










先抛图修改过的:
从前面几篇文章,可以知道camerahal是在initialize的时候open操作被声明初始化的,现在先分析一下CameraHal初始化的内容:
CameraHal::CameraHal(int cameraId)
:commandThreadCommandQ("commandCmdQ")
{
LOG_FUNCTION_NAME
{
char trace_level[PROPERTY_VALUE_MAX];
int level;
property_get(CAMERAHAL_TRACE_LEVEL_PROPERTY_KEY, trace_level, "0");
sscanf(trace_level,"%d",&level);
setTracerLevel(level);
}
mCamId = cameraId;
mCamFd = -1;
mCommandRunning = -1;
mCameraStatus = 0;
mDisplayAdapter = new DisplayAdapter();
mEventNotifier = new AppMsgNotifier();
#if (CONFIG_CAMERA_MEM == CAMERA_MEM_ION)
mCamMemManager = new IonMemManager();
LOG1("%s(%d): Camera Hal memory is alloced from ION device",__FUNCTION__,__LINE__);
#elif(CONFIG_CAMERA_MEM == CAMERA_MEM_IONDMA)
if((strcmp(gCamInfos[cameraId].driver,"uvcvideo") == 0) //uvc camera
|| (gCamInfos[cameraId].pcam_total_info->mHardInfo.mSensorInfo.mPhy.type == CamSys_Phy_end)// soc cif
) {
gCamInfos[cameraId].pcam_total_info->mIsIommuEnabled = (IOMMU_ENABLED == 1)? true:false;
}
mCamMemManager = new IonDmaMemManager(gCamInfos[cameraId].pcam_total_info->mIsIommuEnabled);
LOG1("%s(%d): Camera Hal memory is alloced from ION device",__FUNCTION__,__LINE__);
#elif(CONFIG_CAMERA_MEM == CAMERA_MEM_PMEM)
if(access(CAMERA_PMEM_NAME, O_RDWR) < 0) {
LOGE("%s(%d): %s isn't registered, CameraHal_Mem current configuration isn't support ION memory!!!",
__FUNCTION__,__LINE__,CAMERA_PMEM_NAME);
} else {
mCamMemManager = new PmemManager((char*)CAMERA_PMEM_NAME);
LOG1("%s(%d): Camera Hal memory is alloced from %s device",__FUNCTION__,__LINE__,CAMERA_PMEM_NAME);
}
#endif
usleep(1000);
mPreviewBuf = new PreviewBufferProvider(mCamMemManager);
mVideoBuf = new BufferProvider(mCamMemManager);
mRawBuf = new BufferProvider(mCamMemManager);
mJpegBuf = new BufferProvider(mCamMemManager);
usleep(1000);
char value[PROPERTY_VALUE_MAX];
property_get(/*CAMERAHAL_TYPE_PROPERTY_KEY*/"sys.cam_hal.type", value, "none");
if (!strcmp(value, "fakecamera")) {
LOGD("it is a fake camera!");
mCameraAdapter = new CameraFakeAdapter(cameraId);
} else {
if((strcmp(gCamInfos[cameraId].driver,"uvcvideo") == 0)) {
LOGD("it is a uvc camera!");
mCameraAdapter = new CameraUSBAdapter(cameraId);
}
else if(gCamInfos[cameraId].pcam_total_info->mHardInfo.mSensorInfo.mPhy.type == CamSys_Phy_Cif){
LOGD("it is a isp soc camera");
if(gCamInfos[cameraId].pcam_total_info->mHardInfo.mSensorInfo.mPhy.info.cif.fmt == CamSys_Fmt_Raw_10b)
mCameraAdapter = new CameraIspSOCAdapter(cameraId);
else
mCameraAdapter = new CameraIspAdapter(cameraId);
}
else if(gCamInfos[cameraId].pcam_total_info->mHardInfo.mSensorInfo.mPhy.type == CamSys_Phy_Mipi){
LOGD("it is a isp camera");
mCameraAdapter = new CameraIspAdapter(cameraId);
}
else{
LOGD("it is a soc camera!");
mCameraAdapter = new CameraSOCAdapter(cameraId);
}
}
//initialize
{
char *call_process = getCallingProcess();
if(strstr(call_process,"com.android.cts.verifier")) {
mCameraAdapter->setImageAllFov(true);
} else {
mCameraAdapter->setImageAllFov(false);
}
}
mCameraAdapter->initialize();
