







第一行敬度娘
首先是Vuforia官方文档英文说水平好的或者有翻译工具的点这里
接下来是懒人教程
首先下载插件(2017版本的集成了就不用下了)
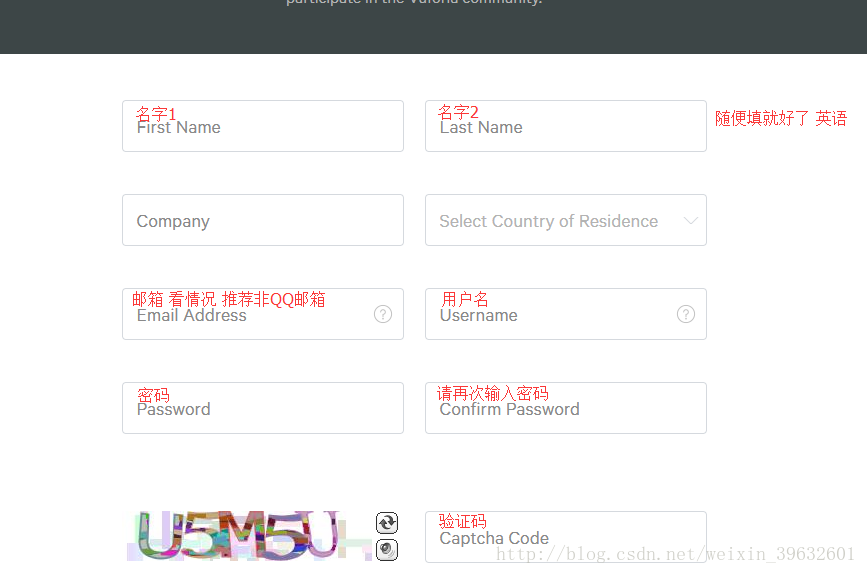
然后注册高通账号(估计看这里的人应该都有了我依旧贴个注册
之后进入你的管理界面
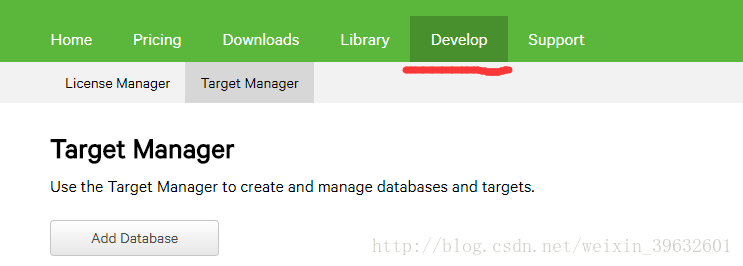
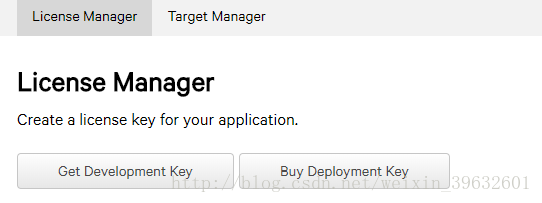
完事你就能看到
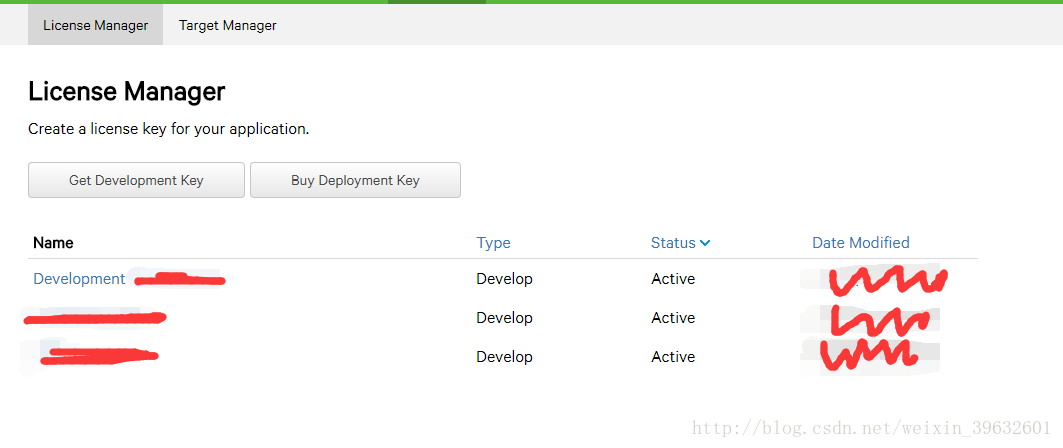
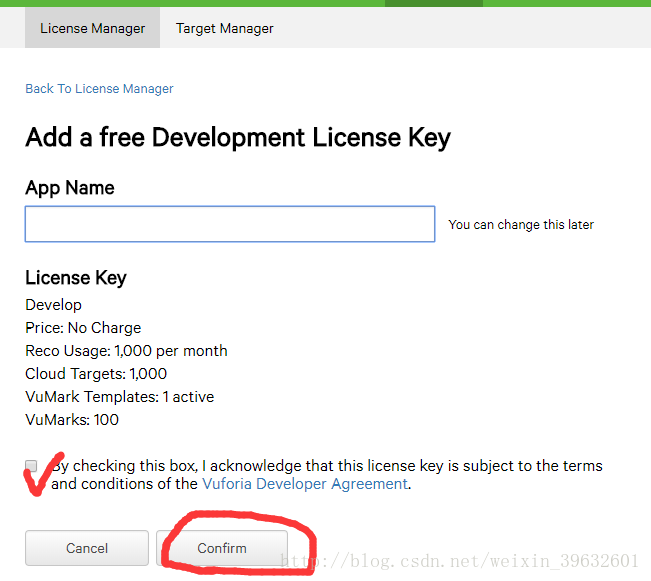
点击进去
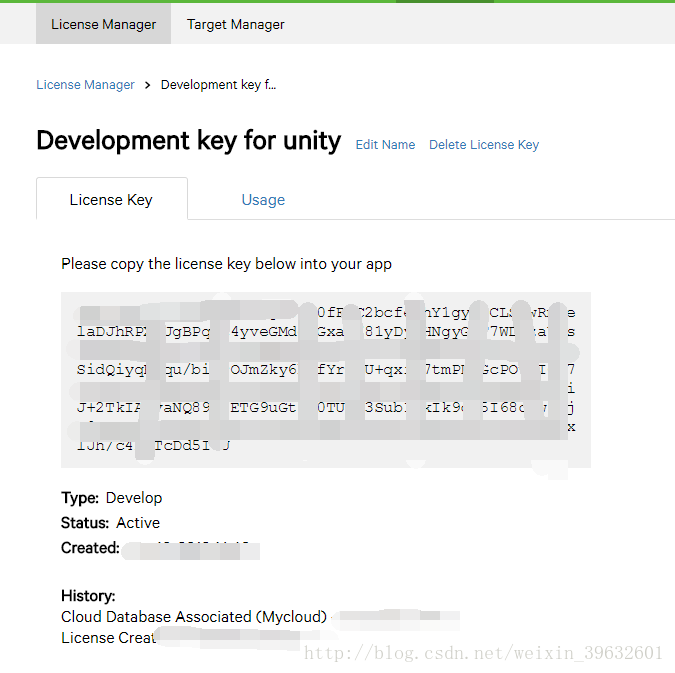
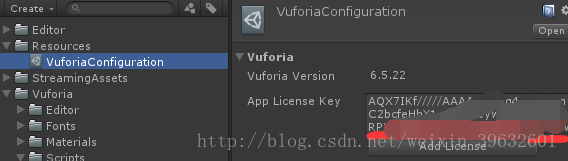
把这个key粘到Unity的VuforiaConfiguration的AppLicenseKey里就可以了
然后之前的准备工作就OK了 因为我这里主要是讲云识别所以本地识别的方法我就赘述了自行百度就可以了。
接下来 我们先把服务器端的事情处理完然后再回到Unity中。
首先是上传图片到高通的服务器供我们作为云识别的数据;
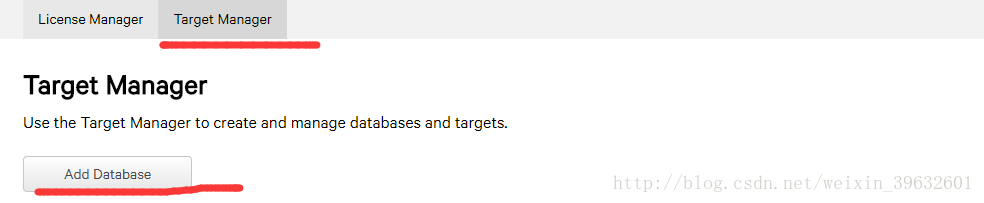
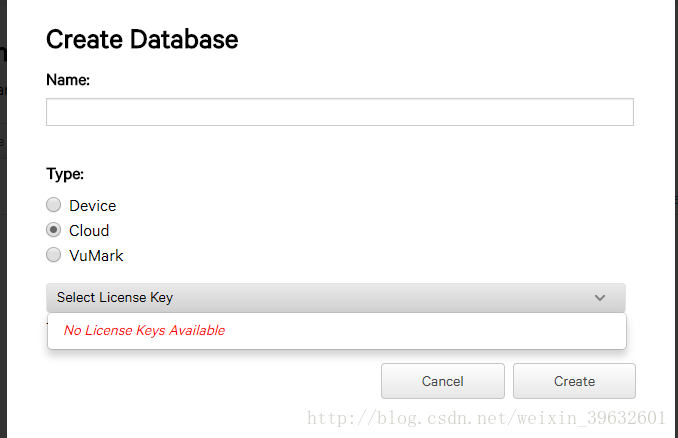
这里我做些说明主要是selectLicenseKey选项,每一个云识别库只能都会对应一个key反之也是。所以这里下来如果没有的话就新建一个就好了。
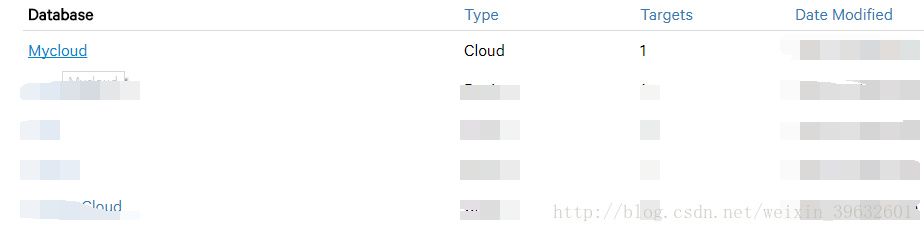
成功之后就能看到了,然后点进去添加你的识别图
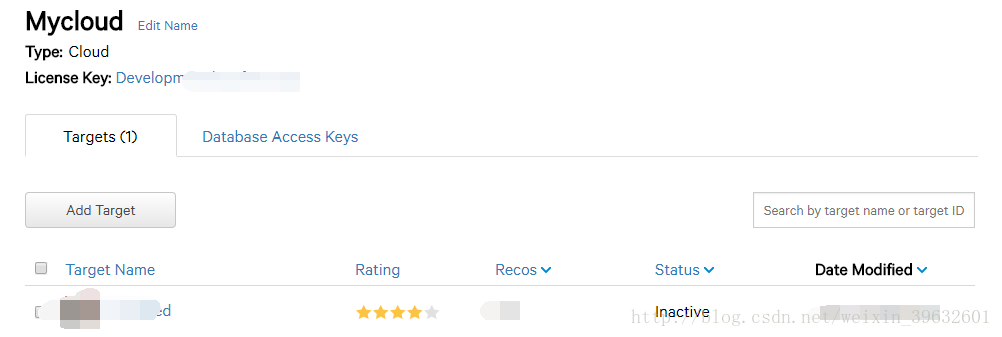
找到这一页
等在这里(哦,在这停顿)
接下来是Unity的操作
在导入或者添加AR插件之后将CloudRecognition预制体/组件添加入场景里
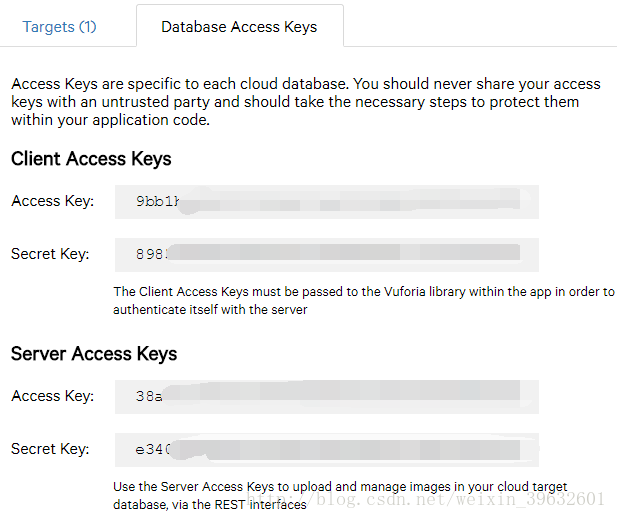
然后再CloudRecoBehaviour中填入上面的key注意别填反了。
