







图及其操作(C语言版)
标签(空格分隔): 未分类
图的定义和性质:
定义: 图是由顶点的有穷非空集合和顶点之间边的集合组成,通常表示为:G(V,R),其中,G表示一个图,V是图G中顶点的集合,R是图G中边的集合。
顶点:在图中的数据元素通常叫做顶点。
弧头/弧尾:若<v,w>∈VR则<v,w>表示从v到
w 的一条弧,且称v为弧尾或初始点,称w 为弧头或终端点。有向图:若图中的边是有向的,即<v,w>∈VR≠<w,v>∈VR此时的图称为有向图。
无向图:若<v,w>∈VR 必有 <w,v>∈VR,即VR是对称的,则以无序对(v,w)代替两个有序对,表示v,w之间的一条边,此时的图称为无向图。
完全图:若用n表示图中的顶点数,用e表示图中弧或者边的数目,在下边的讨论中,我们不考虑顶点到其自身的边或者弧。
- 对于无向图来说:0≤e≤12n(n−1),有12n(n−1)条边的无向图称为完全图
- 对于有向图来说:0≤e≤n(n−1),有n(n−1)条弧的有向图称为有向安完全图。
稀疏图/稠密图:有很多条边或者弧的图称为稠密图,反之称为稀疏图例如:(e<nlogn)
权:有时边或者弧有和他相关的数,这种与图的边或者弧相关的数叫做权。这些权可以表示一个顶点到另一个顶点的距离或者消耗。
网:带权的图称为网。
子图:假设有两个图G={V,{R}}和G‘={V‘,{R‘}},如果V‘⊆V且R‘⊆R,则称G‘为G的子图
邻接点:
- 对于无向图:
G={V,{R}} ,如果边(v,v‘)∈R,则称顶点v 和互为邻接点v‘ ,边(v,v‘)依附于顶点v和v‘ 。或者说边(v,v‘)和顶点v和v‘ 相关联。 - 对于有向图:G={V,{A}},如果弧<v,v1>∈A,则称顶点v邻接到顶点
v‘ ,顶点v‘邻接到顶点v,弧<v,v‘> 和顶点v,v‘ 相关联。 无向图顶点的度:在无向图中,顶点v的度是和顶点v相关联的边的数目,记做TD(v)
有向图顶点的度:
- 入度:在有向图中,顶点v的入度是指以顶点v为头的弧的数目
- 出度:在有向图中,顶点v的出度是指以顶点v为尾的弧的数目
顶点,边(弧),度之间的关系:一般的,如果顶点vi的度记为TD(vi),那么一个有n个顶点,
e 条边或者弧的图,满足如下关系:e=12∑i=1nTD(vi)图的路径:无向图G={V,{E}}中从顶点V到顶点
V‘ 的路径是一个顶点序列(v=vi,0,vi,1,...,vi,m=v‘)其中(vi,j−1,vi,j)∈E,1≤j≤m。如果G是有向图,则路径也是有向的。路径的长度:路径上边或者弧的数目
