







参考链接:https://gym.openai.com/envs/ OpenAI gym官网
https://github.com/openai/gym#installation gym安装教程
http://blog.csdn.net/cs123951/article/details/77854453 MountainCar原理参考
OpenAI gym提供了强化学习时的环境模块,使得我们实现强化学习算法的时候无需关注于模拟环境的实现。
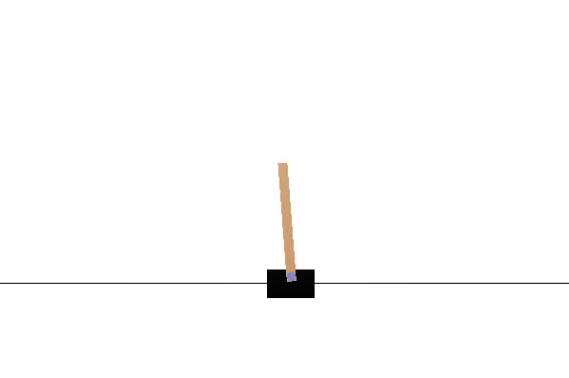
CartPole实例
运载体在一根杆子下无摩擦的跟踪。系统通过施加+1和-1推动运载体。杆子的摇摆在初始时垂直的,目标是阻止它掉落运载体。每一步杆子保持垂直可以获得+1的奖励。episode将会终结于杆子的摇摆幅度超过了离垂直方向的15°或者是运载体偏移初始中心超过2.4个单位。
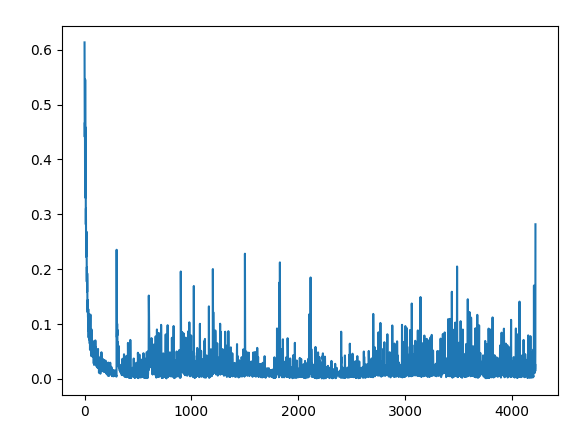
使用DQN代码测试CartPole:
import numpy as np
import random
import tensorflow as tf
import gym
max_episode = 100
env = gym.make('CartPole-v0')
env = env.unwrapped
class DeepQNetwork(object):
def __init__(self,
n_actions,
n_features,
learning_rate=0.01,
reward_decay=0.9, # gamma
epsilon_greedy=0.9, # epsilon
epsilon_increment = 0.001,
replace_target_iter=300, # 更新target网络的间隔步数
buffer_size=500, # 样本缓冲区
batch_size=32,
):
self.n_actions = n_actions
self.n_features = n_features
self.lr = learning_rate
self.gamma = reward_decay
self.epsilon_max = epsilon_greedy
self.replace_target_iter = replace_target_iter
self.buffer_size = buffer_size
self.buffer_counter = 0 # 统计目前进入过buffer的数量
self.batch_size = batch_size
self.epsilon = 0 if epsilon_increment is not None else epsilon_greedy
self.epsilon_max = epsilon_greedy
self.epsilon_increment = epsilon_increment
self.learn_step_counter = 0 # 学习计步器
self.buffer = np.zeros((self.buffer_size, n_features * 2 + 2)) # 初始化Experience buffer[s,a,r,s_]
self.build_net()
# 将eval网络中参数全部更新到target网络
target_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='target_net')
eval_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='eval_net')
with tf.variable_scope('soft_replacement'):
self.target_replace_op = [tf.assign(t, e) for t, e in zip(target_params, eval_params)]
self.sess = tf.Session()
tf.summary.FileWriter('logs/', self.sess.graph)
self.sess.run(tf.global_variables_initializer())
def build_net(self):
self.s = tf.placeholder(tf.float32, [None, self.n_features])
self.s_ = tf.placeholder(tf.float32, [None, self.n_features])
self.r = tf.placeholder(tf.float32, [None, ])
self.a = tf.placeholder(tf.int32, [None, ])
w_initializer = tf.random_normal_initializer(0., 0.3)
b_initializer = tf.constant_initializer(0.1)
# q_eval网络架构,输入状态属性,输出4种动作
with tf.variable_scope('eval_net'):
eval_layer = tf.layers.dense(self.s, 20, tf.nn.relu, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='eval_layer')
self.q_eval = tf.layers.dense(eval_layer, self.n_actions, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='output_layer1')
with tf.variable_scope('target_net'):
target_layer = tf.layers.dense(self.s_, 20, tf.nn.relu, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='target_layer')
self.q_next = tf.layers.dense(target_layer, self.n_actions, kernel_initializer=w_initializer,
bias_initializer=b_initializer, name='output_layer2')
with tf.variable_scope('q_target'):
# 计算期望价值,并使用stop_gradient函数将其不计算梯度,也就是当做常数对待
self.q_target = tf.stop_gradient(self.r + self.gamma * tf.reduce_max(self.q_next, axis=1))
with tf.variable_scope('q_eval'):
# 将a的值对应起来,
a_indices = tf.stack([tf.range(tf.shape(self.a)[0]), self.a], axis=1)
self.q_eval_a = tf.gather_nd(params=self.q_eval, indices=a_indices)
with tf.variable_scope('loss'):
self.loss = tf.reduce_mean(tf.squared_difference(self.q_target, self.q_eval_a))
with tf.variable_scope('train'):
