







温湿度传感器在工业当中运用的比较广泛,通常用于检测设备所处环境的温度和湿度,温度过高,设备就有可能自动关机来保证设备不被烧坏。
我所采用的温湿度传感器是si7020-a20的芯片,I2C接口,地址如图描述:
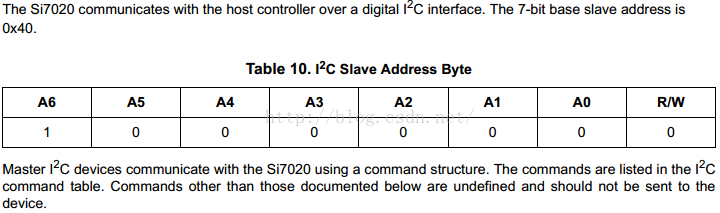
也就是说,作为从机,si7020地址是0x40。另外,cpu采用atml 9x35,内核2.6.39。知道0x40这个地址之后,就要在板级文件board-sam9x5ek中添加相应的代码。</span>
找到ek_i2c_devices数组,在数组中添加如下代码:
{
I2C_BOARD_INFO("si7020", 0x40)
},新建makefile:
obj-m := si7020.o
KDIR := ../linux-2.6.39
all:
make -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-linux- ARCH=arm
clean:
rm -f *.ko *.o *.mod.o *.mod.c *.symvers *.order#include <linux/module.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/init.h>
#include <linux/cdev.h>
#include <asm/uaccess.h>
#include <linux/slab.h>
#include <linux/spi/spi.h>
#include <linux/miscdevice.h>
#include <linux/device.h>
#include <linux/io.h>
#include <asm/uaccess.h>
#include <linux/sched.h>
#include <linux/i2c.h>
#include <linux/delay.h>
struct si7020_data{
struct i2c_client *client;
struct mutex lock;
int buf[2];
};
enum
{
humidity,
temperature,
};
struct si7020_data *si7020;
static void get_humi_val()
{
unsigned int ret = 0;
char tmp[2] = {0};
//printk(KERN_INFO "enter get_humi_val\n");
i2c_smbus_write_byte(si7020->client, 0xf5);
msleep(100);
i2c_master_recv(si7020->client, tmp, 2);
ret =((tmp[0]<<8)|tmp[1]);
if(ret < 0)
dev_err(&si7020->client->dev, "Read Error\n");
//printk(KERN_INFO "humi ret %d\n",ret);
si7020->buf[humidity] = 125*ret/65536 - 6;
if(si7020->buf[humidity] < 1)
si7020->buf[humidity] = 0;
if(si7020->buf[humidity] > 99)
si7020->buf[humidity] = 100;
//printk("si7020->buf[humidity] : %d\n", si7020->buf[humidity]);
//printk(KERN_INFO "exit get_humi_val\n");
}
static void get_temperature()
{
unsigned int ret = 0;
char tmp[2] = {0};
//printk(KERN_INFO "enter get_temperature\n");
i2c_smbus_write_byte(si7020->client, 0xf3);
msleep(100);
i2c_master_recv(si7020->client, tmp, 2);
ret =((tmp[0]<<8)|tmp[1]);
if(ret < 0)
dev_err(&si7020->client->dev, "Read Error\n");
//printk(KERN_INFO "temperature ret %d\n",ret);
si7020->buf[temperature] = ret;
//printk("si7020->buf[temperature] : %d\n", si7020->buf[temperature]);
//printk(KERN_INFO "exit get_temperature\n");
}
static int si7020_open(struct inode *inode, struct file *filp)
{
filp->private_data = si7020;
nonseekable_open(inode, filp);//设置为不可随机读取。
return 0;
}
static ssize_t si7020_write(struct file *filp, const char __user *buf,size_t size, loff_t *ppos)
{
return 0;
}
static ssize_t si7020_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos)
{
int missing;
struct si7020_data *dev = filp->private_data;
//printk(KERN_INFO "enter si7020_read\n");
mutex_lock(&dev->lock);
get_humi_val();
msleep(100);
get_temperature();
missing = copy_to_user(buf, &dev->buf, 8);
mutex_unlock(&dev->lock);
return 8;
}
