






ISAR图像中目标选取算法的研究
院 (系): 电子与信息工程学院 专 业:信息对抗技术
学 号: 指导教师:
2015年7月
毕业设计(论文)
题 目 ISAR图像中目标
选取算法的研究
专 业 信息对抗技术
学 号
学 生
指 导 教 师
答 辩 日 期
逆合成孔径雷达可以对舰船,飞机等目标进行远距离成像,得到不同角度的目标图像。已在民用,军用等领域广泛使用。由于成像角度和成像距离的不同,雷达所得到的图像中往往含有大量的非目标数据,一方面,这会浪费了计算机处理设备的存储空间,另一方面,也降低了雷达系统的实时性。由此,本文提出了ISAR图像的目标提取技术,即在一幅含有噪声,杂波的ISAR图像中提取出感兴趣的目标图像,实现雷达系统有效性和可靠性的提升。
由ISAR成像的原理,可以将图像中的噪声分为分散式点状弱噪声,集中式点状强噪声和条纹噪声。针对这三种噪声,本文提出了空间滤波法,最小覆盖圆法和拟合相减法进行处理。
进一步,针对图像的各类特性进行分析,提出了最大值法,重心法,能量垂直投影分割法,基于C均值聚类算法和基于分水岭算法进行ISAR图像目标提取。并从运算速度和运算效果两方面对比分析各类算法的优缺点。
最后,针对不同特点的ISAR图像,提出了不同组合的处理方式,来实现运算时效性和可靠性的最优选择。
关键词:逆合成孔径雷达;目标选取;聚类算法;分水岭算法。
Abstract
Inverse SyntheticAperture Radar (ISAR) can acquire image of long-distance moving target such asships, aircraft et al, also could get the image of target from different angleof view. It has been widely used in civil and military field. Because of thedifference of imaging angle and distance, the ISAR images we got usually containlots of non-target data. On the one hand, it wastes the storage space ofcomputer processing equipment. On the other hand, it also reduces theefficiency of the radar system. So we propose the technology of the efficiencyof ISAR target extraction which can extract the target we want from thebackground of noise and clutter. We can improve the effectiveness andreliability of the radar system.
Considering thetheory of ISAR imaging, the noise can be divided into dot weak noise indispersion type, dot strong noise in aggregated type and stripe noise. In orderto tackle them, the strategy of the space filtering method, the minimum coveredcircle method and fitting-cancellation method are proposed.
Furthermore,after the analyzing of ISAR image, the methods based on maximum point, centerof gravity, vertical projection segmentation, C-means clustering and watershed areproposed to extract the target. Then assess them from the aspect of arithmeticspeed and arithmetic effect and find out the merits and demerits of everymethod.
At last, different methods are combined to tackle images withdifferent characteristics, which can maximize the effectiveness and reliabilityof the final arithmetic.
Keywords:InverseSynthetic Aperture Radar, target extraction,clusteringmethod,
watershedmethod.
目录
1.2 逆合成孔径雷达目标提取及其相关理论的发展概况...- 4 -
3.2 利用阈值滤波法处理弥散型点状弱噪声...- 16 -
3.3 利用最小覆盖圆法处理集中型点状强噪声...- 17 -
哈尔滨工业大学本科毕业设计(论文)原创性声明.- 44 -
随着合成孔径雷达(SAR)及逆合成孔径雷达(ISAR)系统的迅速发展,人们获得的ISAR图像数据越来越多,而对ISAR图像的处理和压缩能力仍旧相对滞后。ISAR图像选取是ISAR图像存储和传输的关键问题之一,引起各国研究者的广泛关注,成为近年来的研究热点之一。与其他种类图像(如光学或红外图像)相比,ISAR图像斑噪声明显,多尺度目标同时存在,存在条纹噪声,数据规模庞大等特点给目标选取工作带来了不小的困扰。因此,开展ISAR图像选取的研究对于促进ISAR技术的发展具有重要意义。