回路/环第一个顶点和最后一个顶点相同的路径称为回路或者环。除了第一个和最后一个顶点之外,其余顶点不重复出现的回路,称为简单回路或者简单环。
连通图:在无向图G中,如果从顶点v到顶点
v‘ 有路径,则称v和v‘ 是连通的。若对于图中任意两个顶点vi、vj∈V,vi和vj都连通,则称G是连通图。连通分量:无向图中的极大连通子图称为是该图的连通分量。
强连通图:在有向图G中,如果对于每一对vi,vj∈V,vi≠vj ,从对vi到vj和从vj到vi都存在路径,则称G是强连通图。
强连通分量:有向图中的极大连通子图称作有向图的强连通分量。
连通图的生成树:一个连通图的生成树是一个极小连通子图,他含有图中的全部顶点,但是只含有构成一颗树的n−1条边。
性质:
- 一颗有n个顶点的生成树有且只有n-1条边
- 如果一个图有n个顶点和小于n-1条边,则是非连通图。若多于n-1条边,则一定有环。
- 如果一个有向图恰有一个顶点的入度为0,其余顶点的入度均为1,则是一颗有向树。
- 对于无向图:
图的存储结构:
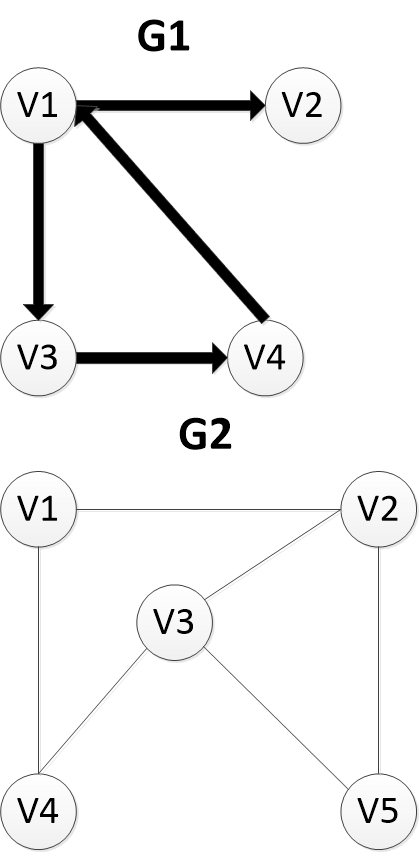
以这两个图为例:
1.数组表示法:
用两个数组分别存储数据元素(顶点)的信息和数据之间的关系(边或弧)的信息。
/**数组表示法(邻接矩阵)**/
#define INFINITY INT_MAX//整数类型最大值
#define MAX_VERTEX_NUM 20//最大顶点个数
typedef enum{ DG,DN,uDG,UDN} GraphKind;//{有向图,有向网,无向图,无向网}
typedef struct ArcCell{
VRType adj;//弧或者边的类型:对于无权图,用0或者1表示是否相邻
//对带权图,则为权值类型
InfoType *inform;//改弧相关的信息指针
}ArcCell, AdjMatrix[MAX_VERTEX_NUM][MAX_VERTEX_NUM];
typedef struct {
VertexType vexs[MAX_VERTEX_NUM];//顶点向量
AdjMatrix arcs;//邻接矩阵
int vexNum,arcNum;//图的当前顶点数量,边或者弧数量
GraphKind kind;//图类型
}MGraph;上边两种图的邻接矩阵表示法的示例:
2.邻接表:
邻接表是图的一种链式存储结构。在邻接表中,对图中的每个顶点建立一个单链表,第i个单链表中的结点表示依附于顶点