static long si7020_ioctl(struct file *filp, unsigned int cmd, unsigned long args)
{
return 0;
}
static int si7020_release(struct inode *inode, struct file *filp)
{
return 0;
}
struct file_operations si7020_fops = {
.owner = THIS_MODULE,
.open = si7020_open,
.write = si7020_write,
.read = si7020_read,
.unlocked_ioctl = si7020_ioctl,
.release = si7020_release,
};
struct miscdevice si7020_misc = {
.minor = MISC_DYNAMIC_MINOR,
.name= "si7020",
.fops = &si7020_fops,
};
static int __devinit si7020_probe(struct i2c_client*client, const struct i2c_device_id *id)
{
int ret;
si7020 = kzalloc(sizeof(*si7020), GFP_KERNEL);
if (!si7020) {
return -ENOMEM;
}
si7020->client = client;
mutex_init(&si7020->lock);
i2c_set_clientdata(client, si7020);
ret = misc_register(&si7020_misc);
if (ret != 0) {
printk(KERN_INFO "cannot register miscdev err = %d\n", ret);
}
return 0;
}
static int __devexit si7020_remove(struct i2c_client *client)
{
struct si7020_data *si7020;
si7020 = i2c_get_clientdata(client);
kfree(si7020);
misc_deregister(&si7020_misc);
return 0;
}
/*-------------------------------------------------------------------------*/
static const struct i2c_device_id si7020_id[]= {
{"si7020",0},
};
static struct i2c_driver si7020_driver = {
.driver = {
.name = "si7020",
.owner = THIS_MODULE,
},
.probe = si7020_probe,
.remove = __devexit_p(si7020_remove),
.id_table = si7020_id,
}
;
static int __init si7020_init(void)
{
printk(KERN_INFO "enter si7020_init\n");
return i2c_add_driver(&si7020_driver);
}
module_init(si7020_init);
static void __exit si7020_exit(void)
{
printk(KERN_INFO "exit si7020\n");
i2c_del_driver(&si7020_driver);
}
module_exit(si7020_exit);
MODULE_DESCRIPTION("Driver for SPI SC16IS752");
MODULE_AUTHOR("tianyu");
MODULE_LICENSE("GPL");
MODULE_ALIAS("sct");
下面分段介绍代码。
struct si7020_data{
struct i2c_client *client;
struct mutex lock;
int buf[2];
};static int __devinit si7020_probe(struct i2c_client*client, const struct i2c_device_id *id)
{
int ret;
si7020 = kzalloc(sizeof(*si7020), GFP_KERNEL);
if (!si7020) {
return -ENOMEM;
}
si7020->client = client;
mutex_init(&si7020->lock);
i2c_set_clientdata(client, si7020);
ret = misc_register(&si7020_misc);
if (ret != 0) {
printk(KERN_INFO "cannot register miscdev err = %d\n", ret);
}
return 0;
}接下来主要讲讲open、read、函数。因为这个设备比较简单,不需要向此设备写入数据,也不需要设置模式,并且该设备的寄存器一般用不上。为了简单起见,不需要写太多的冗余代码。
static int si7020_open(struct inode *inode, struct file *filp)
{
filp->private_data = si7020;
nonseekable_open(inode, filp);//设置为不可随机读取。
return 0;
}static ssize_t si7020_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos)
{
int missing;
struct si7020_data *dev = filp->private_data;
//printk(KERN_INFO "enter si7020_read\n");
mutex_lock(&dev->lock);
get_humi_val();
msleep(100);
get_temperature();
missing = copy_to_user(buf, &dev->buf, 8);
