






在实际的监控系统中,面对的监控对象都会同时存在多个。目标的跟踪等价于在连续的图像帧之间创建基于位置、速度、形状、纹理、色彩等特征的对应匹配的问题,对于单个目标, 可以通过获得目标在每一帧中的位置得到运动轨迹, 即建立跟踪。但对于多个目标, 情况较为复杂, 在运动目标遮挡、暂时消失等情况下目标信息丢失使跟踪失败。
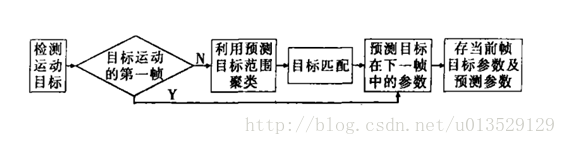
多目标跟踪系统结构图
跟踪分为两个步骤,首先对目标进行数据关联,形成目标的航迹,可采用MHT算法。然后根据每个目标历史的位置信息,利用Kalman滤波器进行目标位置的估计,预

在实际的监控系统中,面对的监控对象都会同时存在多个。目标的跟踪等价于在连续的图像帧之间创建基于位置、速度、形状、纹理、色彩等特征的对应匹配的问题,对于单个目标, 可以通过获得目标在每一帧中的位置得到运动轨迹, 即建立跟踪。但对于多个目标, 情况较为复杂, 在运动目标遮挡、暂时消失等情况下目标信息丢失使跟踪失败。
多目标跟踪系统结构图
跟踪分为两个步骤,首先对目标进行数据关联,形成目标的航迹,可采用MHT算法。然后根据每个目标历史的位置信息,利用Kalman滤波器进行目标位置的估计,预
 7184
7184











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















