







原博客http://blog.csdn.net/yb536/article/details/41050181点击打开链接
1.数据矩阵单位化
方法一:
输出结果:
Y =
0.3974 0.4932 0.3959 0.5290 0.4941 0.4601 0.4422 0.4890
0.3863 0.6247 0.5292 0.5437 0.4936 0.6074 0.5961 0.5471
0.4738 0.3464 0.3823 0.3327 0.4146 0.3922 0.3360 0.3591
0.4608 0.3470 0.4201 0.3810 0.4100 0.3789 0.3945 0.4176
0.5060 0.3552 0.4905 0.4108 0.4149 0.3493 0.4249 0.3977
0.3974 0.4932 0.3959 0.5290 0.4941 0.4601 0.4422 0.4890
0.3863 0.6247 0.5292 0.5437 0.4936 0.6074 0.5961 0.5471
0.4738 0.3464 0.3823 0.3327 0.4146 0.3922 0.3360 0.3591
0.4608 0.3470 0.4201 0.3810 0.4100 0.3789 0.3945 0.4176
0.5060 0.3552 0.4905 0.4108 0.4149 0.3493 0.4249 0.3977
方法二:
输出结果:
Y =
0.3974 0.4932 0.3959 0.5290 0.4941 0.4601 0.4422 0.4890
0.3863 0.6247 0.5292 0.5437 0.4936 0.6074 0.5961 0.5471
0.4738 0.3464 0.3823 0.3327 0.4146 0.3922 0.3360 0.3591
0.4608 0.3470 0.4201 0.3810 0.4100 0.3789 0.3945 0.4176
0.5060 0.3552 0.4905 0.4108 0.4149 0.3493 0.4249 0.3977
结果同上。
0.3974 0.4932 0.3959 0.5290 0.4941 0.4601 0.4422 0.4890
0.3863 0.6247 0.5292 0.5437 0.4936 0.6074 0.5961 0.5471
0.4738 0.3464 0.3823 0.3327 0.4146 0.3922 0.3360 0.3591
0.4608 0.3470 0.4201 0.3810 0.4100 0.3789 0.3945 0.4176
0.5060 0.3552 0.4905 0.4108 0.4149 0.3493 0.4249 0.3977
结果同上。
2.数据矩阵归一化
归一化,将不同样本的同一维度的数据归一化。
函数:mapminmax
默认规范范围(-1,1)
若想将规范范围划为(0,1),可编写Y=mapminmax(A,0,1);
此函数规整行向量中最大最小值,如果运用此函数,则A矩阵每一行为一个维度,每一列是一个样本。
输出结果:
Y =
0.1553 1.0000 0.1710 0.2889 0.4567 0.2388 0 0.2982
0.1035 1.0000 0.1806 0.2215 0.3465 0.2486 0 0.2545
0.2983 1.0000 0.2521 0.2498 0.5542 0.2983 0 0.3112
0.2806 1.0000 0.2748 0.2867 0.5417 0.2783 0 0.3643
0.3036 1.0000 0.3208 0.3032 0.5330 0.2410 0 0.3317
0.1553 1.0000 0.1710 0.2889 0.4567 0.2388 0 0.2982
0.1035 1.0000 0.1806 0.2215 0.3465 0.2486 0 0.2545
0.2983 1.0000 0.2521 0.2498 0.5542 0.2983 0 0.3112
0.2806 1.0000 0.2748 0.2867 0.5417 0.2783 0 0.3643
0.3036 1.0000 0.3208 0.3032 0.5330 0.2410 0 0.3317
规范范围为(-1,1)
输出结果:
Y =
-0.6894 1.0000 -0.6581 -0.4222 -0.0867 -0.5224 -1.0000 -0.4037
-0.7929 1.0000 -0.6388 -0.5569 -0.3070 -0.5027 -1.0000 -0.4910
-0.4033 1.0000 -0.4958 -0.5004 0.1084 -0.4033 -1.0000 -0.3776
-0.4388 1.0000 -0.4503 -0.4266 0.0833 -0.4434 -1.0000 -0.2714
-0.3928 1.0000 -0.3583 -0.3936 0.0660 -0.5180 -1.0000 -0.3366
-0.6894 1.0000 -0.6581 -0.4222 -0.0867 -0.5224 -1.0000 -0.4037
-0.7929 1.0000 -0.6388 -0.5569 -0.3070 -0.5027 -1.0000 -0.4910
-0.4033 1.0000 -0.4958 -0.5004 0.1084 -0.4033 -1.0000 -0.3776
-0.4388 1.0000 -0.4503 -0.4266 0.0833 -0.4434 -1.0000 -0.2714
-0.3928 1.0000 -0.3583 -0.3936 0.0660 -0.5180 -1.0000 -0.3366
3.数据矩阵标准化
标准化的数据均值为0,标准差为1
标准化函数zscore(x)
就是原数据减去均值,再除以标准差(无偏估计)
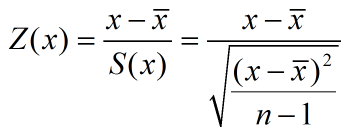
即Z=(x-mean(x))./std(x);
输出结果:
Y =
-0.9261 0.4840 -0.7522 0.9640 1.1002 0.2177 0.0358 0.6225
-1.1419 1.5457 1.3487 1.1224 1.0886 1.6449 1.6257 1.3944
0.5651 -0.7020 -0.9653 -1.1488 -0.6967 -0.4395 -1.0614 -1.1023
0.3100 -0.6969 -0.3702 -0.6294 -0.8011 -0.5685 -0.4568 -0.3254
1.1929 -0.6308 0.7390 -0.3081 -0.6909 -0.8547 -0.1433 -0.5892
-0.9261 0.4840 -0.7522 0.9640 1.1002 0.2177 0.0358 0.6225
-1.1419 1.5457 1.3487 1.1224 1.0886 1.6449 1.6257 1.3944
0.5651 -0.7020 -0.9653 -1.1488 -0.6967 -0.4395 -1.0614 -1.1023
0.3100 -0.6969 -0.3702 -0.6294 -0.8011 -0.5685 -0.4568 -0.3254
1.1929 -0.6308 0.7390 -0.3081 -0.6909 -0.8547 -0.1433 -0.5892
也可以按照上面的公式:
输出结果:
Y =
-0.9261 0.4840 -0.7522 0.9640 1.1002 0.2177 0.0358 0.6225
-1.1419 1.5457 1.3487 1.1224 1.0886 1.6449 1.6257 1.3944
0.5651 -0.7020 -0.9653 -1.1488 -0.6967 -0.4395 -1.0614 -1.1023
0.3100 -0.6969 -0.3702 -0.6294 -0.8011 -0.5685 -0.4568 -0.3254
1.1929 -0.6308 0.7390 -0.3081 -0.6909 -0.8547 -0.1433 -0.5892
和以上结果一致。
-0.9261 0.4840 -0.7522 0.9640 1.1002 0.2177 0.0358 0.6225
-1.1419 1.5457 1.3487 1.1224 1.0886 1.6449 1.6257 1.3944
0.5651 -0.7020 -0.9653 -1.1488 -0.6967 -0.4395 -1.0614 -1.1023
0.3100 -0.6969 -0.3702 -0.6294 -0.8011 -0.5685 -0.4568 -0.3254
1.1929 -0.6308 0.7390 -0.3081 -0.6909 -0.8547 -0.1433 -0.5892
和以上结果一致。














 791
791











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