self.train_op = tf.train.RMSPropOptimizer(self.lr).minimize(self.loss)
# 存储训练数据
def store_transition(self, s, a, r, s_):
transition = np.hstack((s, a, r, s_))
index = self.buffer_counter % self.buffer_size
self.buffer[index, :] = transition
self.buffer_counter += 1
def choose_action_by_epsilon_greedy(self, status):
status = status[np.newaxis, :]
if random.random() < self.epsilon:
actions_value = self.sess.run(self.q_eval, feed_dict={self.s: status})
action = np.argmax(actions_value)
else:
action = np.random.randint(0, self.n_actions)
return action
def learn(self):
# 每学习self.replace_target_iter步,更新target网络的参数
if self.learn_step_counter % self.replace_target_iter == 0:
self.sess.run(self.target_replace_op)
# 从Experience buffer中选择样本
sample_index = np.random.choice(min(self.buffer_counter, self.buffer_size), size=self.batch_size)
batch_buffer = self.buffer[sample_index, :]
_, cost = self.sess.run([self.train_op, self.loss], feed_dict={
self.s: batch_buffer[:, :self.n_features],
self.a: batch_buffer[:, self.n_features],
self.r: batch_buffer[:, self.n_features + 1],
self.s_: batch_buffer[:, -self.n_features:]
})
self.epsilon = min(self.epsilon_max, self.epsilon + self.epsilon_increment)
self.learn_step_counter += 1
return cost
RL = DeepQNetwork(n_actions=env.action_space.n,
n_features=env.observation_space.shape[0])
total_step = 0
for episode in range(max_episode):
observation = env.reset()
episode_reward = 0
while True:
env.render() # 表达环境
action = RL.choose_action_by_epsilon_greedy(observation)
observation_, reward, done, info = env.step(action)
# x是车的水平位移,theta是杆离垂直的角度
x, x_dot, theta, theta_dot = observation_
# reward1是车越偏离中心越少
reward1 = (env.x_threshold - abs(x))/env.x_threshold - 0.8
# reward2为杆越垂直越高
reward2 = (env.theta_threshold_radians - abs(theta))/env.theta_threshold_radians - 0.5
reward = reward1 + reward2
RL.store_transition(observation, action, reward, observation_)
if total_step > 100:
cost = RL.learn()
print('cost: %.3f' % cost)
episode_reward += reward
observation = observation_
if done:
print('episode:', episode,
'episode_reward %.2f' % episode_reward,
'epsilon %.2f' % RL.epsilon)
break
total_step += 1
MountainCar实例
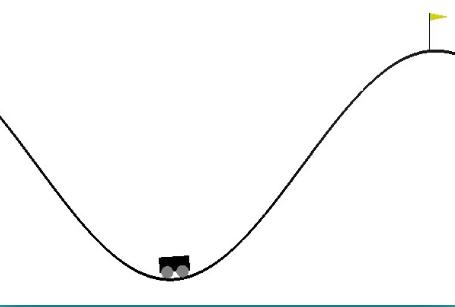
car的轨迹是一维的,定位在两山之间,目标是爬上右边的山顶。可是car的发动机不足以一次性攀登到山顶,唯一的方式是car来回摆动增加动量。
有3个动作:向前、不动和向后。状态有2个:位置position和速度velocity。position的值在最低点处为-0.5左右,左边的坡顶为-1.2,右边与之相对应的高度位置为0,小黄旗位置为0.5。reward的值只有-1,步数越少到达终点,reward越大。
自定义reward:高度越高,reward越大,因为左边高度高了,可以积攒的动量越大。所以可设为reward=abs(position+0.5)
RL = DeepQNetwork(n_actions=env.action_space.n,
n_features=env.observation_space.shape[0])
total_step = 0
for episode in range(max_episode):
observation = env.reset()
episode_reward = 0
while True:
env.render() # 表达环境
action = RL.choose_action_by_epsilon_greedy(observation)
observation_, reward, done, info = env.step(action)
#
position, velocity = observation_
reward=abs(position+0.5)
RL.store_transition(observation, action, reward, observation_)
if total_step > 100:
cost_ = RL.learn()
cost.append(cost_)
episode_reward += reward
observation = observation_
if done:
print('episode:', episode,
'episode_reward %.2f' % episode_reward,
'epsilon %.2f' % RL.epsilon)
break
total_step += 1
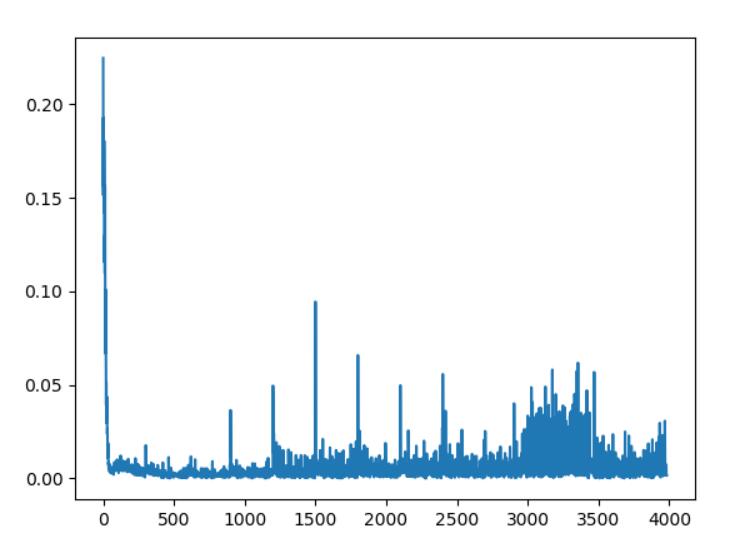
plt.plot(np.arange(len(cost)), cost)
plt.show()














 428
428











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