updateParameters(mParameters);
mCameraAdapter->setPreviewBufProvider(mPreviewBuf);
mCameraAdapter->setDisplayAdapterRef(*mDisplayAdapter);
mCameraAdapter->setEventNotifierRef(*mEventNotifier);
mDisplayAdapter->setFrameProvider(mCameraAdapter);
mEventNotifier->setPictureRawBufProvider(mRawBuf);
mEventNotifier->setPictureJpegBufProvider(mJpegBuf);
mEventNotifier->setVideoBufProvider(mVideoBuf);
mEventNotifier->setFrameProvider(mCameraAdapter);
//command thread
mCommandThread = new CommandThread(this);
mCommandThread->run("CameraCmdThread", ANDROID_PRIORITY_URGENT_DISPLAY);
bool dataCbFrontMirror;
bool dataCbFrontFlip;
#if CONFIG_CAMERA_FRONT_MIRROR_MDATACB
if (gCamInfos[cameraId].facing_info.facing == CAMERA_FACING_FRONT) {
#if CONFIG_CAMERA_FRONT_MIRROR_MDATACB_ALL
dataCbFrontMirror = true;
#else
const char* cameraCallProcess = getCallingProcess();
if (strstr(CONFIG_CAMERA_FRONT_MIRROR_MDATACB_APK,cameraCallProcess)) {
dataCbFrontMirror = true;
} else {
dataCbFrontMirror = false;
}
if (strstr(CONFIG_CAMERA_FRONT_FLIP_MDATACB_APK,cameraCallProcess)) {
dataCbFrontFlip = true;
} else {
dataCbFrontFlip = false;
}
#endif
} else {
dataCbFrontMirror = false;
dataCbFrontFlip = false;
}
#else
dataCbFrontMirror = false;
#endif
mEventNotifier->setDatacbFrontMirrorFlipState(dataCbFrontMirror,dataCbFrontFlip);
LOG_FUNCTION_NAME_EXIT
}
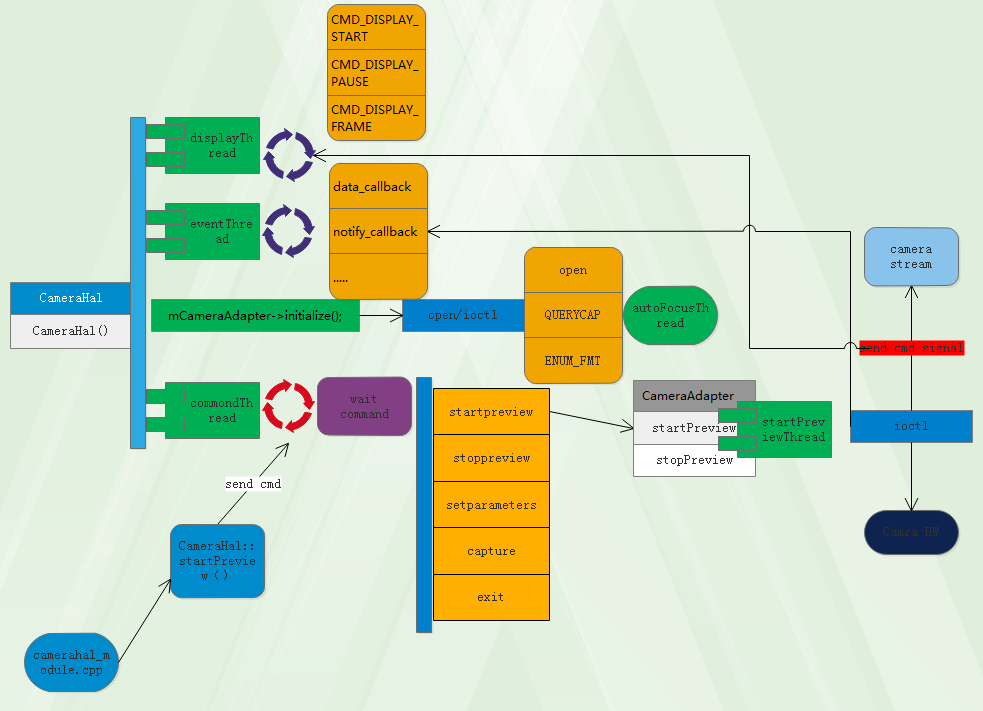
1.mDisplayAdapter = new DisplayAdapter(); 这里会启动一个线程,跟着进去看一下构造函数:
mDisplayThread = new DisplayThread(this);
mDisplayThread->run("DisplayThread",ANDROID_PRIORITY_DISPLAY);线程启动后会处于loop状态,等待其他线程发消息:
void DisplayAdapter::displayThread()
{
int err,stride,i,queue_cnt;
int dequeue_buf_index,queue_buf_index,queue_display_index;
buffer_handle_t *hnd = NULL;
NATIVE_HANDLE_TYPE *phnd;
GraphicBufferMapper& mapper = GraphicBufferMapper::get();
Message msg;
void *y_uv[3];
int frame_used_flag = -1;
Rect bounds;
LOG_FUNCTION_NAME
while (mDisplayRuning != STA_DISPLAY_STOP) {
display_receive_cmd:
if (displayThreadCommandQ.isEmpty() == false ) {
displayThreadCommandQ.get(&msg); 这个线程主要是用于显示用的,显示的地方也就是上层调用setPreviewTarget的时候,会把一个GraphicProducerBuffer类型的显示窗口buffer传下来。
2.mEventNotifier = new AppMsgNotifier();
对应的构造函数立面会启动两个线程:
//create thread
mCameraAppMsgThread = new CameraAppMsgThread(this);
mCameraAppMsgThread->run("AppMsgThread",ANDROID_PRIORITY_DISPLAY);
mEncProcessThread = new EncProcessThread(this);
mEncProcessThread->run("EncProcessThread",ANDROID_PRIORITY_NORMAL);第一个线程会比较重要,用来接收preview线程发过来的消息,通知这边向上回调数据:
void AppMsgNotifier::eventThread()
{
bool loop = true;
Message msg;
int index,err = 0;
FramInfo_s *frame = NULL;
int frame_used_flag = -1;
LOG_FUNCTION_NAME
while (loop) {
memset(&msg,0,sizeof(msg));
eventThreadCommandQ.get(&msg);
switch (msg.command)
{
case CameraAppMsgThread::CMD_EVENT_PREVIEW_DATA_CB:
frame = (FramInfo_s*)msg.arg2;
processPreviewDataCb(frame);
//return frame
frame_used_flag = (int)msg.arg3;
mFrameProvider->returnFrame(frame->frame_index,frame_used_flag);
break;
....
....
