







我就是想要类似:https://www.pyimagesearch.com/2015/11/02/watershed-opencv/ 这个的效果,将重叠的轮廓分割开成单独的轮廓。

复杂粘连轮廓的处理,要将粘连的轮廓分开,公司的大神用的是轮廓的缺陷点检测,但他的这个算法我看了下,有的凹点会检测不到,所以有的粘连的地方仍然分不开:
 像这里有6块石头粘连在一起,有的凹陷点就检测不出来。。。
像这里有6块石头粘连在一起,有的凹陷点就检测不出来。。。
我看了下谷歌上有人用的:

这个我想试试。
import numpy as np
import matplotlib.pyplot as plt
from scipy import ndimage as ndi
from skimage import morphology,feature
#创建两个带有重叠圆的图像
x, y = np.indices((80, 80))
x1, y1, x2, y2 = 28, 28, 44, 52
r1, r2 = 16, 20
mask_circle1 = (x - x1)**2 + (y - y1)**2 < r1**2
mask_circle2 = (x - x2)**2 + (y - y2)**2 < r2**2
image = np.logical_or(mask_circle1, mask_circle2)
#现在我们用分水岭算法分离两个圆
distance = ndi.distance_transform_edt(image) #距离变换
local_maxi =feature.peak_local_max(distance, indices=False, footprint=np.ones((3, 3)),
labels=image) #寻找峰值
markers = ndi.label(local_maxi)[0] #初始标记点
labels =morphology.watershed(-distance, markers, mask=image) #基于距离变换的分水岭算法
fig, axes = plt.subplots(nrows=2, ncols=2, figsize=(8, 8))
axes = axes.ravel()
ax0, ax1, ax2, ax3 = axes
ax0.imshow(image, cmap=plt.cm.gray, interpolation='nearest')
ax0.set_title("Original")
#ax1.imshow(-distance, cmap=plt.cm.jet, interpolation='nearest')
#ax1.set_title("Distance")
ax1.imshow(distance, cmap=plt.cm.gray, interpolation='nearest')
ax1.set_title("Distance")
ax2.imshow(markers, cmap=plt.cm.spectral, interpolation='nearest')
ax2.set_title("Markers")
ax3.imshow(labels, cmap=plt.cm.spectral, interpolation='nearest')
ax3.set_title("Segmented")
for ax in axes:
ax.axis('off')
fig.tight_layout()
plt.show()但我看了下:distance_transform_edt()这个函数的意思:
Notes
-----
The euclidean distance transform gives values of the euclidean
distance::
n
y_i = sqrt(sum (x[i]-b[i])**2)
i
where b[i] is the background point (value 0) with the smallest
Euclidean distance to input points x[i], and n is the
number of dimensions.
Examples
--------
>>> from scipy import ndimage
>>> a = np.array(([0,1,1,1,1],
... [0,0,1,1,1],
... [0,1,1,1,1],
... [0,1,1,1,0],
... [0,1,1,0,0]))
>>> ndimage.distance_transform_edt(a)
array([[ 0. , 1. , 1.4142, 2.2361, 3. ],
[ 0. , 0. , 1. , 2. , 2. ],
[ 0. , 1. , 1.4142, 1.4142, 1. ],
[ 0. , 1. , 1.4142, 1. , 0. ],
[ 0. , 1. , 1. , 0. , 0. ]])直接可以用OpenCV中的distanceTransform()代替,效果一致。
 这个粘连的,下图就是距离变换与python的第二幅图一致。
这个粘连的,下图就是距离变换与python的第二幅图一致。
但寻找局部峰值的那个函数:feature.peak_local_max()就有点难办了。。。我试过用minMaxLoc找到全局最大max,然后按0.9*max找到几个极大值!但这是不对的,理论上就不对,高中三角函数学过极大值可能比最大值的0.9倍甚至0.5倍都小,它们之间没有什么关系的。。。所以不行。
我用了另一种方法:
void localMaxima(Mat src,const int maxZeroSize,const double minPeakValue,vector<Point> &maxLocpts)