完成之后丢一个ImageTarget在场景中
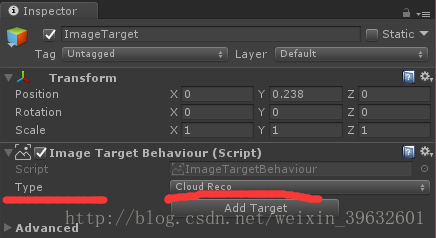
选为云识别
然后再ImageTarget下建一个子物体用来测试识别到了显示出来物体。
完成上述工作之后新建一个脚本,这里我使用的是官方案例的脚本名字SimpleCloudHandler将他和CloudRecoBehaviour组件放在一个物体上
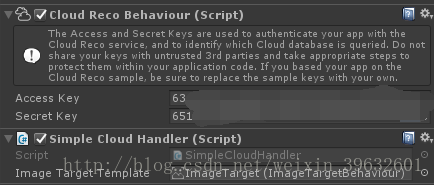
把ImageTarget拖到参数槽中
然后下面是脚本内容
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Vuforia;
public class SimpleCloudHandler : MonoBehaviour ,ICloudRecoEventHandler{
private CloudRecoBehaviour mCloudRecoBehaviour;
private bool mIsScanning = false;
private string mTargetMetadata = "";
public ImageTargetBehaviour ImageTargetTemplate;
// Use this for initialization
void Start () {
mCloudRecoBehaviour = GetComponent<CloudRecoBehaviour>();
if (mCloudRecoBehaviour)
{
mCloudRecoBehaviour.RegisterEventHandler(this);
}
}
/// <summary>
/// 初始化完成
/// </summary>
public void OnInitialized()
{
Debug.Log("Cloud Reco initialized");
}
/// <summary>
/// 初始化失败
/// </summary>
/// <param name="initError"></param>
public void OnInitError(TargetFinder.InitState initError)
{