....至于cameraHAL层的消息发送机制,其实比较简单,是基于linux pipe实现的通信只针对两个进程之间。单向的通道。
第二个线程启动处理picture的线程,当我们按下拍照的按钮时就会发送cmd到这个线程上,这里会进行jpeg编解码相关操作,并保存到本地:
void AppMsgNotifier::encProcessThread()
{
bool loop = true;
Message msg;
int err = 0;
int frame_used_flag = -1;
LOG_FUNCTION_NAME
while (loop) {
memset(&msg,0,sizeof(msg));
encProcessThreadCommandQ.get(&msg); 3.接下来就是申请一些buffer的初始化了
4.选择camera类型的过程,这里涉及到了UVC camera,这里不同的选择,mCameraAdapter会被实例化成不同的cameraAdapter,其中的接口也就会变化。之后开始对camera初始化,
int CameraAdapter::initialize()
{
int ret = -1;
//create focus thread
LOG_FUNCTION_NAME
if((ret = cameraCreate(mCamId)) < 0)
return ret;
initDefaultParameters(mCamId);
LOG_FUNCTION_NAME_EXIT
return ret;
}第一个是create一个camera,这里会跟驱动进行交互,有实际的open动作,并得到fd保存起来,后面ioctl就会通过这个fd与驱动进行通信。
先看create:
//talk to driver
//open camera
int CameraAdapter::cameraCreate(int cameraId)
{
int err = 0,iCamFd;
int pmem_fd,i,j,cameraCnt;
char cam_path[20];
char cam_num[3];
char *ptr_tmp;
struct v4l2_fmtdesc fmtdesc;
char *cameraDevicePathCur = NULL;
char decode_name[50];
LOG_FUNCTION_NAME
memset(decode_name,0x00,sizeof(decode_name));
mLibstageLibHandle = dlopen("libstagefright.so", RTLD_NOW);
if (mLibstageLibHandle == NULL) {
LOGE("%s(%d): open libstagefright.so fail",__FUNCTION__,__LINE__);
} else {
mMjpegDecoder.get = (getMjpegDecoderFun)dlsym(mLibstageLibHandle, "get_class_On2JpegDecoder");
}
if (mMjpegDecoder.get == NULL) {
if (mLibstageLibHandle != NULL)
dlclose(mLibstageLibHandle); /* ddl@rock-chips.com: v0.4.0x27 */
mLibstageLibHandle = dlopen("librk_on2.so", RTLD_NOW);
if (mLibstageLibHandle == NULL) {
LOGE("%s(%d): open librk_on2.so fail",__FUNCTION__,__LINE__);
} else {
mMjpegDecoder.get = (getMjpegDecoderFun)dlsym(mLibstageLibHandle, "get_class_On2JpegDecoder");
if (mMjpegDecoder.get == NULL) {
LOGE("%s(%d): dlsym get_class_On2JpegDecoder fail",__FUNCTION__,__LINE__);
} else {
strcat(decode_name,"dec_oneframe_On2JpegDecoder");
}
}
} else {
strcat(decode_name,"dec_oneframe_class_On2JpegDecoder");
}
if (mMjpegDecoder.get != NULL) {
mMjpegDecoder.decoder = mMjpegDecoder.get();
if (mMjpegDecoder.decoder==NULL) {
LOGE("%s(%d): get mjpeg decoder failed",__FUNCTION__,__LINE__);
} else {
mMjpegDecoder.destroy =(destroyMjpegDecoderFun)dlsym(mLibstageLibHandle, "destroy_class_On2JpegDecoder");
if (mMjpegDecoder.destroy == NULL)
LOGE("%s(%d): dlsym destroy_class_On2JpegDecoder fail",__FUNCTION__,__LINE__);
mMjpegDecoder.init = (initMjpegDecoderFun)dlsym(mLibstageLibHandle, "init_class_On2JpegDecoder");
if (mMjpegDecoder.init == NULL)
LOGE("%s(%d): dlsym init_class_On2JpegDecoder fail",__FUNCTION__,__LINE__);
mMjpegDecoder.deInit =(deInitMjpegDecoderFun)dlsym(mLibstageLibHandle, "deinit_class_On2JpegDecoder");
if (mMjpegDecoder.deInit == NULL)
LOGE("%s(%d): dlsym deinit_class_On2JpegDecoder fail",__FUNCTION__,__LINE__);
mMjpegDecoder.decode =(mjpegDecodeOneFrameFun)dlsym(mLibstageLibHandle, decode_name);
if (mMjpegDecoder.decode == NULL)
LOGE("%s(%d): dlsym %s fail",__FUNCTION__,__LINE__,decode_name);
if ((mMjpegDecoder.deInit != NULL) && (mMjpegDecoder.init != NULL) &&
(mMjpegDecoder.destroy != NULL) && (mMjpegDecoder.decode != NULL)) {
mMjpegDecoder.state = mMjpegDecoder.init(mMjpegDecoder.decoder);
}
}
}
cameraDevicePathCur = (char*)&gCamInfos[cameraId].device_path[0];
iCamFd = open(cameraDevicePathCur, O_RDWR);
if (iCamFd < 0) {
LOGE("%s(%d): open camera%d(%s) is failed",__FUNCTION__,__LINE__,cameraId,cameraDevicePathCur);
goto exit;
}
memset(&mCamDriverCapability, 0, sizeof(struct v4l2_capability));
err = ioctl(iCamFd, VIDIOC_QUERYCAP, &mCamDriverCapability);
if (err < 0) {
LOGE("%s(%d): %s query device's capability failed.\n",__FUNCTION__,__LINE__,cam_path);
goto exit1;
}
LOGD("Camera driver: %s Driver version: %d.%d.%d CameraHal version: %d.%d.%d ",mCamDriverCapability.driver,
(mCamDriverCapability.version>>16) & 0xff,(mCamDriverCapability.version>>8) & 0xff,
mCamDriverCapability.version & 0xff,(CONFIG_CAMERAHAL_VERSION>>16) & 0xff,(CONFIG_CAMERAHAL_VERSION>>8) & 0xff,
CONFIG_CAMERAHAL_VERSION & 0xff);
memset(&fmtdesc, 0, sizeof(fmtdesc));
fmtdesc.index = 0;
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
while (ioctl(iCamFd, VIDIOC_ENUM_FMT, &fmtdesc) == 0) {
mCamDriverSupportFmt[fmtdesc.index] = fmtdesc.pixelformat;
LOGD("mCamDriverSupportFmt: fmt = %d,index = %d",fmtdesc.pixelformat,fmtdesc.index);
fmtdesc.index++;
}
i = 0;
while (CameraHal_SupportFmt[i]) {
LOG1("CameraHal_SupportFmt:fmt = %d,index = %d",CameraHal_SupportFmt[i],i);
j = 0;
while (mCamDriverSupportFmt[j]) {
if (mCamDriverSupportFmt[j] == CameraHal_SupportFmt[i]) {
if ((mCamDriverSupportFmt[j] == V4L2_PIX_FMT_MJPEG) && (mMjpegDecoder.state == -1))
continue;
break;
}
j++;
}
if (mCamDriverSupportFmt[j] == CameraHal_SupportFmt[i]) {
break;
}
i++;
}
if (CameraHal_SupportFmt[i] == 0x00) {
LOGE("%s(%d): all camera driver support format is not supported in CameraHal!!",__FUNCTION__,__LINE__);
j = 0;
while (mCamDriverSupportFmt[j]) {
LOG1("pixelformat = '%c%c%c%c'",
mCamDriverSupportFmt[j] & 0xFF, (mCamDriverSupportFmt[j] >> 8) & 0xFF,
(mCamDriverSupportFmt[j] >> 16) & 0xFF, (mCamDriverSupportFmt[j] >> 24) & 0xFF);
j++;
}
goto exit1;
} else {
mCamDriverPreviewFmt = CameraHal_SupportFmt[i];
LOGD("%s(%d): mCamDriverPreviewFmt(%c%c%c%c) is cameraHal and camera driver is also supported!!",__FUNCTION__,__LINE__,
mCamDriverPreviewFmt & 0xFF, (mCamDriverPreviewFmt >> 8) & 0xFF,
(mCamDriverPreviewFmt >> 16) & 0xFF, (mCamDriverPreviewFmt >> 24) & 0xFF);
LOGD("mCamDriverPreviewFmt = %d",mCamDriverPreviewFmt);
}
LOGD("%s(%d): Current driver is %s, v4l2 memory is %s",__FUNCTION__,__LINE__,mCamDriverCapability.driver,
(mCamDriverV4l2MemType==V4L2_MEMORY_MMAP)?"V4L2_MEMORY_MMAP":"V4L2_MEMORY_OVERLAY");
mCamFd = iCamFd;
//create focus thread for soc or usb camera.
