









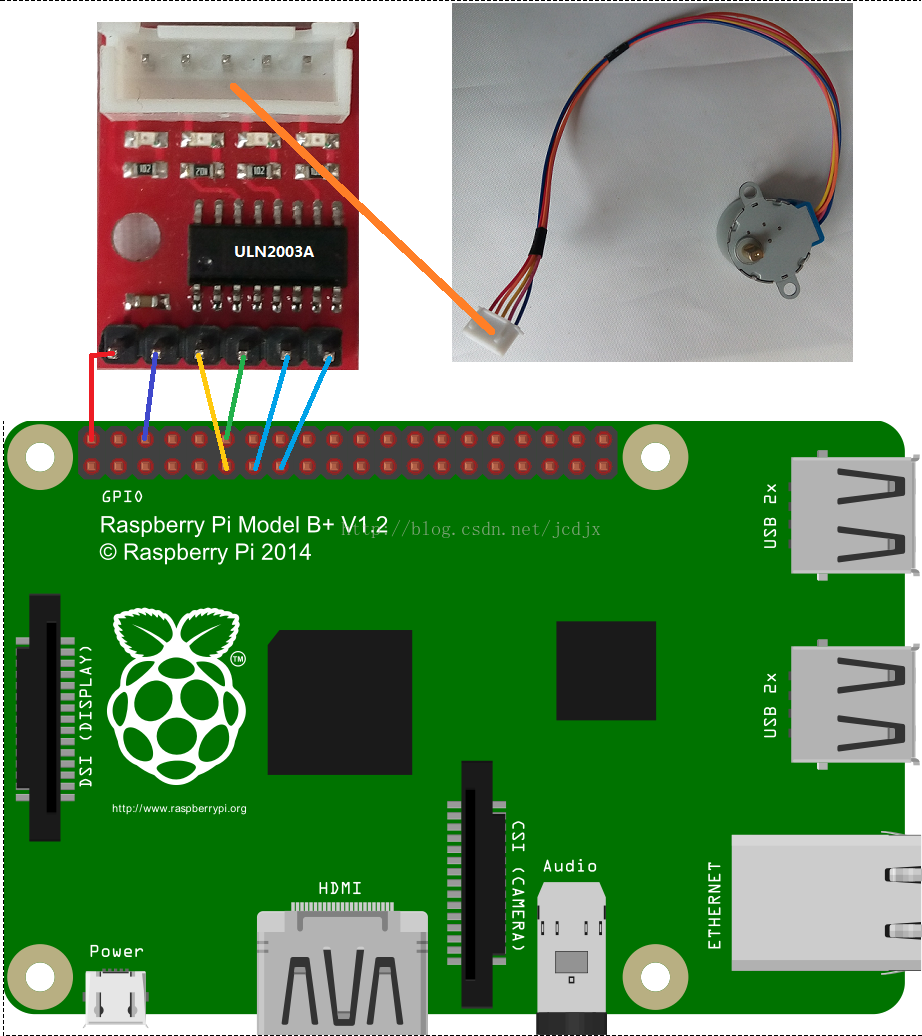
步进电机的优点在于它能够被精确定位,正向或反向一次性转动“一步”,并且也能够连续转动。本次实验,我们选用的舵机驱动芯片是ULN2003A,ULN2003 是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成。为了方便起见,我们用了ULN2003A模块,电路连接方式如下图:
#!/usr/bin/env python
#########################################################
# File name: stepMotor.py
# Author: Jason Dai
# Date: 2015/01/26
#########################################################
import RPi.GPIO as GPIO
import time
IN1 = 11 # pin11
IN2 = 12
IN3 = 13
IN4 = 15
def setStep(w1, w2, w3, w4):
GPIO.output(IN1, w1)
GPIO.output(IN2, w2)
GPIO.output(IN3, w3)
GPIO.output(IN4, w4)
def stop():
setStep(0, 0, 0, 0)
def forward(delay, steps):
for i in range(0, steps):
setStep(1, 0, 0, 0)
time.sleep(delay)
setStep(0, 1, 0, 0)
time.sleep(delay)
setStep(0, 0, 1, 0)
time.sleep(delay)
setStep(0, 0, 0, 1)
time.sleep(delay)
def backward(delay, steps):
for i in range(0, steps):
setStep(0, 0, 0, 1)
time.sleep(delay)
setStep(0, 0, 1, 0)
time.sleep(delay)
setStep(0, 1, 0, 0)
time.sleep(delay)
setStep(1, 0, 0, 0)
time.sleep(delay)
def setup():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(IN1, GPIO.OUT) # Set pin's mode is output
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
def loop():
while True:
print "backward..."
backward(0.003, 512) # 512 steps --- 360 angle
print "stop..."
stop() # stop
time.sleep(3) # sleep 3s
print "forward..."
forward(0.005, 512)
print "stop..."
stop()
time.sleep(3)
def destroy():
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child function destroy() will be executed.
destroy()
运行程序:
python stepMotor.py














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