mutex_unlock(&dev->lock);
return 8;
}get_humi_val函数和get_temperature函数比较类似,分析一种就可以了,以分析get_humi_val为例:
static void get_humi_val()
{
unsigned int ret = 0;
char tmp[2] = {0};
//printk(KERN_INFO "enter get_humi_val\n");
i2c_smbus_write_byte(si7020->client, 0xf5);
msleep(100);
i2c_master_recv(si7020->client, tmp, 2);
ret =((tmp[0]<<8)|tmp[1]);
if(ret < 0)
dev_err(&si7020->client->dev, "Read Error\n");
//printk(KERN_INFO "humi ret %d\n",ret);
si7020->buf[humidity] = 125*ret/65536 - 6;
if(si7020->buf[humidity] < 1)
si7020->buf[humidity] = 0;
if(si7020->buf[humidity] > 99)
si7020->buf[humidity] = 100;
//printk("si7020->buf[humidity] : %d\n", si7020->buf[humidity]);
//printk(KERN_INFO "exit get_humi_val\n");
}
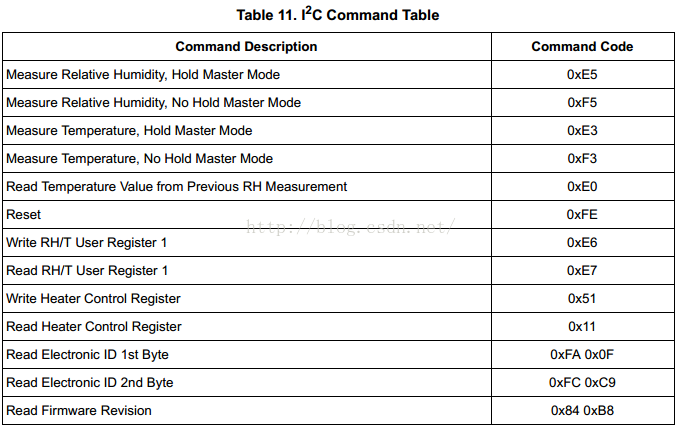
si7020指令说明
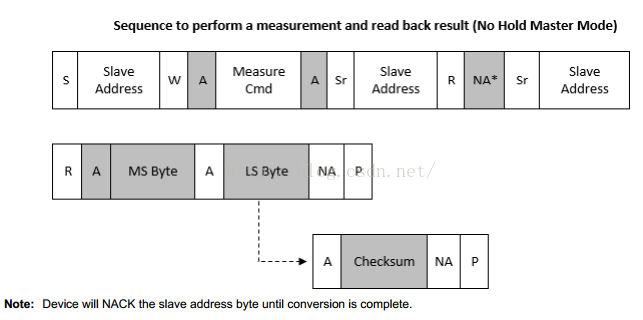
读写协议
细心的人可能会发现,为啥接收使用i2c_master_recv来接收,而不使用i2c_smbus_read_xxx类型的函数来接收。下面表格是i2c_smbus系列读写函数说明。
| 函数 | 作用 |
| i2c_smbus_read_byte() | |
| i2c_smbus_write_byte() | |
| i2c_smbus_write_quick() | |
| i2c_smbus_read_byte_data() | |
| i2c_smbus_write_byte_data() | |
| i2c_smbus_read_word_data() | |
| i2c_smbus_write_word_data() | 向设备指定偏移处写入二个字节 |
| i2c_smbus_read_block_data() | 从设备指定偏移处读取一块数据 . |
| i2c_smbus_write_block_data() | 向设备指定偏移处写入一块数据 . (<= 32 字节 ) |
在写入0xf5之前,要让模块等一会儿,也就是执行msleep(100),若立即读取数据则会返回-6,说明设备正忙,得不到数据。
温湿度传感器传入的数据先是发送高字节,然后发送低字节,所以,定义了一个 char tmp[2]数组,tmp[0]存放的是数据高字节,tmp[1]存放的是数据低字节,所以,在进行取数据的时候,要用ret =((tmp[0]<<8)|tmp[1]);代码进行转换。
下图是温湿度计算公式。

在内核中应该尽量避免使用浮点运算,所以传上去的温度值还需要在用户空间处理才能得到正确值,儿湿度没有浮点运算,因此在内核空间就计算好了,便传到用户空间。
下面是测试代码:
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
enum
{
humidity,
temperature,
};
int main()
{
/*
内核空间传到应用空间是大小为 2 的int型数组。
buf用来存放内核空间传上来的值。
buf[0]存放湿度,湿度已经计算好了。
buf[1]存放温度。温度没有计算好,因为内核尽量避免使用浮点运算。
温度计算公式为:175.72*buf[temperature]/65536-46.85;
*/
int buf[2] = {0};
int fd;
int humi;
float temper;
fd = open("/dev/si7020", O_RDWR);
while(1)
{
read(fd, buf, sizeof(buf));
humi = buf[humidity];
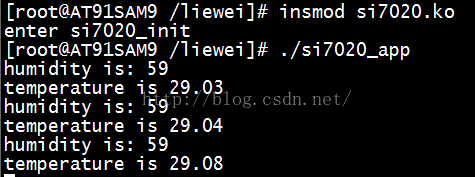
printf("humidity is: %d\n",buf[humidity]);
temper = 175.72*buf[temperature]/65536-46.85;
printf("temperature is %.2f\n",temper);
sleep(2);
}
close(fd);
return 0;
}
在未编写驱动之前,可以先使用i2c-tools来测试i2c硬件是否已经通了。首先检查系统有几组i2c总线。
命令:i2cdetect -l
这说明只有一组i2c。
然后查看i2c-0总线挂载的i2c设备。
命令:i2cdetect -y 0
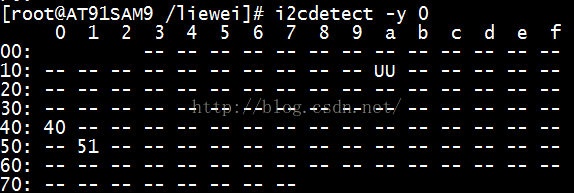
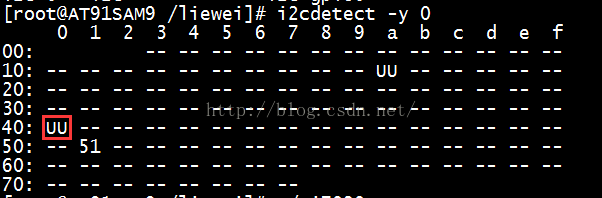
可以知道,i2c-0总线上有0x1a,0x40,和0x51这三个设备,其中UU表示已经有驱动程序为这个设备服务。0x40正是我们的温湿度传感器,现在是没有驱动为温湿度传感器服务的,待会加载了驱动之后,就会变为UU。
寄存器写入格式:如果向I2C设备中写入某字节,可输入指令i2cset -y 1 0x50 0x00 0x13
命令:i2cset -y 0 0x40 0xF5
然后再获取数据:i2cget -y 0 0x40

这个数据是只读取了一个字节哦,数据的低字节被丢弃了。但是这也说明了我们的硬件是没有问题的。
当insmod si7020.ko之后,0x40那儿就变成了UU。















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