mAutoFocusThread = new AutoFocusThread(this);
mAutoFocusThread->run("AutoFocusThread", ANDROID_PRIORITY_URGENT_DISPLAY);
mExitAutoFocusThread = false;
LOG_FUNCTION_NAME_EXIT
return 0;
exit1:
if (iCamFd > 0) {
close(iCamFd);
iCamFd = -1;
}
exit:
LOGE("%s(%d): exit with error -1",__FUNCTION__,__LINE__);
return -1;
}代码比较多,一步步分析:
1.第一部分主要是跟decoder编解码相关,这里暂时没深入,先跳过;
2.开始根据device name实际打开camera,这里的name早在之前initialize的时候被保存到cameraDevicePathCur = (char*)&gCamInfos[cameraId].device_path[0];
1)打开camera之后第一步先进性camera的能力查询:
err = ioctl(iCamFd, VIDIOC_QUERYCAP, &mCamDriverCapability);2)第二部列出camera支持的格式:
ioctl(iCamFd, VIDIOC_ENUM_FMT, &fmtdesc)3)最后将文件句柄保存到实例成员变量中:mCamFd = iCamFd;
3.启动自动对焦线程:
mAutoFocusThread = new AutoFocusThread(this);
mAutoFocusThread->run("AutoFocusThread", ANDROID_PRIORITY_URGENT_DISPLAY);继续回到initialize,会调用到初始化camera参数的设置
void CameraUSBAdapter::initDefaultParameters(int camFd)该接口代码多,这里就不贴出了主要是针对camera的参数设置,然后并保存当前的camera参数到一个实例中,方便后续上层在camera参数没有变化的情况下获取camera参数的时候就不要再与driver交互了;
下面列出主要设置的几个参数:
1.ioctl(mCamFd, VIDIOC_ENUM_FRAMESIZES, &fsize);获取camera的frame的参数,主要是长和宽等
不过RK这边preview的size被默认设置成640*480,这些都保存到了params实例中,里面保存着camera的所有参数,会先在这边初始化一遍。
2./* set framerate */ ret = ioctl(mCamFd, VIDIOC_S_PARM, &setfps);设置帧率到底层,并把这些设置保存到params中
3.ioctl(mCamFd, VIDIOC_QUERYCTRL, &whiteBalance) 设置白平衡相关参数
4.ioctl(mCamFd, VIDIOC_QUERYCTRL, &scene) 场景设置
5.ioctl(mCamFd, VIDIOC_QUERYCTRL, &anti_banding)) /anti-banding setting/
6.ioctl(mCamFd, VIDIOC_QUERYCTRL, &flashMode) /flash mode setting/
7./focus mode setting/ 不过这里被写死了在params中
8.ioctl(mCamFd, VIDIOC_QUERYCTRL, &facedetect) //hardware face detect settings
9.ioctl(mCamFd, VIDIOC_QUERYCTRL, &query_control) /Exposure setting/
………..