逆合成孔径雷达(ISAR)可以产生具有高分辨率的目标图像。然而,在ISAR所生成的图像中,真实目标只占据图像的较小部分,大部分区域为杂波或噪声,这样当图像尺寸较大时既不利于图像的保存,也不利于图像的实时传输。因此需要研究ISAR图像中目标选取的算法,高效实时的目标选取算法不仅有利于节省图像的存储空间及图像实时传输,并且有利于后续目标的分类识别工作。
1.2逆合成孔径雷达目标提取及其相关理论的发展概况
1.2.1逆合成孔径雷达成像的发展
人们应用的ISAR技术的早期主要是对合作目标进行成像。1961年,来自 Willow Run实验室的一行工作者对非合作目标开展了成像探究;随后美国通用电器公司及西屋公司等相继开始对空间轨道的目标进行成像研究。20世纪70年代,美国麻省理工大学的Lincoln实验室率先对近地空间上的轨道目标进行了高质量成像。1980年,来自美国的V. C. Chen对真实飞机进行了逆合成孔径雷达成像,并对成像结果进行预处理。美国海军与德仪合作,在1980年获取了第一幅舰船目标的ISAR像。除这些常见目标之外,1972 年人们获得了金星的逆合成孔径雷达图像。1996年美国V. C. Chen提出了联合时频分析法获得了运动目标的图像。随着人们深入地对ISAR技术进行探索,现有的ISAR系统已可以得到绝大部分的运动目标的图像,这使得ISAR技术成为现代战略防御系统的重要技术之一。
1.2.2 ISAR图像中各类噪声的分类
根据ISAR图像的噪声特征,可以将ISAR图像中的噪声分为三类,且各自分别具有不同的特性和形成原因。
(1)弥散型点状弱噪声 此类噪声主要由仪器自身以及目标的背景产生,信噪比较高,表现在图像上,其分布没有固定的规律,单个噪声点称点状分布,且分布范围广泛,故被称为弥散型;其信噪比较高故称为弱噪声。此类噪声往往可以用阈值法直接进行处理。
(2)集中型点状强噪声 此类噪声主要由强烈的杂波和强噪声点产生,表现在图像上,信噪比较低,其分布多呈聚集块状分布,在图像上往往仅分为几块,故称为集中型;由于其较低的信噪比,故称为强噪声。此类噪声往往无法使用阈值法直接进行处理,需要采用分割法或聚类等方法进行处理。
(3)条纹噪声 此类噪声主要是由于相位补偿引起的聚焦不良,螺旋桨调制效应以及强散射点副瓣的产生,在图像上表现为以一个点为中心的一条或一列呈现的明亮条纹,对于此类噪声,需要根据其形成原因及表现特性进行具体分析后再进行处理。
1.2.3 ISAR图像目标提取技术的历史及现状
本文所要涉及的ISAR图像目标选取技术,就是要在含噪声和杂波的单目标ISAR图像中框选目标图像存在的区域。通过选取技术,可以达到节省传输带宽,节约存储空间的目的。国内外尚未将目标选取技术作为一个专门的项目进行研究,而常用技术大致可分为灰度最大值法,重心法,投影分割法,C均值聚类算法及分水岭算法。
魏颖等人通过局部灰度最大值与建立在Mahalanobis距离分类算法的肺结核预诊算法结合后提出了一种孤立状态下自动检测肺结节的算法,该算法在对原始CT图像肺进行实质分割之后利用检索局部最大灰度值得方法对感兴趣区域进行预分割;通过选取分割后的感兴趣区域中的特征,通过支持向量机,对各个特征向量进行描述,最后通过改进的Mahalanobis距离分类算法对肺结节进行划分。通过实验,我们可以知道CT图像中的孤立性肺结节能够被该算法能够很好地选取出来,为医生对患者进行早期肺癌预警提供了极大的帮助。此算法中图像预处理和肺实质区域选取的思路同样适用于逆合成孔径雷达的图像选取工作。
黄战华在他的一种视频运动目标轨迹的实时探测方法一文中通过对连续图像的相减获得图像目标瞬时位置,将低于某个阈值的像素点进行归零化处理,减少了背景噪声和杂波的影响,再将图像划分为不同的区域,计算各个区域的重心点位置和归一化重量,我们可以用阈值法将背景区域中的噪声和杂波进行滤除,留下的就是重量较大的目标区域。通过对局部重心的整合分类我们可以将邻近的子块进行连通,得到一个固定的组块,通过对该组重心的计算我们可以估计出目标中心的位置。而后对图像进行分块处理,计算各个子块的重心位置坐标和他们的重量,通过重量对其进行分类,经过阈值处理,重量不为0的子块便会被分入相同的子空间,也就是说他们被分配了相同的群组属性,最后通过对群组的计算我们得到其合并后的重心位置以及合并后的重量作为每个目标的位置和重量。由于本文中只考虑单目标的重心定位工作,所以可以将上述重心定位算法简化,只考虑唯一的一个单连通区域中的情况。而对那些杂波产生的较小的区域,采取抛弃处理。
曹卫将二分思想引入到字符分割领域,在实现快速分割的基础上避免了传统算法中的粘连字符误分割问题。通过对字符能量向垂直方向进行投影,检测投影区域中的波谷点就可以得到字符的边界。在这里,我们将投影方向扩展到二维空间,通过对ISAR图像的水平投影和垂直投影,由于我们要处理的图像中仅含有单个目标,所以需要重新定义边界点的选择,不能盲目搬用曹卫所提出的波谷点。根据ISAR图像的成像特点以及能量投影曲线的特点,我们可以依据能量投影的峰值点的值来合理选择分割阈值,这样既提高了算法的通用性,也可以一定程度上解决了误分割问题。理想状态下的提取结果即不会丢失目标信息,也不会将大量的背景噪声杂波包含到提取结果中。
聚类算法在图像分割和特征提取等领域受到广泛应用,这里我们也可以将此算法引入到目标提取领域。针对不同的情况,K-means算法,K-medoids算法等被提出,这里我们可以采用模糊C均值算法来对整幅ISAR图像进行聚类分析。这是一种在模式识别领域常见的算法,通过求解目标函数的极值来划分数据实现目标的聚类分析。传统意义上的C均值算法将隶属度划分为非0即1,在实际应用中,目标往往不具有如此明确的隶属度,这就要求我们引入模糊的思想到聚类分析中,对处理对象进行软划分,虽然模糊处理会对边界点造成误划分,但从整幅图像的角度来看,模糊化的聚类分析可以提高算法的适用性,减少聚类分析误处理的概率。