Debug.Log("Cloud Reco init error " + initError.ToString());
}
/// <summary>
/// 刷新失败
/// </summary>
/// <param name="updateError"></param>
public void OnUpdateError(TargetFinder.UpdateState updateError)
{
Debug.Log("Cloud Reco update error " + updateError.ToString());
}
/// <summary>
/// 状态变更开始识别
/// </summary>
/// <param name="scanning"></param>
public void OnStateChanged(bool scanning)
{
mIsScanning = scanning;
if (scanning)
{
Debug.Log("true");
ObjectTracker tracker = TrackerManager.Instance.GetTracker<ObjectTracker>();
tracker.TargetFinder.ClearTrackables(false);
}
}
/// <summary>
/// 识别成功
/// </summary>
/// <param name="targetSearchResult"></param>
public void OnNewSearchResult(TargetFinder.TargetSearchResult targetSearchResult)
{
mTargetMetadata = targetSearchResult.MetaData;
Debug.Log(targetSearchResult.MetaData);
mCloudRecoBehaviour.CloudRecoEnabled = false;
// 加载识别后要显示物体
if (ImageTargetTemplate)
{
Debug.Log("找到");
ObjectTracker tracker = TrackerManager.Instance.GetTracker<ObjectTracker>();
ImageTargetBehaviour imageTargetBehaviour =
(ImageTargetBehaviour)tracker.TargetFinder.EnableTracking(
targetSearchResult, ImageTargetTemplate.gameObject);
}
}
void OnGUI()
{
// Display current 'scanning' status
GUI.Box(new Rect(100, 100, 200, 50), mIsScanning ? "Scanning" : "Not scanning");
// Display metadata of latest detected cloud-target
GUI.Box(new Rect(100, 200, 200, 50), "Metadata: " + mTargetMetadata);
// If not scanning, show button
// so that user can restart cloud scanning
if (!mIsScanning)
{
if (GUI.Button(new Rect(100, 300, 200, 50), "Restart Scanning"))
{
// Restart TargetFinder
mCloudRecoBehaviour.CloudRecoEnabled = true;
}
}
}
}
脚本中主要就是继承了ICloudRecoEventHandler接口实现接口中的方法来对应识别成功后的各种操作。OnGui中的方法不是必须的根据需要选择,这里说两个注意
1.mCloudRecoBehaviour.CloudRecoEnabled = false;开关识别功能,也就是相机依旧显示真是场景但是没有开启识别功能。
2. mCloudRecoBehaviour.RegisterEventHandler(this);这里必须注册保证唯一性。
然后,运行场景。














 2865
2865











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