最后会统一调用cameraConfig(params,true,isRestartPreview);把刚才保存在params中的要设置的参数全部设置下去,以后上层的设置cmd也会调用到这个接口。
这个接口实现逻辑结构比较清楚,根据 标志进行设置,与driver进行交互
比如下面这个判断白平衡的:
params.get(CameraParameters::KEY_SUPPORTED_WHITE_BALANCE)这里就不具体分析了。
继续回到camerahal的初始化过程:
5.最后启动commandThread线程:
mCommandThread = new CommandThread(this);
mCommandThread->run("CameraCmdThread", ANDROID_PRIORITY_URGENT_DISPLAY);这个线程主要接收上层的各种cmd消息,比如startPreview,stopPreview,setParameters等cmd,然后根据对应的cmd进行下一步操作,如果是startPreview会启动一个preview的线程。
至此,cameraHal的初始化过程就完成了,具体是比较复杂了,这里只是简单讲了下比较重要的几个线程。接下来就在等待上层的操作了。
libcameraservice 到HAL层的接口实际上都是发送cmd的实现:
CameraHal_module.cpp中
int camera_start_preview(struct camera_device * device)
{
int rv = -EINVAL;
rk_camera_device_t* rk_dev = NULL;
LOGV("%s", __FUNCTION__);
if(!device)
return rv;
rk_dev = (rk_camera_device_t*) device;
rv = gCameraHals[rk_dev->cameraid]->startPreview();
return rv;
}
会调到:
int CameraHal::startPreview()
{
LOG_FUNCTION_NAME
Message msg;
Mutex::Autolock lock(mLock);
if ((mCommandThread != NULL)) {
msg.command = CMD_PREVIEW_START;
msg.arg1 = NULL;
setCamStatus(CMD_PREVIEW_START_PREPARE, 1);
commandThreadCommandQ.put(&msg);
}
// mPreviewCmdReceived = true;
setCamStatus(STA_PREVIEW_CMD_RECEIVED, 1);
LOG_FUNCTION_NAME_EXIT
return NO_ERROR ;
}中 commandThreadCommandQ.put(&msg); 就是像 commandThread中发送消息。
在函数commandThread中loop:
commandThreadCommandQ.get(&msg);//接收camera的cmd,也就是上层调用到下面的接口转换成cmd
case CMD_PREVIEW_START:
case CMD_PREVIEW_STOP:
case CMD_SET_PREVIEW_WINDOW:
case CMD_SET_PARAMETERS:
case CMD_PREVIEW_CAPTURE_CANCEL:
case CMD_CONTINUOS_PICTURE:
case CMD_AF_START:
case CMD_AF_CANCEL:
case CMD_EXIT:err=mCameraAdapter->startPreview(app_previw_w,app_preview_h,drv_w, drv_h, 0, false);mCameraAdapter是camera的适配器类,在CameraHal类构造函数初始化的时候就会选择好camera的类型,这里一般是UVC标准的camera。
err = mDisplayAdapter->startDisplay(app_previw_w, app_preview_h);这里是在开始preview线程之后会调用的开始显示的操作,最终会向displayThread发送msg:
int DisplayAdapter::startDisplay(int width, int height)
{
int err = NO_ERROR;
Message msg;
Semaphore sem;
LOG_FUNCTION_NAME
mDisplayLock.lock();
if (mDisplayRuning == STA_DISPLAY_RUNNING) {
LOGD("%s(%d): display thread is already run",__FUNCTION__,__LINE__);
goto cameraDisplayThreadStart_end;
}
mDisplayWidth = width;
mDisplayHeight = height;
setDisplayState(CMD_DISPLAY_START_PREPARE);
msg.command = CMD_DISPLAY_START;
sem.Create();
msg.arg1 = (void*)(&sem);
displayThreadCommandQ.put(&msg);
mDisplayCond.signal();
cameraDisplayThreadStart_end:
mDisplayLock.unlock();
if(msg.arg1){
sem.Wait();
if(mDisplayState != CMD_DISPLAY_START_DONE)
err = -1;
}
LOG_FUNCTION_NAME_EXIT
return err;
}下面是display的thread loop:
void DisplayAdapter::displayThread()
{
int err,stride,i,queue_cnt;
int dequeue_buf_index,queue_buf_index,queue_display_index;
buffer_handle_t *hnd = NULL;
NATIVE_HANDLE_TYPE *phnd;
GraphicBufferMapper& mapper = GraphicBufferMapper::get();
Message msg;
void *y_uv[3];
int frame_used_flag = -1;
Rect bounds;
LOG_FUNCTION_NAME
while (mDisplayRuning != STA_DISPLAY_STOP) {
display_receive_cmd:
if (displayThreadCommandQ.isEmpty() == false ) {
displayThreadCommandQ.get(&msg);
......
......接着看startPreview的过程,在:
status_t CameraAdapter::startPreview(int preview_w,int preview_h,int w, int h, int fmt,bool is_capture)
{
//create buffer
LOG_FUNCTION_NAME
unsigned int frame_size = 0,i;
struct bufferinfo_s previewbuf;
int ret = 0,buf_count = CONFIG_CAMERA_PREVIEW_BUF_CNT;
LOGD("%s%d:preview_w = %d,preview_h = %d,drv_w = %d,drv_h = %d",__FUNCTION__,__LINE__,preview_w,preview_h,w,h);
mPreviewFrameIndex = 0;
mPreviewErrorFrameCount = 0;
switch (mCamDriverPreviewFmt)
{
case V4L2_PIX_FMT_NV12:
case V4L2_PIX_FMT_YUV420:
frame_size = w*h*3/2;
break;
case V4L2_PIX_FMT_NV16:
case V4L2_PIX_FMT_YUV422P:
default:
frame_size = w*h*2;
break;
}
//for test capture
if(is_capture){
buf_count = 1;
}
if(mPreviewBufProvider->createBuffer(buf_count,frame_size,PREVIEWBUFFER) < 0)
{
LOGE("%s%d:create preview buffer failed",__FUNCTION__,__LINE__);
return -1;
}
//set size
if(cameraSetSize(w, h, mCamDriverPreviewFmt,is_capture)<0){
ret = -1;
goto start_preview_end;
}
mCamDrvWidth = w;
mCamDrvHeight = h;
mCamPreviewH = preview_h;
mCamPreviewW = preview_w;
memset(mPreviewFrameInfos,0,sizeof(mPreviewFrameInfos));
//camera start
if(cameraStart() < 0){
ret = -1;
goto start_preview_end;
}
//new preview thread
mCameraPreviewThread = new CameraPreviewThread(this);
mCameraPreviewThread->run("CameraPreviewThread",ANDROID_PRIORITY_DISPLAY);
mPreviewRunning = 1;
LOGD("%s(%d):OUT",__FUNCTION__,__LINE__);
return 0;
start_preview_end:
mCamDrvWidth = 0;
mCamDrvHeight = 0;
mCamPreviewH = 0;
mCamPreviewW = 0;
return ret;
}主要做了三件事1.根据fmt创建buffer并设置camerasize 2,开始camera之前的一些操作 3.启动preview线程
在cameraSetSize(w, h, mCamDriverPreviewFmt,is_capture)
int CameraAdapter::cameraSetSize(int w, int h, int fmt, bool is_capture)
{
int err=0;
struct v4l2_format format;
/* Set preview format */
format.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