在图像选取的过程中,可以套用此类聚类算法,但实际操作过程中并不需要将杂波形成的较小的图像也进行聚类分析,通过滤波后对最大类内相关度的控制,区分目标图像和杂波及背景图像,框选出目标区域。总体而言图像选取可以用更快的速度来实现聚类分析,提供更快的响应速度。
高静在将分水岭算法应用于医学图像处理,通过对细胞图像的分水岭处理,实现对各个细胞子单元的区分,这样就可以为医疗工作者提供更加清晰的细胞图像,便于对癌症或其他病症的确诊。经过分水岭变换之后,细胞的边界点变得更加明显,同时不同细胞之间的差异也被加重体现出来。那么在同样的思路的指导下可以将这个思路应用于ISAR图像的选取工作,通过分水岭变换得到感兴趣目标的边界信息,然后依据此边界信息就可以将目标进行提取。但是,医学图像中的细胞是特征明显,干扰小的图像,而处理ISAR图像中需要考虑噪声及杂波的影响,这就需要对以往的分水岭算法进行改进或者是进行去噪声的预处理,提出一种更切实可行的方案。
1.2.4 本文的主要研究内容
本课题的研究内容主要是针对ISAR成像的原理进行分析,得到各类噪声产生的原因以及处理方法,最后提出不同的目标提取方法,对比分析各类方法的优缺点。
本文内容主要分为四章:
第一章:主要介绍了本目标提取课题的背景资料以及相关理论的国内外发展现状,为本课题的研究方向和理论来源提供基础。
第二章:模拟ISAR成像仿真部分。这章主要介绍了ISAR成像的原理,并进行了建模成像。
第三章:ISAR图像的预处理。通过利用不同的噪声处理方法对ISAR图像进行预处理,便于后续算法的进行。
第四章:ISAR图像的目标提取。这章是本文的重点章节,通过不同的算法对ISAR图像进行目标提取,并对比分析各类算法的优缺点。最后,针对不同的ISAR图像处理要求,提出不同的算法组合方式来处理相应的图像。
第2章 ISAR成像的仿真
2.1 引言
逆合成孔径雷达不同于普通的雷达,它具有很好的分辨率,通过对距离向及方位向图像的获取便可以绘制二维的目标平面图像。这就使得ISAR对空间中的目标以及海上目标进行二维平面成像成为可能。逆合成孔径雷达成像过程中的目标运动可以分为平动和转动,平动就是目标沿着雷达波束的方向运动,这类运动可以补偿掉,对成像没有作用;而转动则是物体沿着雷达波束的垂直方向相对旋转,此类运动过程中目标上的每点相对于雷达会产生不同的运动形态,这也就对应了不同的多普勒频移量,ISAR成像主要依赖的就是多普勒频率偏移。因此,可以由不同的散射点的回波能量的叠加来绘制ISAR图像。
本章用于阐述ISAR成像的基本原理,2.2节叙述ISAR成像的基本理论,2.3节对ISAR成像进行MATLAB仿真,2.4节进行本章小结。
2.2 ISAR成像的基本理论
ISAR R-D算法的研究是对ISAR成像结果进行处理的基础性学习。也是对ISAR各种噪声产生原因进行分析和对噪声进行处理时必须清楚的基础知识。所以对ISAR R-D成像算法的理解是十分必要的。
通过目标相对于雷达的旋转,一幅ISAR图像可以产生很高的横向分辨率。脉冲压缩技术以及大带宽信号的引入也为距离分辨率的提高打下基础。因此,我们可以用逆合成孔径雷达系统获取高分辨率的二维图像。逆合成孔径雷达成像过程中,目标相对于雷达的运动可以被分解为水平运动和绕轴转动,其中绕轴转动是逆合成孔径雷达成像所必要的,而水平运动会干扰成像效果,需要设法去除。
为了更清楚地阐述逆合成孔径雷达成像的原理,假定雷达与目标之间不存在水平运动分量,仅仅只有绕轴转动分量。这样就可以用图1来展示逆合成孔径雷达的成像原理。图中向大家展示的就是在雷达照射的一个三维目标区域中,向二维图像平面投影后所得到的结果,目标以十分均匀的角速度 绕着z轴上的一点O作匀速旋转运动,雷达同目标之间的距离为固定值 ,那么在运动刚开始时目标上的一个定点( )上的回波反射回雷达的距离就是:
|
| (2-1) |
如图1展示了这种回波在XOY平面上的具体情况:
图1 ISAR成像原理
倘若目标本身的尺寸大小远远小于雷达与目标之间的相对距离(即: ),这时便可以得到一个更好的近似状态下的距离公式:
|
| (2-2) |
其中
|
| (2-3) |
此时,回波信号所产生的多普勒频偏 可以用下述公式表达:
|
| (2-4) |
在这个公式中,雷达信号的波长用 表示。若我们对 及其之后的一个较小的时间范围内雷达发射及返回的信号进行接收和处理,式(2-2)和式(2-4)可近似计算为
|
| (2-5) |
这样我们可以看出, 散射点的位置参数可以通过分析回波信号与发射信号之间的距离延时和多普勒频来进行估计。在应用过程中,等多普勒平面是一组平行于由转轴和雷达视线方向平面所决定的平行平面,如图1所示,而等距离平面是一组垂直于雷达视线方向的平行平面。通过发射大带宽信号可以获得距离向的高分辨:
|
| (2-6) |
由式(2-5)可以看出,如果要使横向分辨率 ,那么就要求逆合成孔径雷达的多普勒频率分辨率能达到:
|
| (2-7) |
而通过对实际能达到的率分辨率的了解,我们知道它是由相干积累时间T决定的:
|
| (2-8) |
那么,这是我们可以获得的横向分辨率就是:
|
| (2-9) |
在这个式子中,目标在观测时间内的总转角为 。这样,逆合成孔径雷达所发射的信号的带宽越宽,它所具有的距离向分辨率也就越大;目标在总测量时间内转过的角度越大(这可以看成等效的天线的孔径越大),它所获得的横向分辨率也就越高。特别的,式(2-9)是在目标转动角度很小的条件下推导得到的一个近似表达式,这种情况下我们可以利用距离-多普勒算法近似地去估计二维图像。当转动角度很大的情况下,目标相对于雷达的运动所转过的角度就会扫过多个距离基本单元,这时候逆合成孔径雷达的成像结果就会发生距离向和方位向上的焦距散射。这也就标明,距离多普勒成像算法只适用于小角度的目标成像,观测时目标散射点和雷达之间的转动偏移可以超过一个距离的多普勒分辨率单元。在这种情况下,我们所测量的目标的大小和成像获得的分辨率之间就会有如下的限制关系:
|
| (2-10) |
式中 为目标距离向和方位向的最大尺寸,雷达波长为 。
逆合成孔径雷达所测量的目标通过水平方向运动补偿以后便等价成转台目标。为了更好地说明转台成像原理,可以建立如图2中的坐标系,图中O是转台中心,需要成像的目标放在转台上,放置着待测目标的转台在雷达发射的波束内以角速度 匀速绕点O旋转。
图2 ISAR转台成像几何关系示意图
若各目标点上的散射系数用 来表示,目标在z方向上的尺寸远远小于雷达和转台中心点之间的距离 ,那么在z轴平行线上的点所反射的回波会进行同相位下的叠加,这是使
|
| (2-11) |
其中L 为在 点目标z的范围。那么目标向XOY面投影所得到的结果就是 ,它代表了 坐标位置处目标的散射强度,成像平面由X轴,Y轴确定,逆合成孔径雷达设法得到 的一个估计结果 来对目标进行二维成像,这时 被称为目标的ISAR像。
本文中设逆合成孔径雷达发射了一组线性调频脉冲串信号:
|
| (2-12) |
式子中, 是雷达发射的第n个脉冲信号, 代表了它的幅值
|
| (2-13) |
如果不考虑天线的发射增益接收增益,也不考虑电磁波在自由空间中传播所产生的衰减情况,那么目标上的点(x,y)由于雷达的照射而产生的散射信号返回到雷达处被雷达接收:
|
| (2-14) |
这里R是点 到雷达的距离,由图2可以算出
|
| (2-15) |
图2中, 是目标上距离雷达 的一个参考点,在实际成像过程中 是无法预先知道的。这时我们假设雷达所得到的目标雷达间距为 ,由于测距误差 ,这时可以将发射信号的回波时延 作为参考信号:
|
| (2-16) |
该信号同接收到的回波进行混频可以得到:
|
| (2-17) |
式中: ,由于 的值很小,可以略去。混频后的总输出为
|
| (2-18) |
令 为调制信号的瞬时频率,调制信号的瞬时波长为 ,将 带入上式则有
|
| (2-19) |
式中, 与 是不同的。 是连续变化的量,但是 仅仅在 中存在,这也就使得式子中的指数项 也仅仅在 这个区间内才有值。
令 ,
则
|
| (2-20) |
当上式 时,此时逆合成孔径雷达不存在距离向上的测量误差,雷达的接收信号 就是目标的散射像 的空间频谱 在 处的值,其中 是 的二维傅里叶变换。这里 是快速变化的,在脉冲宽度 时间内从最大值 变化到 ,也就对应着它的频率从 变化到 ;而在 的转角范围内,相对于 来说它的变化时很小的,在计算中我们可以不去考虑。这样,在一个脉冲回波内,相应的空间频率 就是在如图3所示的一个小范围上的值,即图中扇形区域上的辐射线上的值。
图3 成像结果中空间谱范围
但是在实际应用的过程中,由于我们要获得较高的分辨率,这就要求成像期间目标不能产生过大的转角。小角度情况下图3中的阴影部分可以姑且作为矩形来处理,此矩形中的散射波线条可以看成是平行于横坐标轴的一组水平线。这时通过直角坐标系下的二维快速傅里叶变换就可以实现对目标像的计算,这个步骤包含了对回波信号进行采样,量化,快速傅里叶变换。这时得到的只是目标的线性空间距离像,这时对于同一距离单元内的信号进行逆快速傅里叶变换就可以获得目标的横向方位向,通过这一步,我们就可以得到一个目标的二维逆合成孔径雷达成像结果。
2.3ISAR成像的MATLAB仿真
本次研究采用MATLAB仿真的方式模拟ISAR成像,通过一个简单的实验可以对上述成像算法进行验证。
通过对平面上小船图像的仿真成像分析,我们设置模拟发射信号的中心频率为10GHz,带宽B=400MHz,脉宽25.6us,距离向方位向采样点数为128个,取一组仿真模拟目标点:(-8,0)、(-6, )、(-4, )、(-2, )、(0, )、(2, )、(4, )、(6, )、(8, )、(8,0),这里只考虑成像情况,略去运动补偿和噪声处理可以得到以下的回波图像:
图4 二维ISAR像
图5经过二维压缩后的空间分布
由图可以看到,该算法对小船成像进行了较好的模拟,在仿真点处,产生了足够大的回波,通过对这些回波的分析,便可以在二维平面上绘制出如图5所示的二维ISAR像。虽然可以通过改变目标点的位置和点数,建立三维ISAR成像模型,更好地对ISAR成像进行模拟,但这并不是本课题主要研究内容,在此也就不再在三维建模上继续深入。
2.4本章小结
本章首先介绍了ISAR成像的基本原理,分析了距离多普勒算法在成像过程中的应用,最后通过建立舰船模型的散射点进行了成像仿真,验证了算法可行性。本章的主要工作就是在学习原理的基础上理解ISAR成像,以便于后续的分析工作和算法设计。对于噪声处理和目标提取来说,更重要的还是通过理解原理的基础上研究如何对其进行处理,这些将在后续章节中一一进行展开介绍。
3.1 引言
ISAR图像和普通的光学图像具有很大的区别,所以应该针对ISAR图像的特点采取相应的处理方法。由于目标具有非合作性,环境中的噪声及干扰等都将会影响ISAR图像的质量,所以对ISAR图像进行目标提取就要先进行去噪声预处理,来抑制杂波和噪声产生的影响,改善图像质量,从而更好地实现目标提取。
通过对不同种类的噪声特性进行分析,将ISAR图像中的噪声划分为弥散型点状弱噪声,集中型点状强噪声和条纹噪声。根据不同噪声的成因及特点,提出了采用阈值滤波法处理弥散型点状弱噪声,最小覆盖圆法处理集中型点状强噪声以及拟合相减法处理条纹噪声。
本章介绍针对不同噪声的处理方法并给出相应的处理结果,为去噪声预处理提供了解决方案,方便后续目标提取算法的进行。
3.2 利用阈值滤波法处理弥散型点状弱噪声
ISAR图像中最常见的噪声就是弥散型点状弱噪声,此类噪声产生原因多为仪器噪声或图像的一般背景噪声引起的,噪声强度低,信噪比较高。针对这类噪声,采用阈值滤波法即可进行处理。