{
double minVal=0,maxVal=0,diff=0;
Point minLocPt,maxLocPt;
minMaxLoc(src,&minVal,&maxVal,&minLocPt,&maxLocPt);//计算最大值
while(maxVal>minPeakValue)
{
maxLocpts.push_back(maxLocPt);
Mat rect_part = src(Rect(maxLocPt.x-maxZeroSize,maxLocPt.y-maxZeroSize,2*maxZeroSize,2*maxZeroSize));
rect_part.setTo(Scalar(0));
//imwrite("temp_peak.jpg",src);
minMaxLoc(src,&minVal,&maxVal,&minLocPt,&maxLocPt);//计算极大值
}
}然后:
int main()
{
char src_folder[100];
char dst_folder[100];
const size_t img_rows=1456;
const size_t img_cols=1936;
int threshold_value=150;
int element_size=3;//morph element size
int blurwidth=3; //blur window size
const int area_min=90; //area<area_min,delete it.
int area_limitable=5800; //area<area_limitable,need judge
const int area_max=15000;
int rect_radius_contour=50; //around the contour :neighbors
Mat element=getStructuringElement(MORPH_RECT,Size(2*element_size+1,2*element_size+1),
Point(element_size,element_size));
Mat morph_img(img_rows,img_cols,CV_8UC1);
morph_img=imread("/home/jumper/Ore_projects/ore_granule/tempBinary.jpg",0);
threshold(morph_img,morph_img,1,128,CV_THRESH_BINARY);
Mat distance_img(img_rows,img_cols,CV_32FC1);
distanceTransform(morph_img,distance_img,CV_DIST_L2,3);
//imwrite("distance.jpg",distance_img);
vector<Point> peakpts;
localMaxima(distance_img,70,80,peakpts);
// Mat peakimgs(img_rows,img_cols,CV_8UC1,Scalar(0));
// cout<<"peak num: "<<peakpts.size()<<endl;
// for(int index=0;index<=peakpts.size();index++)
// {
// circle(peakimgs,peakpts[index],5,CV_RGB(255,255,255),2);
// }
// imwrite("peakimg2.jpg",peakimgs);
//marker...
Mat marker(img_rows,img_cols,CV_32SC1,Scalar(0));
for(int index=0;index!=peakpts.size();index++)
{
int row=peakpts[index].y;
int col=peakpts[index].x;
Mat rect_part = marker(Rect(col-70,row-70,2*70,2*70));
rect_part.setTo(short(index+1));
//marker.ptr<short>(row)[col]=index+1;
}
// imwrite("marker.jpg",marker);
Mat src_img(img_rows,img_cols,CV_8UC3);
src_img=imread("/home/jumper/Ore_projects/ore_granule/22db_1.bmp");
Mat water_src(img_rows,img_cols,CV_8UC3);
src_img.copyTo(water_src,morph_img);
// imwrite("water_src.jpg",water_src);
watershed(water_src,marker);
Mat contrast_img(img_rows,img_cols,CV_8UC1,Scalar(0));
for(int r=0;r!=marker.rows;r++)
{
for(int c=0;c!=marker.cols;c++)
{
if(marker.ptr<short>(r)[c]==-1)
{
circle(contrast_img,Point(c,r),5,CV_RGB(255,255,255),2);
}
}
}
imwrite("contrast_img.jpg",contrast_img);
//marker.convertTo(marker,CV_8UC1);
//imwrite("watershed.jpg",marker);
return 0;
}我的确得到了那两个极大值点:

我怕就2个点作为初始标记点太寒酸,我还特意将这两个点附近一块地方标记为1和2:显示画出来就是这样!

然后就可以运行分水岭分割了:这是原图部分:

but I got nothing!!!
没有正确分割 没有得到我想要的!!!????
后来我又用了传说中的grabCut()算法,通过给它赋予可能的前景以及确定的前景和确定的背景,让它找到真正的前景,,,然而。。。不过可能是我操作的问题咯。
最后我用了另一种方法,既然我找到了盆地的聚水点(不知道是不是这个名词),那我找这个聚水点距离整个轮廓最近的两条边作为它的rect:
这还是不完善的版本,因为图像的长宽限制没加进去。。。在几处地方都还没做限制,因为我还只是试试效果而已。。。
#include<opencv2/opencv.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<iostream>
#include<fstream>
#include <vector>
using namespace cv;
using namespace std;
void localMaxima(Mat src,const int maxZeroSize,const double minPeakValue,vector<Point> &maxLocpts);
int main()
{
char src_folder[100];
char dst_folder[100];
const size_t img_rows=1456;
const size_t img_cols=1936;
int blurwidth=3;
Mat background_img(img_rows,img_cols,CV_8UC3);
background_img=imread("/home/jumper/Ore_projects/ore_granule/imgs/1204-backgrond/back.bmp");
Mat src_img(img_rows,img_cols,CV_8UC3);
for(int ind=1;ind!=6;ind++)
{
cout<<"proceed "<<ind<<endl;
sprintf(src_folder,"/home/jumper/Ore_projects/ore_granule/imgs/1204/22db_%d.bmp",ind);
src_img=imread(src_folder);
src_img=background_img-src_img;
cvtColor(src_img,src_img,CV_BGR2HSV);
vector<Mat> hsvmats(3);
split(src_img,hsvmats);
Mat vimg=hsvmats[2];
threshold(vimg,vimg,110,255,CV_THRESH_BINARY);
medianBlur(vimg,vimg,blurwidth);
// sprintf(dst_folder,"/home/jumper/Ore_projects/ore_granule/1204result/%d.jpg",ind);
// imwrite(dst_folder,vimg);
Mat contours_img(img_rows,img_cols,CV_8UC1,Scalar(0));
vector<vector<Point> > contours;
findContours( vimg, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE );
cv::Rect rectangle;
Mat contours_img2(img_rows,img_cols,CV_8UC1,Scalar(0));
for (int i = 0; i< contours.size(); i++)
{
contours_img2.setTo(Scalar(0));
vector<Point> pts;
vector<Point> result;
double area=cv::contourArea(contours[i]);
if(area<490)
{
continue;
}
cv::drawContours(contours_img,contours,i,Scalar(255),CV_FILLED);
cv::drawContours(contours_img2,contours,i,Scalar(255),CV_FILLED);
rectangle=cv::boundingRect(contours[i]);
if(area<44000)
{
cv::rectangle(contours_img,rectangle,Scalar(255),2);
continue;
}
Mat distance_img(rectangle.height,rectangle.width,CV_32FC1);
distanceTransform(contours_img2,distance_img,CV_DIST_L2,3);
vector<Point> peakpts;
localMaxima(distance_img,70,80,peakpts);
if(peakpts.size()==0)
{
continue;
}
Mat peakimgs(img_rows,img_cols,CV_8UC1,Scalar(0));
cout<<"peak num: "<<peakpts.size()<<endl;
for(int index=0;index<=peakpts.size();index++)
{
circle(peakimgs,peakpts[index],5,Scalar(255),2);
}
int col_left=rectangle.x;
int col_right=rectangle.x+rectangle.width;
int row_up=rectangle.y;
int row_bottom=rectangle.y+rectangle.height;
for(int index=0;index!=peakpts.size();index++)
{
int row=peakpts[index].y;
int col=peakpts[index].x;
int col_left_distance=col-col_left;
int col_right_distance=col_right-col;
int row_up_distance=row-row_up;
int row_bottom_distance=row_bottom-row;
int rect_height=min(row_up_distance,row_bottom_distance);
int rect_width=min(col_left_distance,col_right_distance);
cv::Point start_pt(col-rect_width,row-rect_height);
cv::Point end_pt(col+rect_width,row+rect_height);
cv::rectangle(contours_img,start_pt,end_pt,Scalar(255),2);
circle(contours_img,peakpts[index],5,Scalar(0),2);
}
}
sprintf(dst_folder,"/home/jumper/Ore_projects/ore_granule/1204result/%d_rect.jpg",ind);
imwrite(dst_folder,contours_img);
}
return 0;
}
void localMaxima(Mat src,const int maxZeroSize,const double minPeakValue,vector<Point> &maxLocpts)
{
double minVal=0,maxVal=0,diff=0;
Point minLocPt,maxLocPt;
minMaxLoc(src,&minVal,&maxVal,&minLocPt,&maxLocPt);//计算最大值
while(maxVal>minPeakValue)
{
maxLocpts.push_back(maxLocPt);
Mat rect_part = src(Rect(maxLocPt.x-maxZeroSize,maxLocPt.y-maxZeroSize,2*maxZeroSize,2*maxZeroSize));
rect_part.setTo(Scalar(0));
//imwrite("temp_peak.jpg",src);
minMaxLoc(src,&minVal,&maxVal,&minLocPt,&maxLocPt);//计算极大值
}
}
黑色的圈是peak点:
 这是结果。
这是结果。
但可能阈值等还要调整,效果还不够好:



这样子不够准确而且有的会有丢失。。。



我再想想。。。



路漫漫。。。
今天调整了下值:





not enough...