format.fmt.pix.width = w;
format.fmt.pix.height = h;
format.fmt.pix.pixelformat = fmt;
format.fmt.pix.field = V4L2_FIELD_NONE; /* ddl@rock-chips.com : field must be initialised for Linux kernel in 2.6.32 */
LOGD("%s(%d):IN, w = %d,h = %d",__FUNCTION__,__LINE__,w,h);
if (is_capture) { /* ddl@rock-chips.com: v0.4.1 add capture and preview check */
format.fmt.pix.priv = 0xfefe5a5a;
} else {
format.fmt.pix.priv = 0x5a5afefe;
}
err = ioctl(mCamFd, VIDIOC_S_FMT, &format);
if ( err < 0 ){
LOGE("%s(%d): VIDIOC_S_FMT failed",__FUNCTION__,__LINE__);
} else {
LOG1("%s(%d): VIDIOC_S_FMT %dx%d '%c%c%c%c'",__FUNCTION__,__LINE__,format.fmt.pix.width, format.fmt.pix.height,
fmt & 0xFF, (fmt >> 8) & 0xFF,(fmt >> 16) & 0xFF, (fmt >> 24) & 0xFF);
}
return err;
}上面代码应该很熟悉了,先填充format这个结构体然后调用ioctl下去设置成功。
在cameraStart()中主要是申请buffer和映射的动作:
int CameraAdapter::cameraStart()
{
int preview_size,i;
int err;
int nSizeBytes;
int buffer_count;
struct v4l2_format format;
enum v4l2_buf_type type;
struct v4l2_requestbuffers creqbuf;
struct v4l2_buffer buffer;
CameraParameters tmpparams;
LOG_FUNCTION_NAME
buffer_count = mPreviewBufProvider->getBufCount();
creqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
creqbuf.memory = mCamDriverV4l2MemType;
creqbuf.count = buffer_count;
if (ioctl(mCamFd, VIDIOC_REQBUFS, &creqbuf) < 0) {
LOGE ("%s(%d): VIDIOC_REQBUFS Failed. %s",__FUNCTION__,__LINE__, strerror(errno));
goto fail_reqbufs;
}
if (buffer_count == 0) {
LOGE("%s(%d): preview buffer havn't alloced",__FUNCTION__,__LINE__);
goto fail_reqbufs;
}
memset(mCamDriverV4l2Buffer, 0x00, sizeof(mCamDriverV4l2Buffer));
for (int i = 0; i < buffer_count; i++) {
memset(&buffer, 0, sizeof(struct v4l2_buffer));
buffer.type = creqbuf.type;
buffer.memory = creqbuf.memory;
buffer.flags = 0;
buffer.index = i;
if (ioctl(mCamFd, VIDIOC_QUERYBUF, &buffer) < 0) {
LOGE("%s(%d): VIDIOC_QUERYBUF Failed",__FUNCTION__,__LINE__);
goto fail_bufalloc;
}
if (buffer.memory == V4L2_MEMORY_OVERLAY) {
buffer.m.offset = mPreviewBufProvider->getBufPhyAddr(i);
mCamDriverV4l2Buffer[i] = (char*)mPreviewBufProvider->getBufVirAddr(i);
} else if (buffer.memory == V4L2_MEMORY_MMAP) {
mCamDriverV4l2Buffer[i] = (char*)mmap(0 /* start anywhere */ ,
buffer.length, PROT_READ, MAP_SHARED, mCamFd,
buffer.m.offset);
if (mCamDriverV4l2Buffer[i] == MAP_FAILED) {
LOGE("%s(%d): Unable to map buffer(length:0x%x offset:0x%x) %s(err:%d)\n",__FUNCTION__,__LINE__, buffer.length,buffer.m.offset,strerror(errno),errno);
goto fail_bufalloc;
}
}
mCamDriverV4l2BufferLen = buffer.length;
mPreviewBufProvider->setBufferStatus(i, 1,PreviewBufferProvider::CMD_PREVIEWBUF_WRITING);
err = ioctl(mCamFd, VIDIOC_QBUF, &buffer);
if (err < 0) {
LOGE("%s(%d): VIDIOC_QBUF Failed,err=%d[%s]\n",__FUNCTION__,__LINE__,err, strerror(errno));
mPreviewBufProvider->setBufferStatus(i, 0,PreviewBufferProvider::CMD_PREVIEWBUF_WRITING);
goto fail_bufalloc;
}
}
mPreviewErrorFrameCount = 0;
mPreviewFrameIndex = 0;
cameraStream(true);
LOG_FUNCTION_NAME_EXIT
return 0;
fail_bufalloc:
mPreviewBufProvider->freeBuffer();
fail_reqbufs:
LOGE("%s(%d): exit with error(%d)",__FUNCTION__,__LINE__,-1);
return -1;
}申请buffer三部曲:
ioctl(mCamFd, VIDIOC_REQBUFS, &creqbuf)
ioctl(mCamFd, VIDIOC_QUERYBUF, &buffer)
ioctl(mCamFd, VIDIOC_QBUF, &buffer);
一切就绪后调用cameraStream(true);开始stream:
int CameraAdapter::cameraStream(bool on)
{
int err = 0;
int cmd ;
enum v4l2_buf_type type;
LOGD("%s(%d):on = %d",__FUNCTION__,__LINE__,on);
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
cmd = (on)?VIDIOC_STREAMON:VIDIOC_STREAMOFF;
mCamDriverStreamLock.lock();
mCamDriverStream = on;
err = ioctl(mCamFd, cmd, &type);
if (err < 0) {
LOGE("%s(%d): %s Failed",__FUNCTION__,__LINE__,((on)?"VIDIOC_STREAMON":"VIDIOC_STREAMOFF"));
goto cameraStream_end;
}
//mCamDriverStream = on;
cameraStream_end:
mCamDriverStreamLock.unlock();
return err;
}这样camera的所有初始化准备就都完成了,后面要获取数据只需要跟driver进行queue buffer和deque buffer操作即可。
继续回到startPreview:
mCameraPreviewThread = new CameraPreviewThread(this);
mCameraPreviewThread->run("CameraPreviewThread",ANDROID_PRIORITY_DISPLAY);启动preview的线程:
void CameraAdapter::previewThread(){
bool loop = true;
FramInfo_s* tmpFrame = NULL;
int buffer_log = 0;
int ret = 0;
while(loop){
//get a frame
//fill frame info
//dispatch a frame
tmpFrame = NULL;
mCamDriverStreamLock.lock();
if (mCamDriverStream == false) {
mCamDriverStreamLock.unlock();
break;
}
mCamDriverStreamLock.unlock();
ret = getFrame(&tmpFrame);
// LOG2("%s(%d),frame addr = %p,%dx%d,index(%d)",__FUNCTION__,__LINE__,tmpFrame,tmpFrame->frame_width,tmpFrame->frame_height,tmpFrame->frame_index);
if((ret!=-1) && (!camera_device_error) && (mCamDriverStream == true)){
mPreviewBufProvider->setBufferStatus(tmpFrame->frame_index, 0,PreviewBufferProvider::CMD_PREVIEWBUF_WRITING);
//set preview buffer status
ret = reprocessFrame(tmpFrame);
if(ret < 0){
returnFrame(tmpFrame->frame_index,buffer_log);
continue;
}
buffer_log = 0;
//display ?