所谓阈值滤波法,就是将阈值法与掩膜滤波法结合使用,通过阈值处理,可以将图像中较弱的噪声点去除,但这会使图像中留下一些较强的噪声散点,这时只要再进行一步掩膜滤波处理就可以低通滤波,使这些噪声散点与背景产生模糊融合,达到对此类噪声进行处理的目的。通过图中可见此类算法对弥散型点状弱噪声有很好的处理效果。但同时也应该意识到,低通滤波处理后的图像目标边界将会产生模糊,虽然消除了噪声散点的影响,但会给目标提取带来一定的麻烦。
以下就是针对实测舰船数据进行阈值滤波处理的处理结果:
图6 阈值滤波处理算法运行结果
3.3 利用最小覆盖圆法处理集中型点状强噪声
不同于弥散型点状弱噪声,集中型点状强噪声在空间上分布聚集且灰度值大,信噪比较低,单纯采用阈值滤波法无法进行有效处理,这时就需要提出一种行之有效的方法来对这些强噪声点进行滤除。
这里引入一种最小覆盖圆的思想,通过选取某些高灰度值点作为特征点,这里选取了灰度值大于240的6271个点作为特征点,在图中用红色小圆圈标注出来。选择位于四个角的点A、B、C、D。分别计算每个特征点到四个点的欧式距离和,取欧氏距离和最小的那个点作为图像中心点,在图6中用“蓝色+号”标注出来。再分别计算其他各点到该点的距离,得到各个特征点的距离分布如图7,可以发现大部分点与中心点的距离都在335个单位长度以内,而仅有几个点在此距离之外,且距离相差非常大。经过分析可以知道距离相差非常大的这些点均是集中型点状强噪声点。那么就可以以十字中心点为中心,335为半径进行最小覆盖圆圈定,所得到的结果就是需要的最小覆盖圆。
图7 最小覆盖圆法示意图
图8 各点到中心点的距离分布
通过分析可以发现在最小覆盖圆以外的点都是集中型点状强噪声点,将这些强噪声点进行舍弃,就可以去除此类噪声。经过对实测图像进行分析,该算法对距离较远的噪声处理效果明显,但对于距离目标较近噪声或者目标点上的孤立点会造成最小覆盖圆的误圈定,需要结合实际调整最小覆盖圆半径的大小来实现最佳的处理结果。
3.4 利用拟合相减法处理条纹噪声
对于给定的一组离散点,确定一个函数来逼近这组离散点的分布函数,可用的方法有插值法和曲线拟合法。但实际应用中,数据不可避免的存在误差,插值法会将这些误差也计算到插值的结果中。所以,应当选择既能够表现出数据点灰度值的变化趋势,又能够尽可能消除数据点中存在的误差影响的方法,也就是通过曲线拟合的方法来逼近原函数。在此,选用最小二乘法进行拟合。总的来讲,最小二乘法的基本思路就是要求拟合曲线上的点到离散点的距离的平方和最小。也就是对于N个离散点,求一条M阶的曲线(M<N,这里取M=3),使拟合点到这N个离散点的距离的平方和最小,就认为该曲线最好的反映了这N个点变化的总趋势。
曲线方程为: 。
将已知的N个离散点带入上式,记 ,则要使
|
| (3-1) |
即是使 最小,所以,最小二乘法曲线拟合问题便变成了求Q得最小极值点 的问题。为了求这个极小值点。可以令: i=0, 1, … m,从而可得正规方程组:
|
| (3-2) |
其中,x,y是已知量,a是未知量,解该方程组可得到各点距离平方和最小的曲线的所有参数,从而求得最小二乘法拟合后的曲线方程。
条纹噪声一般都发生在具有强散射点所在的单元或者是存在螺旋桨效应点的单元,如果采用简单的图像处理中直接用门限进行去除的方法,门限点的选择是很大的问题。如果门限点过大,的确可以抑制强散射点单元中的条纹干扰,但同时也会丢失目标在同幅图像中的弱散射点的,噪声目标信息丢失。这就要求找到一种既能够消除强散射点造成的条纹噪声的同时又保留弱散射点不丢失的条纹噪声处理的方法。
下图是实测条件下的一副含有条纹噪声的ISAR图像。
图9 含条纹噪声的ISAR图像
可以看到,由于在图像中心位置存在较强的散射点,导致该列出现一条条纹,在实际应用以及后续的图像选取中,条纹是不利于算法进行的,所以需要对条纹噪声进行去除。
在本算法中,某行(或列)中的像素点灰度非零点多于70%时,便认定该行(或列)存在条纹噪声,需要进行去噪声处理。
采用图中第497列像素为例,该列的灰度分布如下图中蓝色线条所示:
图10 第561列灰度分布
由图8蓝色线条可见,存在条纹噪声的列中,灰度存在一定的相关性,这也就为拟合相减算法提供了可能。由于与灰度曲线峰值点相比,其他点灰度值相对较小,所以这里采用灰度值峰值的1/5作为拟合分界点,将该曲线分为三部分,对两侧曲线进行拟合运算,得到图8中的两条红色三阶曲线。从图中可以发现,该曲线较好地反映了拟合区域图像灰度的变化。从而将原图像灰度值减去拟合曲线的灰度值,再进行取模,可以得到如下的拟合相减法灰度运算的结果:
图11 拟合相减法灰度运算结果
经过对整幅图像拟合相减后,得到了如下的结果:
图12 拟合相减后的图像
可以看到,经过拟合相减后,图像中仍存在较少的孤立点需要进行处理,这时,采用一步腐蚀运算,可以处理掉孤立的噪声点。但经过腐蚀后会使得图像边缘出现锯齿,所以需要再进行一步膨胀运算,以恢复图像的边界信息。
拟合相减法虽然对图像有较好的处理结果,但是对于存在条纹的每一行(或列),都需要进行一步最小二乘法灰度曲线拟合运算,这极大地增加了运算时间。在实时性要求更高的场合中,应当采用运算速度更快的其他预处理算法。
3.5 本章小结
本章讨论了ISAR图像中常见的三种噪声,针对不同的噪声提出了不同的去噪声方法,为后续图像中的目标提取操作提供了便利。但是在实际应用过程中还会有更多种形式的噪声或是各种噪声的组合出现,所以在实际应用时应当做到具体问题具体分析,针对ISAR图像所表现出来的不同特点,选择合适的去噪声方法。不仅要提升运算速度,同时也应当考虑运算结果。
第4章 ISAR图像的目标提取
4.1 引言
上文中讨论了ISAR成像的原理和ISAR图像的去噪声预处理,接下来将进入本文的重点,讨论ISAR图像中的各类目标提取算法。这里定义目标提取为在一组含噪声和杂波的图像中提取出感兴趣的目标区域,以节约计算机设备的存储空间以及更加实时地传输雷达图像信息。
