







SSD: Single Shot MultiBox Detector
背景介绍
基于“Proposal + Classification” 的 Object Detection 的方法,R-CNN 系列(R-CNN、SPPnet、Fast R-CNN 以及 Faster R-CNN),取得了非常好的结果,但是在速度方面离实时效果还比较远
在提高 mAP 的同时兼顾速度,逐渐成为 Object Detection 未来的趋势。在之前的 博客 YOLO,提到的方法 YOLO 虽然能够达到实时的效果,但是其 mAP 与刚面提到的 state of art 的结果有很大的差距。上篇博文中简单分析了一下 YOLO 的缺陷:每个网格只预测一个物体,容易造成漏检;对于物体的尺度相对比较敏感,对于尺度变化较大的物体泛化能力较差。
针对 YOLO 中的这些不足,该论文提出的方法 SSD 在这两方面都有所改进,同时兼顾了 mAP 和实时性的要求。在满足实时性的条件下,接近 state of art 的结果。对于输入图像大小为 300*300 在 VOC2007 test 上能够达到 58 帧每秒( Titan X 的 GPU ),72.1% 的 mAP。输入图像大小为 500 *500 , mAP 能够达到 75.1%。
论文概要
该论文提出的网络框架也是基于传统的用于分类的基础网络结构,如 AlexNet、VGG等,使用通用的结构(如前 5个conv 等)作为基础网络,然后在这个基础上增加其他的层。这些增加的卷积层的 feature map 的大小变化比较大,允许能够检测出不同尺度下的物体。对于通过卷积操作得到的 feature map 上的每个点,按照不同的 scale 和 ratio 生成,k 个 default boxes,这种结构有点类似于 Faster R-CNN 中的 Anchor。
新增加的每个卷积层的 feature map 都会通过一些小的卷积核操作,得到对于相应的 default boxes 对于不同物体类别 ( c1,c2,…,cp ) 的偏移 (shape offsets) 以及其置信度。在 size 为 m*n, 通道数为 p 的 feature map 上,使用的卷积核大小为 3*3*p,如果 feature map 上的每个点对应 k 个 default boxes,物体的类别数为 c,那么就需要使用 (c+4)k 个这样的卷积滤波器,最后有 (c+4)kmn 个输出。