if(mRefDisplayAdapter->isNeedSendToDisplay())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_DISPING;
//video enc ?
if(mRefEventNotifier->isNeedSendToVideo())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_VIDEO_ENCING;
//picture ?
if(mRefEventNotifier->isNeedSendToPicture())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_SNAPSHOT_ENCING;
//preview data callback ?
if(mRefEventNotifier->isNeedSendToDataCB())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_DATACB;
mPreviewBufProvider->setBufferStatus(tmpFrame->frame_index,1,buffer_log);
if(buffer_log & PreviewBufferProvider::CMD_PREVIEWBUF_DISPING){
tmpFrame->used_flag = PreviewBufferProvider::CMD_PREVIEWBUF_DISPING;
mRefDisplayAdapter->notifyNewFrame(tmpFrame);
}
if(buffer_log & (PreviewBufferProvider::CMD_PREVIEWBUF_SNAPSHOT_ENCING)){
tmpFrame->used_flag = PreviewBufferProvider::CMD_PREVIEWBUF_SNAPSHOT_ENCING;
mRefEventNotifier->notifyNewPicFrame(tmpFrame);
}
if(buffer_log & (PreviewBufferProvider::CMD_PREVIEWBUF_VIDEO_ENCING)){
tmpFrame->used_flag = PreviewBufferProvider::CMD_PREVIEWBUF_VIDEO_ENCING;
mRefEventNotifier->notifyNewVideoFrame(tmpFrame);
}
if(buffer_log & (PreviewBufferProvider::CMD_PREVIEWBUF_DATACB)){
tmpFrame->used_flag = PreviewBufferProvider::CMD_PREVIEWBUF_DATACB;
mRefEventNotifier->notifyNewPreviewCbFrame(tmpFrame);
}
if(buffer_log == 0)
returnFrame(tmpFrame->frame_index,buffer_log);
}else if(camera_device_error){
//notify app erro
break;
}else if((ret==-1) && (!camera_device_error)){
if(tmpFrame)
returnFrame(tmpFrame->frame_index,buffer_log);
}
}
LOG_FUNCTION_NAME_EXIT
return;
}这个函数刚开始会把一个地址传下去从摄像头获取数据frame:
ret = getFrame(&tmpFrame);
在int CameraAdapter::getFrame(FramInfo_s** tmpFrame){}这个函数里调用ioctl等操作,获取frame数据。
回到preview的线程,先会判断:
//display ?
if(mRefDisplayAdapter->isNeedSendToDisplay())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_DISPING;
因为是预览过程所以会进到这个if分之,并不会向上回调数据,会触发之前初始化好的display线程。
//video enc ?
if(mRefEventNotifier->isNeedSendToVideo())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_VIDEO_ENCING;
录视频的时候会进到这个分之,会触发dataCallbackTimesStamp这个回调
//picture ?
if(mRefEventNotifier->isNeedSendToPicture())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_SNAPSHOT_ENCING;
当进行拍照动作的时候会进到这个分之,并会触发EncProcessThread这个线程,主要处理picture的一些编解码保存动作
//preview data callback ?
if(mRefEventNotifier->isNeedSendToDataCB())
buffer_log |= PreviewBufferProvider::CMD_PREVIEWBUF_DATACB;
preview 的data需要回调的时候会进到这里,不过RK的代码预览的时候并不会回调数据,而是直接显示了,所以这里可以根据需要改动。不过我还是要讲一下这个回调的过程,比较具有代表性,前面文章也具体说明了这个回调的数据流走向:
if(buffer_log & (PreviewBufferProvider::CMD_PREVIEWBUF_DATACB)){
tmpFrame->used_flag = PreviewBufferProvider::CMD_PREVIEWBUF_DATACB;
mRefEventNotifier->notifyNewPreviewCbFrame(tmpFrame);
}这个是像上层抛callback的过程:
void AppMsgNotifier::notifyNewPreviewCbFrame(FramInfo_s* frame)
{
//send to app msg thread
Message msg;
Mutex::Autolock lock(mDataCbLock);
if(mRunningState & STA_RECEIVE_PREVIEWCB_FRAME){
msg.command = CameraAppMsgThread::CMD_EVENT_PREVIEW_DATA_CB;
msg.arg2 = (void*)(frame);
msg.arg3 = (void*)(frame->used_flag);
eventThreadCommandQ.put(&msg);
}else
mFrameProvider->returnFrame(frame->frame_index,frame->used_flag);
}也是向一个线程投递消息包消息包里面包含数据帧。
下面是接受消息的thread loop:这个线程是在cameraHAL构造函数初始化的时候启动的。
void AppMsgNotifier::eventThread()
{
bool loop = true;
Message msg;
int index,err = 0;
FramInfo_s *frame = NULL;
int frame_used_flag = -1;
LOG_FUNCTION_NAME
while (loop) {
memset(&msg,0,sizeof(msg));
eventThreadCommandQ.get(&msg);
switch (msg.command)
{
case CameraAppMsgThread::CMD_EVENT_PREVIEW_DATA_CB:
frame = (FramInfo_s*)msg.arg2;
processPreviewDataCb(frame);
//return frame
frame_used_flag = (int)msg.arg3;
mFrameProvider->returnFrame(frame->frame_index,frame_used_flag);
break;
case CameraAppMsgThread::CMD_EVENT_VIDEO_ENCING:
frame_used_flag = (int)msg.arg3;
frame = (FramInfo_s*)msg.arg2;