本章在对目前相关学科研究成果整理的基础上,提出了一些改进和创新的计算方法,并通过对实测雷达数据进行处理来验证算法的可行性。在此将分别介绍各类算法的原理和仿真结果,同时对他们的效果进行横向对比,分析各自的优缺点及适用性。
4.2 最大值法
由于ISAR成像是源于目标的回波信号,那么这个信号中就一定存在一个或几个最大值点,而且这些最大值点在没有干扰的情况下必然出现在欲选取的目标上。由此,可以通过选择图像中最大值点的位置,来确定一幅ISAR图像中目标的位置,然后根据横向定标的结果,选择合适的选框,来对目标图像区域进行选取。如果仅选择孤立的像素点,运算速度快,但一幅图像中可能存在多个最大灰度点,这其中还有可能包括一些干扰点,这对于框选中心的定位是十分不利的。所以可以选择4邻域,8邻域等方法,为不同邻域点分配不同的权重,来进行最大灰度点定位。这里,综合考虑运算速度和选取结果,采用8邻域9个点等权重的方式定位最大值点。模板如下图所示:
图13 最大值点选取模板
通过MATLAB仿真,在如下图像中定位了最大灰度点(图中和红色“+”点):
图14 ISAR图像中的最大值点
如图,通过寻找到ISAR图像中的最大值点,可以定位欲选取目标的位置。这里假设横向定标的结果是该目标图像为2000*2000的像素点,通过这个定标结果和选框的中心定位结果,对目标进行选取后,可以得到如下的图像选取结果:
图15 最大值法图像选取结果
可以发现,最大值法虽然运算速度快,但由于灰度值最大点不一定会出现在图像中心附近,所以选取的图像中会存在较多的非目标图像,同时,即便是定标结果十分精确,但中心点的偏移还是造成了目标图像的部分缺失,这对于选取结果来说,是十分不利的。
4.3 重心法
与最大值法思路类似,但是这个算法下重新定义了图像选取框体中心点的位置选择方式,采用计算图像灰度重心的方法来进行中心点选择。为了方便算法的执行,可以分别求横、纵两个方向的重心,其两个坐标轴方向重心的计算公式如下:
|
| (4-1) |
通过对图像重心的计算,可以得到如下结果:
图16 ISAR图像的灰度重心
从图中可以看到,重心法非常好地定位了目标图像的中心点,仍采用2000*2000像素的选择框体,得到如下图像选取结果:
图17 重心法图像选取结果
可见,重心法图像目标选取算法在图像噪声及干扰较小的情况下可以很好地对目标进行选取,但图像中的较大噪声可能会造成重心点偏移,在信噪比较低的情况下应当对此类问题予以足够的重视。
下面给出最大值法和重心法的算法流程图:
图18 最大值法/重心法流程图
4.4 基于垂直投影分割的目标提取算法
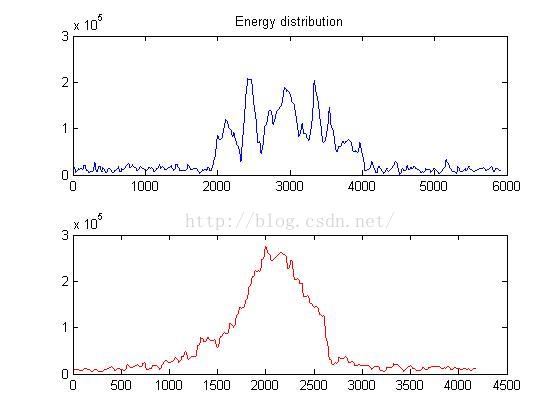
垂直投影目标选取算法的思路就是将目标图像的能量向垂直和水平两个方向进行投影,根据一定的阈值准则,将横向,纵向上留下的边界点作为目标区域,最后进行目标选取。下面给出通过将图片的能量投影到横纵两向后的结果,其中蓝色线条为纵向能量分布,红色线条为横向能量分布:
图19 ISAR图像能量分布(纵,横两向)
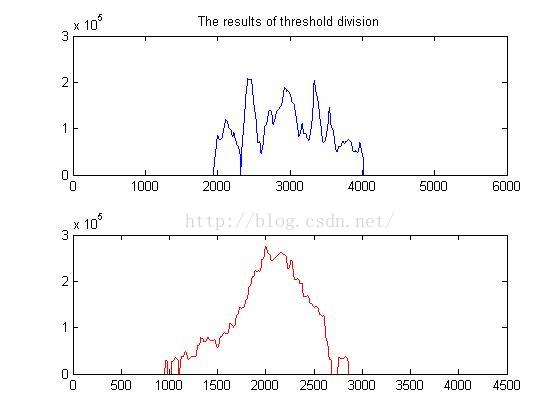
通过设定阈值为能量峰值的10%,可以对纵、横两个方向的能量投影进行分割,阈值分割后的能量分布如下图所示:
图20 阈值分割后的图像能量分布
由此可以得到选取的边缘点,通过此边缘点,就得到了如下的目标选取结果:
图21 垂直投影法图像选取结果
通过观察,可以发现垂直投影法虽然运算效率不如以上两种方式高,但其运算结果非常令人满意。同时,垂直投影法不需要预先进行横向定标,可以在没有任何先验条件的基础上进行图像的目标选取,这也是该算法的优势所在。但此类算法仍然无法满足高精度的要求,所以需要继续提出更加精确的算法。
其算法流程图如下:
图22 垂直投影ISAR图像选取算法
4.5 基于C均值聚类的目标提取算法
可以在对图像处理的过程中应用模糊C均值聚类的思想将ISAR图像划分成各个子图像,其中包含噪声点,杂波点以及目标点。由于图像本身具有复杂性和不确定性,便需要从模糊聚类的角度出发,采用FCM算法,对图像上的点进行聚类。将图像上的每一个像素都看成数据集中的一个样本,利用双特征值(目标、非目标)分析,将该问题变为一个优化问题:
|
| (4-2) |
且满足约束条件:
|
| (4-3) |
其中m>1,c是聚类的类数,在此算法聚类数为2,n是空间中样本数, 是样本k的第i类隶属度, 表示样本点 对于聚类中心的欧式距离,s是样本空间维度,这里采用的是二维空间的ISAR平面图像。
该算法的步骤大致为:
步骤一:设置模糊指数,目标函数精度,最大迭代次数;
步骤二:初始化聚类中心 ;
步骤三:根据聚类准则计算划分矩阵和聚类中心;
步骤四: 当达到了精度要求或者是最大迭代次数,则算法终止,否则转入步骤三;
步骤五:得到最后的分类结果。
下面给出算法的流程图:
图23 FCM算法流程图
经过该算法,可以得到如下的梯度幅值图像(反色处理后)和分类结果:
图24梯度幅值图像
图 25 FCM算法聚类结果
由图可见,经过模糊C均值聚类算法,图像中的所有未知目标点和噪声以及杂波都被分类了出来,而算法最后的目的是提取出想要的目标图像,这时候就需要对其进行判断。这里采用图像中最大单连通区域的方法。因为在噪声和杂波不强的情况下图像中最大的单连通区域一定就是需要的目标区域,经过最大单连通区域选择算法后得到如下结果:
图26 FCM聚类后结果中的最大单连通区域
此时便可以依据该单连通区域的边界条件来进行目标图像的提取。提取结果如下图所示:
图27模糊C均值聚类算法运行结果
该算法的提取效果与水平投影法相当,但可以很好地消除多种噪声的影响,对去噪声预处理要求较低,同样运算时间也略有增加。当目标成像效果较差时,可能会造成最大单连通区域只是目标的一部分这种情况,这时的提取结果便会丢失目标信息。
4.6 基于分水岭分割的目标提取算法
