







魔方颜色识别和魔方复原算法以及串口通信都解决完了,感觉自己该松口气了吧,结构可以反正仿照别人的来嘛,做出来就的了,事实又打了我一耳光。我怎么发现我的预判总是那么的不靠谱,总结就是自己没做过的东西再也不要说很简单了,即使看上去简单的再也不能简单了。魔方机器人在调试的过程中颜色识别稳定性和魔方机器人的结构稳定性,感觉是影响魔方机器人稳定性最主要的问题,不是机械专业的,结构上感觉没办法讲究了,就是自己各种尝试,由最初看到网上的类似的做魔方的视频,照着葫芦画瓢,心想人家是做出来好吧,照着人家的做肯定没问题吧。有些事都不是想当然的认为的,一方面人家的加工精度可能比你高,很多细节你控制不了。另一个就是做的过程中可能会发现结构中的缺陷,这些都是在做之前考虑不到的,做了之后在知道自己做不做的来。
最后没办法无奈的放弃了第一种方案,经历了第一个方案,感觉自己手很笨,所以感觉还是做简单点的吧,结构简单一点,看能看上去不是很炫但是很实用啊,可靠性也会提高。穷人嘛,没办法,只能在周围找资源了,抽屉的两侧的导轨进入了我的视线,打算试一下(之所以说试一下,一是感觉旋转魔方的舵机可能不好固定,一是尺寸的问题,二是导轨是铁的打孔也不好打,三就是推进舵机如何推进导轨,如何连接),没有别的选了只能试一下了,
旋转舵机固定问题:巧的是旋转舵机尺寸和导轨的宽度是一样的,这样就对舵机的固定好处多多了,不好打孔,最后打算用绝缘胶布固定,你别说,还很结实,之前对这种用胶布固定东西的想法非常不认同,感觉固定住吗,毫无疑问,肯定不如螺丝固定结实,强度高。但是任何事情都有适用的范围,对于受力不是很多的地方,用胶布未尝不可(PS:蟒蛇肉肉的吧,不是照样能勒死人吗?)。事实证明效果还不错。

推进舵机和导轨的衔接:对于推进舵机和导轨的链接,仔细的观察了一下窗户的导轨结构,也就是如何将旋转运动转换为直线运动,含有两个固定点,固定点要是活的,方便旋转,一个固定点在旋转侧,另个在直线侧。后面发现公交车的车门也是差不多的远离,后面的和前面的门还是不一样的机构。但是都是实现如旋转运动转换为直线运动,很神奇,感觉。


再就是魔方机器人整体架子的稳定性了,因为条件的限制,我在周围找到了四个高度和大小的差不多的木块来固定四个导轨,当时自己还很得意,因为这样的话,导轨和导轨之间的距离什么的都是可以随意的调节的,移动一下木块不就得了吗。后来就哭了,因为在旋转魔方的过程中,为了保证魔方是固定不动的,这样在旋转的时候才能准确。这样就要求推进舵机要用力的卡在魔方上,就不可避免的影响其他的固定魔方的导轨的位置,位置变了,很多参数就得相应的调整,所以以后还是做最好还是一个整体稳定性比较好。省去了很多固定的麻烦。
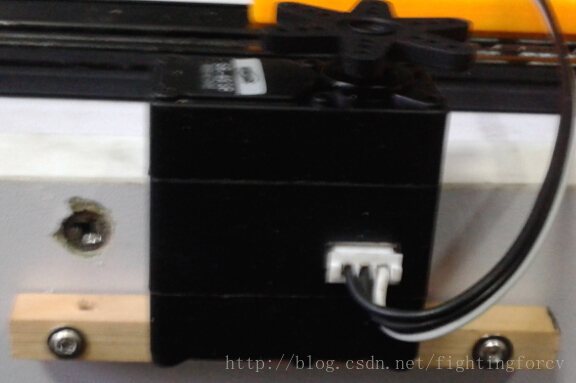
旋转舵机的选取选择3kg以上的比较好,如果力太小的话,我用的是2.2Kg,明显感觉到有时候力度不够,只要阻力稍大,就抓不动了,推进舵机力度也不能太小,因为要不魔方加持不住,我用的是403P,力度很大力矩12Kgcm,感觉有点大才小用了。以后可以选的小一点。
对于加持装置,之前买了木条和塑料条,塑料条自己有孔,由于有电钻,就用了木条,打孔随意些,加持装置最好保证和魔方有尽量多的接触面积,这样能有效的减少偏差,并且要外侧宽,内侧窄,这样能保证魔方没位置有小的偏差,也能加持的住,并且随着舵机的推进,还有对魔方状态进行纠正的好处。
另外提一点就是在进行旋转控制的时候,最好将推进舵机退一下,这样对应的该面的旋转摩擦力会小一些,方编旋转。















 1734
1734











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