LOG2("%s(%d):get new frame , index(%d),useflag(%d)",__FUNCTION__,__LINE__,frame->frame_index,frame_used_flag);
processVideoCb(frame);
//return frame
mFrameProvider->returnFrame(frame->frame_index,frame_used_flag);
break;
case CameraAppMsgThread::CMD_EVENT_PAUSE:
{
Message filter_msg;
LOG1("%s(%d),receive CameraAppMsgThread::CMD_EVENT_PAUSE",__FUNCTION__,__LINE__);
while(!eventThreadCommandQ.isEmpty()){
encProcessThreadCommandQ.get(&filter_msg);
if((filter_msg.command == CameraAppMsgThread::CMD_EVENT_PREVIEW_DATA_CB)
||(filter_msg.command == CameraAppMsgThread::CMD_EVENT_VIDEO_ENCING)){
FramInfo_s *frame = (FramInfo_s*)msg.arg2;
mFrameProvider->returnFrame(frame->frame_index,frame->used_flag);
}
}
if(msg.arg1)
((Semaphore*)(msg.arg1))->Signal();
//wake up waiter
break;
}
case CameraAppMsgThread::CMD_EVENT_EXIT:
{
loop = false;
if(msg.arg1)
((Semaphore*)(msg.arg1))->Signal();
break;
}
default:
break;
}
}
LOG_FUNCTION_NAME_EXIT
return;
}数据回调走的是 第一个case会调用到:processPreviewDataCb(frame);
int AppMsgNotifier::processPreviewDataCb(FramInfo_s* frame){
int ret = 0;
mDataCbLock.lock();
if ((mMsgTypeEnabled & CAMERA_MSG_PREVIEW_FRAME) && mDataCb) {
//compute request mem size
int tempMemSize = 0;
//request bufer
camera_memory_t* tmpPreviewMemory = NULL;
if (strcmp(mPreviewDataFmt,android::CameraParameters::PIXEL_FORMAT_RGB565) == 0) {
tempMemSize = mPreviewDataW*mPreviewDataH*2;
} else if (strcmp(mPreviewDataFmt,android::CameraParameters::PIXEL_FORMAT_YUV420SP) == 0) {
tempMemSize = mPreviewDataW*mPreviewDataH*3/2;
} else if (strcmp(mPreviewDataFmt,android::CameraParameters::PIXEL_FORMAT_YUV422SP) == 0) {
tempMemSize = mPreviewDataW*mPreviewDataH*2;
} else if(strcmp(mPreviewDataFmt,android::CameraParameters::PIXEL_FORMAT_YUV420P) == 0){
tempMemSize = ((mPreviewDataW+15)&0xfffffff0)*mPreviewDataH
+((mPreviewDataW/2+15)&0xfffffff0)*mPreviewDataH;
}else {
LOGE("%s(%d): pixel format %s is unknow!",__FUNCTION__,__LINE__,mPreviewDataFmt);
}
mDataCbLock.unlock();
tmpPreviewMemory = mRequestMemory(-1, tempMemSize, 1, NULL);
if (tmpPreviewMemory) {
//fill the tmpPreviewMemory
if (strcmp(mPreviewDataFmt,android::CameraParameters::PIXEL_FORMAT_YUV420P) == 0) {
cameraFormatConvert(V4L2_PIX_FMT_NV12,0,mPreviewDataFmt,
(char*)frame->vir_addr,(char*)tmpPreviewMemory->data,0,0,tempMemSize,
frame->frame_width, frame->frame_height,frame->frame_width,
//frame->frame_width,frame->frame_height,frame->frame_width,false);
mPreviewDataW,mPreviewDataH,mPreviewDataW,mDataCbFrontMirror);
}else {
#if 0
//QQ voip need NV21
arm_camera_yuv420_scale_arm(V4L2_PIX_FMT_NV12, V4L2_PIX_FMT_NV21, (char*)(frame->vir_addr),
(char*)tmpPreviewMemory->data,frame->frame_width, frame->frame_height,mPreviewDataW, mPreviewDataH,mDataCbFrontMirror,frame->zoom_value);
#else
rga_nv12_scale_crop(frame->frame_width, frame->frame_height,
(char*)(frame->vir_addr), (short int *)(tmpPreviewMemory->data),
mPreviewDataW,mPreviewDataW,mPreviewDataH,frame->zoom_value,mDataCbFrontMirror,true,true);
#endif
//arm_yuyv_to_nv12(frame->frame_width, frame->frame_height,(char*)(frame->vir_addr), (char*)buf_vir);
}
if(mDataCbFrontFlip) {
LOG1("----------------need flip -------------------");
YuvData_Mirror_Flip(V4L2_PIX_FMT_NV12, (char*) tmpPreviewMemory->data,
(char*)frame->vir_addr,mPreviewDataW, mPreviewDataH);
}
//callback
mDataCb(CAMERA_MSG_PREVIEW_FRAME, tmpPreviewMemory, 0,NULL,mCallbackCookie);
//release buffer
tmpPreviewMemory->release(tmpPreviewMemory);
} else {
LOGE("%s(%d): mPreviewMemory create failed",__FUNCTION__,__LINE__);
}
} else {
mDataCbLock.unlock();
LOG1("%s(%d): needn't to send preview datacb",__FUNCTION__,__LINE__);
}
return ret;
}当中会对frame做一些转化,然后直接调用之前注册好的callback回调给上层:
//callback
mDataCb(CAMERA_MSG_PREVIEW_FRAME, tmpPreviewMemory, 0,NULL,mCallbackCookie); 传的参数第一个是回调数据的类型,第二个就是数据帧的虚拟地址了。
这个函数会根据之前注册回调的路径一直往上层回调到APP层。














 3934
3934











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