分水岭算法是一种基于拓扑学的图像处理算法。在这里我们采用标记分水岭算法,从灰度图像中的极小值点开始,设当前选取的极小值点的灰度值为 ,其中每个小于或者等于d的集水盆地都会被唯一标记,对于当前选取的灰度值是 的像素点,如果其邻域已经有被标记了的像素,就可以给它分配一个相同的标记;如果其周围没有被分配的像素,就可以将其看成一个新的集水盆,给它一个新的标记。不断对上述过程进行重复操作,直至所有的标记像素都被分配到了一个集水盆中,标记分水岭的算法就完成了。这时,也就区分了目标区域和非目标区域,为目标选取提供了可能。而欧式距离映射法是首先通过对二维图像进行腐蚀,计算各像素点的欧氏距离映射从而生成EDM图像,然后利用该图像作为初始拓扑表面,接着对其像素作为分配结果进行判断。EDM从图像最亮的值开始,直至迭代递减到1,然后重复此过程直至除了边界以外的所有像素点都被填充。
图像的梯度公式:
|
| (4-4) |
是图像的像素值, 是像素点的坐标。
分水岭算法流程图如下:
图28 分水岭算法流程图
运用MATLAB执行算法,对实测舰船图像进行处理,可以得到如下的结果:
读入舰船图像并转换为灰度图像:
图29 原图的灰度处理
使用SOBEL边缘算子对图像进行水平和垂直方向的滤波,然后求取模值,SOBEL算子处理后的边界处的图像会显示较大的值,在非边界处的值会很小。
图30 梯度幅值图像
如果直接用梯度的幅值图像进行分水岭运算,最后得到的结果常常会存在过度分割现象。所以需要分别对前景对象和背景对象进行标记,来获得更好的效果。
这里使用imopen,imclose对图像进行开,闭操作:
图31 ISAR图像的开闭操作
之后,进行图像的区域生长,可以得到类内相关度最大的区域,并进行阈值分割,得到:
图32 最大类内相关的区域点集合
基于上述区域点,进行图像选取:
图33 分水岭算法图像选取结果
由图可见,基于分水岭算法的图像选取可以得到最优的选取结果,而且不需要预先进行横向定标。但是分水岭算法十分复杂,运算时间较长,如果应用到实时性较强的场合,需要进行优化处理,以提升运算速度。
4.7 本章小结
本章分别介绍了最大值法,重心法,垂直投影分割法,C均值聚类算法和分水岭算法下的图像提取技术,通过对实测数据的处理验证了各类算法的可行性以及分析了他们的运算效果。通过对50幅包含舰船,飞机,导弹等目标的ISAR图像进行处理,可以得到各个算法的平均处理时间,将这个时间作为衡量运算速度的指标;对于衡量运算精度来说,由于无法直接得到一个标准的目标提取结果,所以采用分水岭算法运算之后的结果作为衡量运算精度的基准,其他算法的处理结果中如果丢失了目标的信息,以负百分比表示,代表得到的结果中缺失目标信息的比例;而如果其他算法的运算结果中除了需要的目标区域之外,还包含很多非目标噪声,就以正百分比表示运算结果的冗余量。预先定标就是指是否需要预先通过横向定标得到目标在ISAR图像上的范围,通过定标来得到选框大小。接下来将以表1的形式展示出来。
表1 各类ISAR图像目标提取算法的运算效果
| 算法 | 衡量指标 | ||
| 运算速度(s) | 运算精度 | 是否需要预先定标? | |
| 最大值法 | 1.015 | -56.2% | 是 |
| 重心法 | 1.385 | +11.6% | 是 |
| 垂直投影分割法 | 1.468 | +6.4% | 否 |
| C均值聚类法 | 6.971 | -2.1% | 否 |
| 分水岭算法 | 25.105 | 0 | 否 |
结 论
本文的研究对象是基于ISAR图像的目标提取技术,通过对目前已有的不同算法的学习和了解的基础上自己又提出了改进的算法,从ISAR图像的特点入手,研究如何对ISAR图像进行去噪声处理以及目标提取,通过对实测数据的处理,分析各个算法的性能和适用性。下面依次对各章的主要内容进行阐述:
首先,是基于ISAR R-D成像算法的雷达成像仿真,通过距离多普勒算法研究了逆合成孔径雷达成像的原理,了解了成像的特点,清楚了ISAR目标提取技术的意义所在:节约计算机存储空间,提升系统的实时性。为后续ISAR图像处理研究工作提出了一个新的方向。
其次,对ISAR图像进行了去噪声预处理。根据逆合成孔径雷达成像特点,分析了三种常见噪声:分散式点状弱噪声,集中式点状强噪声和条纹噪声。利用阈值滤波法处理分散式点状弱噪声,利用最小覆盖圆法处理集中式点状强噪声和利用拟合相减法处理条纹噪声。为后续的ISAR图像目标提取算法的进行提供了铺垫。
最后,利用不同的ISAR图像目标提取算法对实测数据进行了处理,分析了各个算法的优劣,由此,可以初步得出结论:最大值法适用性较差,虽然运算速度较快,但处理效果十分不理想,且需要预先进行横向定标,对应用环境要求苛刻;重心法运算速度与最大值法相当,但性能有极大地提升,在无噪声或弱噪声的情况下处理效果理想,同样,需要进行预先的定标也限制了它的应用普遍度;垂直投影分割法虽然运算速度较前两种方法略显缓慢,但处理效果明显,且不需要预先进行横向定标,在弱噪声及无噪声情况下易被广泛应用,当图像中存在强点噪声或条纹噪声时,会造成分割区间过大或过小的情况,所以在应用垂直投影分割法前应当进行去噪声处理;C均值聚类算法处理效果好,且不需要预先进行去噪声处理,但是在信噪比较低的情况下可能会产生最大连通域的误选取,在实际应用的过程中我们需要加以重视;分水岭算法处理效果最好,且对环境要求不严格,在存在较强噪声时依然具有很好的处理结果,应用范围广泛,但其算法步骤冗杂,实时性较差,需要在后续的研究中进行改进和优化。
本文只是对ISAR图像的目标选取在提出课题的基础上进行了初步的研究,结合其他领域的思路并进行算法上的创新,但限于时间和编者能力,还有很多不完善的地方亟待提升。关于图像处理算法的思路层出不穷,后续工作者也一定会在此方向上提出更好的方案。
[1] 冈萨雷斯 数字图像处理(MATLAB版)[M]电子工业出版社,2004
[2] 高静. 基于形态学分水岭算法的细胞图像分割[D].吉林大学,2008.