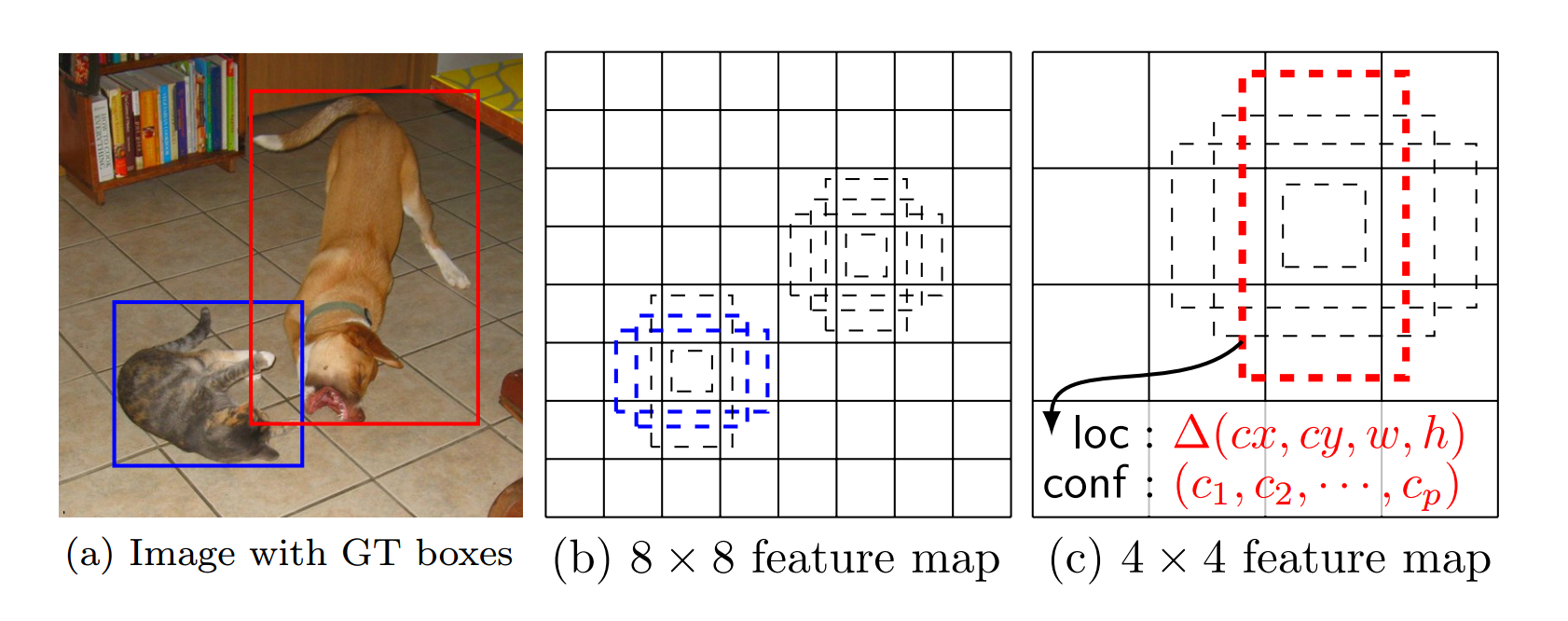
在训练阶段,给定输入图像,以及每个物体的 ground truth。每个 default box 与 任意一个 ground truth 的 IOU 大于 0.5,就表示匹配好,作为正样本,其他的作为负样本。这样的话,一个 ground truth 可能对应多个 default box。下图的例子是:给定输入图像,及 ground truth,分别在两种不同尺度(feature map 的大小为 8*8,4*4)下的匹配情况。有两个 default box 与猫匹配(8*8),一个 default box 与狗匹配(4*4)。在预测阶段,直接预测每个 default box 的偏移以及对于每个类别相应的得分。最后通过 nms 的方式得到最后检测结果。
网络结构
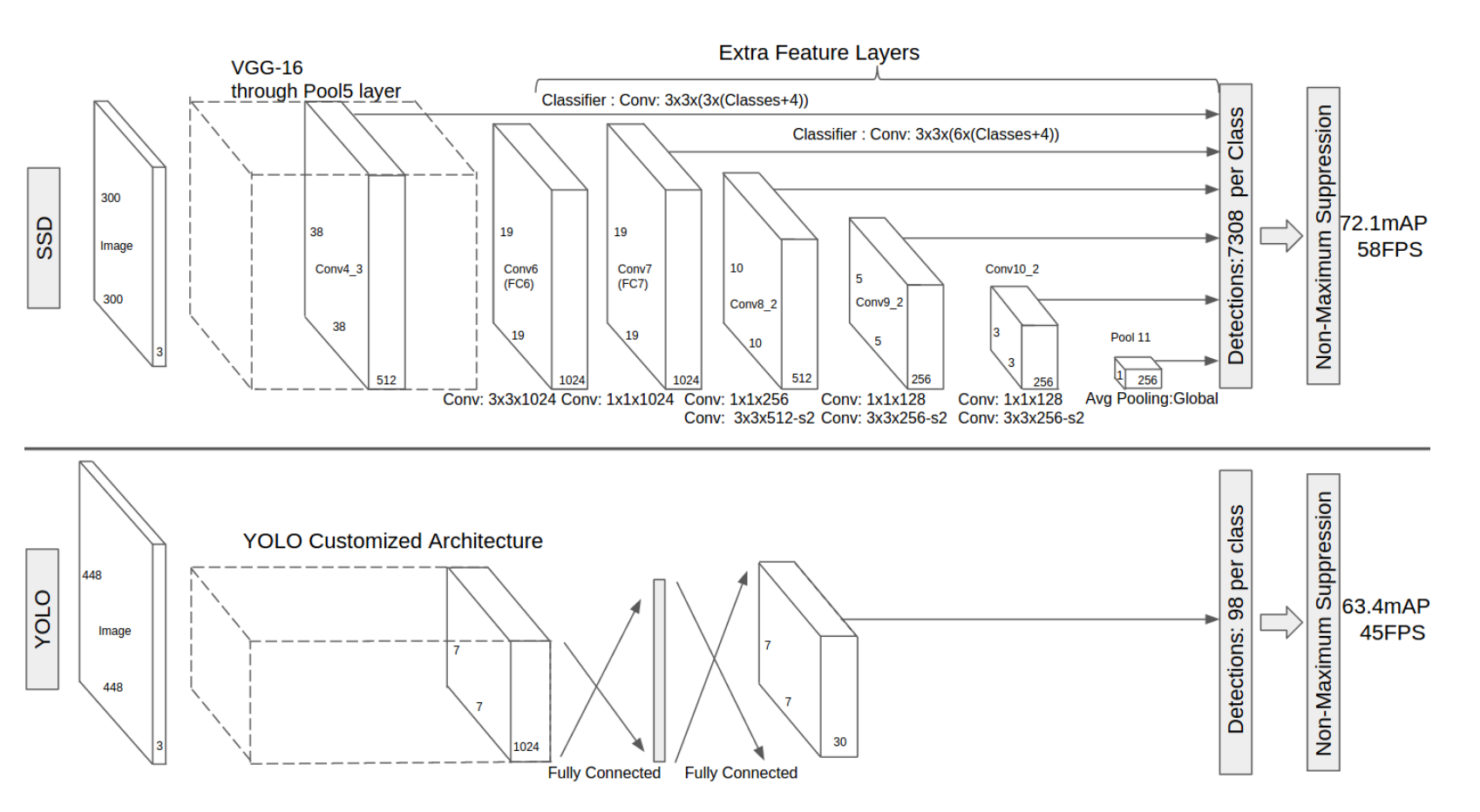
该论文采用 VGG16 的基础网络结构,使用前面的前 5 层,然后利用 astrous 算法将 fc6 和 fc7 层转化成两个卷积层。再格外增加了 3 个卷积层,和一个 average pool层。不同层次的 feature map 分别用于 default box 的偏移以及不同类别得分的预测,最后通过 nms得到最终的检测结果。给出的是 SSD 和 YOLO 的对比网络结构。
训练策略
该论文是在 ImageNet 分类和定位问题上的已经训练好的 VGG16 模型中 fine-tuning 得到,使用 SGD,初始学习率为 10−3 , 冲量为 0.9,权重衰减为 0.0005,batchsize 为 32。不同数据集的学习率改变策略不同。新增加的卷积网络采用 xavier 的方式进行初始化。
目标函数
训练的目标函数,和常见的 Object Detection 的方法目标函数相同,分为两部分:计算相应的 default box 与目标类别的 score(置信度),以及相应的回归结果(位置回归)。置信度是采用 Softmax Loss,位置回归则是采用 Smooth L1 loss。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 6814
6814











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