不稳妥。。。
修改后:

 但如果有大量粘连的情况还是不够好,当大量粘连时我的质心点会有点多,也就是这个距离变换还不够。。。还要不断改善。
但如果有大量粘连的情况还是不够好,当大量粘连时我的质心点会有点多,也就是这个距离变换还不够。。。还要不断改善。
今天是2019.2.18,看到了一种改善的分水岭效果:

同时发现分水岭来切割粘连图像比较适合于目标差不多大小的情况,如果大小相差悬殊,则不适合,分割不开!

看这幅图虽然右边不是最后的结果,但也是结果的原型,可以看到有的分割开的都是因为目标相差不大,而分割不开的基本都是
要么粘连特别紧密,要么粘连没有那么紧密但是大小相差较大
调节抑制局部极小值后:还是有分不开的很多。
bw0 = imread('G:\src.png');
%bw=imdilate(bw0,ones(3));
bw=im2bw(bw0);
imshow(bw,[]);
D = -bwdist(~bw);
figure;
imshow(D,[]);
mask = imextendedmin(D,2);
figure;
imshow(mask,[]);
imshowpair(bw,mask,'blend');
D2 = imimposemin(D,mask);
Ld2 = watershed(D2);
bw3 = bw;
bw3(Ld2 == 0) = 0;
figure;
imshow(bw3);等等,我发现一个地方我错了,对于函数imextendedmin(D,4).我以为是对距离变换后的图像D,对每一个连通域,取其数值整数大于前4个的置1.结果发现不是!!
 imextendedmin(D,4).的结果是这样,看我用笔画出来的这个连通域,这个连通域的数值是:
imextendedmin(D,4).的结果是这样,看我用笔画出来的这个连通域,这个连通域的数值是:

看数值,这个连通域经过这个函数后应该大于4、5、6、7的值位置都置1,也就是这个大的连通域应该被分为2个小的置1的块。但经过这个函数后的结果是:

结果只有1个小块,所以也就是我用笔画出来的那样,所以后面用分水岭也是分不开这个粘连体的。
所以我要改造一下这个函数,让它按我以为的那样实现。得到类似各个石头的核心区域mask。
1:然后我看了一下函数D2=imimposemin(D,mask);的源码,这个函数的意思是:强制最小。D是距离变换结果,令fm=mask;且fm核心区域即为1的地方全部置为-Inf即负无穷大;为0的地方置为正无穷大Inf;
2:距离变换图像D的最大值max-最小值min的绝对值为range,如果range不等于0,则h=range*0.001;否则为0.1;
3:修改距离变换的结果fp1=D+h 即给距离变换的值都加上常数h。注意Matlab的距离变换结果是负数D的值都是负的。如果转opencv要注意;
4:g=min(fp1,fm);所以此时图像g中要么是负无穷大代表的每个目标的核心区域,要么就是别的数值代表的背景以及目标的边缘包含粘连边缘;
5:对fm取反得到fm2,对g取反得到g2;g2=1-g;
6:对fm2,g2,以8连通域做形态学重建J=imreconstruct(fm2,g2,8);这个函数我追源码追不下去了,只看到J根g2其实差不多,但也有差别,这个差别就是形态学重建导致的,而形态学重建究竟是怎么实现的 我不知道!?
7:Ld2=1-J; 对Ld2进行分水岭 。Ld3=watershed(Ld2);即Ld3==0的位置就是各个粘连目标的分界线;其它都是正整数表示不同的区域。
8:对于最原始的粘连图像bw(Ld3==0)=0;这样就分开了粘连目标。
但opencv的实现我还在写。
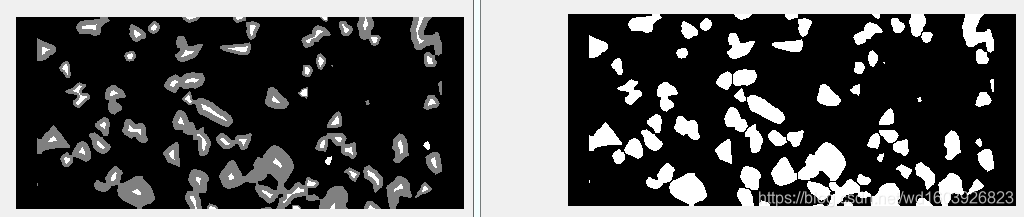
我发现另一个更好的算法,而且可并行。中间是原版效果,最后一个是现在的效果:


















 652
652

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











