif
int threadsPerBlock2 = blocksPerGrid;
int blocksPerGrid2 = 1;
interBlockReduction<<<blocksPerGrid2, threadsPerBlock2, sizeof(double)*threadsPerBlock2>>>(d_A, num);
//interBlockReduction<<<blocksPerGrid2, threadsPerBlock2>>>(d_A, num, ¶llelPI);
#if 0
err = cudaMemcpy(¶llelPI, &d_parallelPI, sizeof(float), cudaMemcpyDeviceToHost);
dealError(&err);
#endif
#if 1
err = cudaMemcpy(¶llelPI, &d_A[0], sizeof(float), cudaMemcpyDeviceToHost);
dealError(&err);
#endif
/* result validation */
serialPI = cpuPI(num);
printf("serialPI:%f\n", serialPI);
printf("parallelPI:%f\n", parallelPI);
if(fabs(serialPI - parallelPI) > EPS){
printf("have error!\n");
}else
printf("no error!\n");
/* free */
err = cudaFree(d_A);
dealError(&err);
return 0;
}
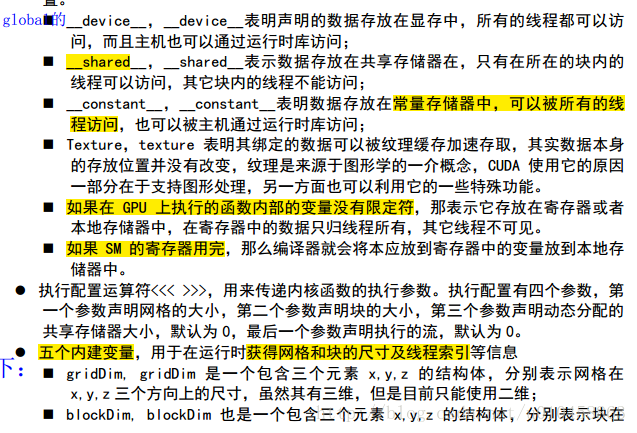
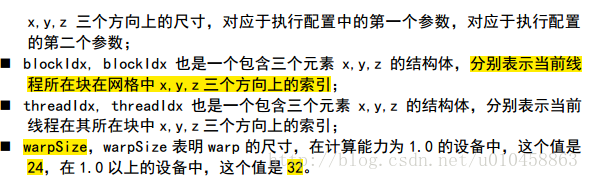
变量的类型















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