[3] A. Toumi, B. Hoeltzener, and A. Khenchaf.Using Watersheds segmentation on ISAR image for automatic target recognition.In International Marine Science and Technology Week, volume 2, pages 16–19, France, 2006.
[4]魏颖,郭薇,孙月芳,季策. 基于局部灰度最大和改进Mahalanobis距离分类的肺结节检测算法[J]. 中国图象图形学报,2008,09:1720-1726.
[5] 陈善丽 逆合成孔径雷达图像识别研究[D].浙江大学,2008.
[6]何强,蔡洪,韩壮志,尚朝轩 基于非线性流形学习的ISAR目标识别研究[A].电子学报 Mar.2010,vol.3.
[7] Xueying Yan,Licheng Jiao,Shuwen Xu Institute of IntelligentInformation Processing, Xidian University, Xi'an, China National Laboratory of Radar Signal Processing, Xidian University, Xi'an, China. SAR ImageSegmentation Based on Gabor Filters of Adaptive window In Over completeBrushlet Domain [A]. China Institute of Electronics(CIE).Proceedings of 20092nd Asian-Pacific Conference on Synthetic Aperture Radar(APSAR2009)[C].China Institute of Electronics (CIE):,2009:4.
[8]卢艳,潘英俊,陶荣辉,蔡英武 基于轮廓降噪的ISAR 仪器仪表学报 Oct. 2012.
[9]黄战华,张昊,蔡怀宇,张以谟. 一种视频运动目标轨迹的实时探测方法[J]. 光电子·激光,2002,03:277-281.
[10]Li Chunmao 1,Wang Lingzhi2,Wu Shunjun 31,3.NationalLab.of Radar Signal Processing, Xidian University,2.Xi'an Institute of Post and Telecommunications,Xi'an,Shannxi,710071,P.R.China.Ant Colony Fuzzy Clustering Algorithm Applied to SAR Image Segmentation [A].Chinese Institute of Electronics (CIE).Proceedings of 2006 CIE InternationalConference on Radar[C].Chinese Institute of Electronics(CIE):,2006:4.3
[11]赵健,周明全,谢端等.SAR图像小波域消噪方法[J].西北大学学报,2005,35(l)
[12] 张俊,张志勇,陈学广等.SAR图像斑点噪声抑制与滤除技术[1].遥感技术与应用,1998,13(3):44~47.
[13] Fast algorithm based on tripletMarkov fields for unsupervised multi-class segmentation of SAR images [J].Science China (Information Sciences),2011,07:1524-1533.
[14] Caner Özdemir, Inverse Synthetic Aperture RadarImaging With MATLAB Algorithms. Wiley Online Library. Mar.2012
[15] Voci, F. ; Mascioli, F.M.F. Radar, 2006 IEEE Conference on DOI: 10.1109/RADAR.2006.1631901Publication Year: 2006.
[16] 洪顺英,申旭辉,陈正位等.基于小波变换的SAR图像噪声滤除方法 [J].大地测量与地球动力学,2005,25(2).
[17] 池明星.小波阈值算法在SAR图像去除噪声处理中的应用研究[D].福建:厦门大学,2002.
[18]C.Lemareehal,R. Fjortoft. SAR imagessegmentation by morphological methods. 1998, SPIE Vol3497:111~121.
[19]Mallat S G. Zhou S. Singularitydetection and Processing with Wavelet [J]. IEEE Trans on Information Theory,1992,38 (2):617-643.
[20] 曹卫. 基于二分法的字符垂直投影分割算法[J]. 软件导刊,2010,10:71-72.
[21] 徐曼.基于改进快速分水岭算法的图像分割技术研究[D].华中科技大学,2010.DOI:10.7666/d.d139367.
本人郑重声明:在哈尔滨工业大学攻读学士学位期间,所提交的毕业设计(论文)《ISAR图像中目标选取算法的研究》,是本人在导师指导下独立进行研究工作所取得的成果。对本文的研究工作做出重要贡献的个人和集体,均已在文中以明确方式注明,其它未注明部分不包含他人已发表或撰写过的研究成果,不存在购买、由他人代写、剽窃和伪造数据等作假行为。
本人愿为此声明承担法律责任。
作者签名: 日期: 年 月 日
衷心感谢导师高建军老师对本人的精心指导。他的言传身教将使我终生受益。
感谢高建军老师,以及实验室全体老师和同窗们的热情帮助和支持!














 4179
4179











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