/**邻接表表示法**/
#define INFINITY INT_MAX//整数类型最大值
typedef struct ArcNode{//弧结点
int adjvex;//改弧所指向的位置
struct ArcNode *nextArc;//下一条弧指针
InfoType *info;//该弧相关信息的指针
}
typedef struct VNode{//表头结点
VertexType data;//顶点信息
ArcNode *firstArc;//依附该节点的第一条弧结点
}VNode,AdjList[MAX_VERTEX_NUM];
typedef struct {//邻接表
AdjList vertices;//图的顶点数组
int verNum,arcNum;//弧的当前顶点数和弧数
int kind;//图类型
}ALGraph;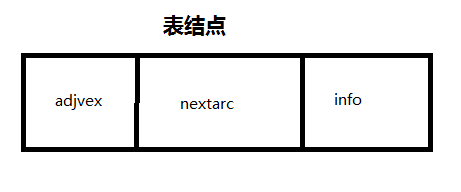

上边两种图的邻接表表示法的示例:
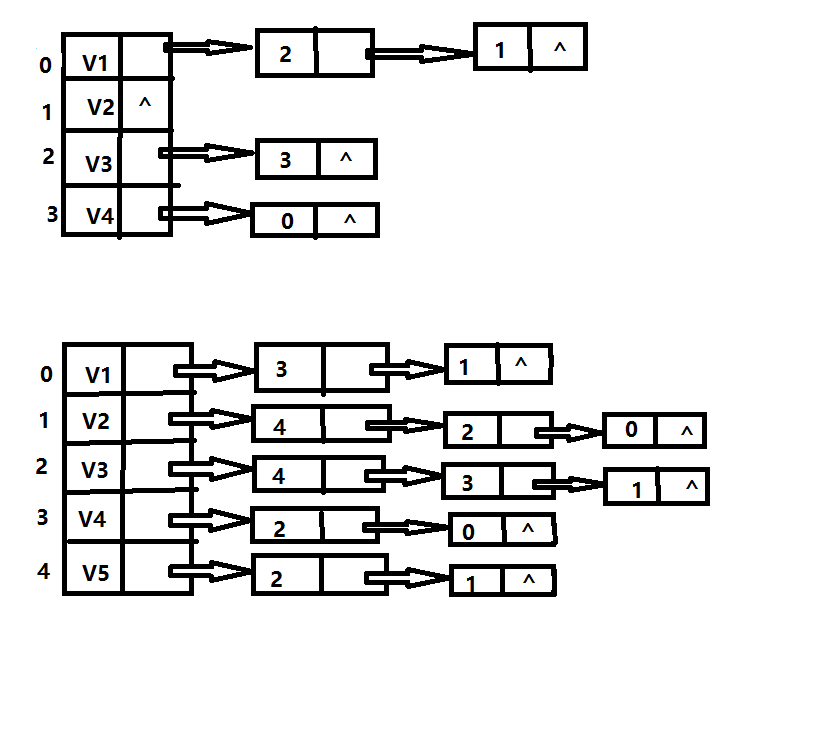
上边的两种存储结构对于无向图和有向图均可适用,而另外的两种存储结构则有所偏向。
3.邻接多重表(无向图):
在邻接多重表中,每一条边用一个结点表示,而一个节点由如下所示的六个与组成:
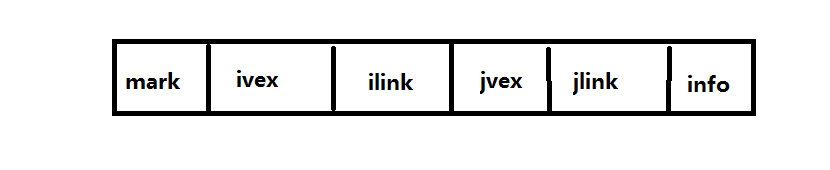
其中mark域为标志域用于标记该边是否被搜索过;ivex和jvex为依附于该边的两个节点在图中的位置;ilink指向于下一条依附于结点ivex的边;jlink指向于下一条依附于结点jvex的边;info为指向该边的信息的指针域。
4.十字链表(有向图):
在十字链表中,对应于有向图的每一条弧有一个结点,对应每一个顶点也有一个结点。
弧结点:
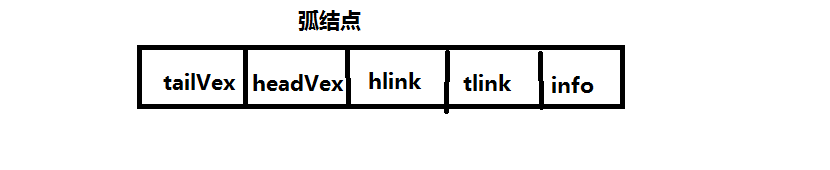
其中tailVex和headVex分别指向弧头和弧尾这两个结点在图中的位置;链域hlink指向弧头相同的下一条弧;tlink指向弧尾相同的下一条弧;info指向该弧的相关信息
顶点结点:
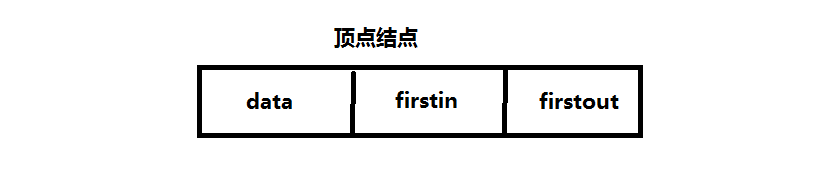
其中data域存储和顶点相关的信息;firstin指向第一个以该顶点为弧头的弧结点;firstout指向第一个以该结点为弧尾的弧结点。
图的遍历:
图的遍历分为两种:深度优先(DFS)和广度优先(BFS)
深度优先遍历:
- 初始状态是图中的所有顶点都未被访问,则随机选取图中的某一顶点v出发,访问该结点;
- 然后依次从
v 未被访问的邻接点出发深度优先遍历图(递归),直至图中所有和v有路径相通的顶点都被访问到; - 若此时图中仍有未被访问到的结点,则另选一个未被访问到的结点做起点,重复上述步骤,直到图中所有结点都被访问到。
广度优先遍历 :
- 初始状态是图中的所有顶点都未被访问,则随机选取图中的某一顶点
v 出发,访问该结点; - 在访问过v之后一次访问
v 的各个未被访问的过的邻接点; - 然后从这些邻接点出发依次访问他们的邻接点,并且保证”先被访问的顶点的邻接点先于”后被访问的顶点的邻接点”被访问,直至所有已被访问的顶点的邻接点都被访问。
- 若此时图中国仍有顶点未被访问到,则随机选取未被访问的顶点作为起始点,重复上述步骤,直到图中所有的结点都被访问到。
- 初始状态是图中的所有顶点都未被访问,则随机选取图中的某一顶点
例如:
对于图G(无向图)来说:
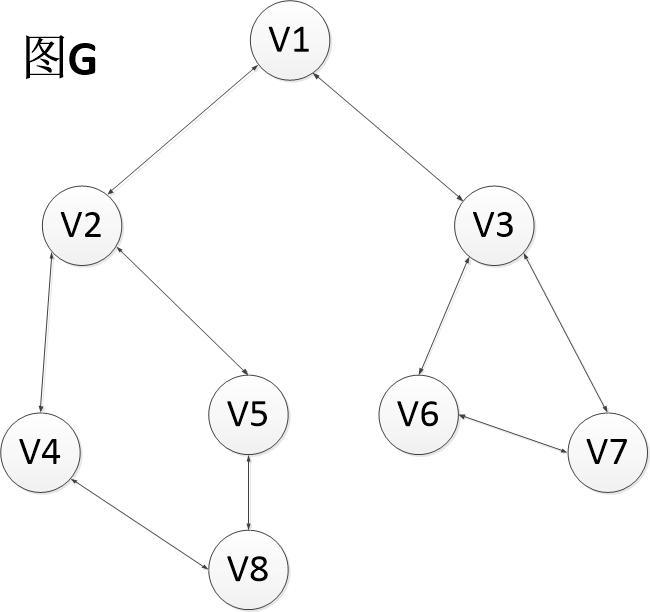
其中一种深度优先遍历序列是:V1,V2,V4,V8,V5,V3,V6,V7
其中一种广度优先遍历序列是:V1,V2,V3,V4,V5,V6,V7,V8
注意:因为起始点的不同,所以一个图可能有多种的深度优先和广度优先的遍历序列
图的连通性:
无向图的连通分量和生成树:
- 对于连通图:他的生成树即是他的极小连通子图,只要按照深度优先或者是广度优先的策略进行遍历,即可得到连通图的广度优先生成树或者是深度哟徐爱你生成树。
- 对于非连通图:他的每个连通分量中的顶点集,和深度优先遍历(或者是广度优先)时走过的边一起构成若干颗生成树,这些连通分量的生成树组成非连通图的生成森林。
有向图的强连通分量:
- 在有向图G上,从某个顶点出发沿以该顶点为尾的弧进行深度优先遍历,并按照其所有邻接点的搜索都完成(即退出DFS函数)的顺序将顶点排列起来。
- 在有向图G上,从最后完成搜索的顶点出发,沿着以该顶点为头的弧作逆向的深度优先遍历,若此次遍历不能访问到有向图中的所有顶点,则从余下的顶点中最后完成搜索的那个顶点出发,继续做逆向的深度优先遍历,以此类推,直到有向图中所有的顶点都被访问到为止。
- 此时得到的多个顶点集就是该有向图的多个强连通分量的顶点集。
最小生成树:
构造连通网的最小代价生成树的问题就是图的最小生成树问题。一颗生成树的代价就是树上各边的代价之和。
原理:
构造最小生成树大多都是用了最小生成树的如下性质(MTS):
假设N=(V,{E})是一个连通网,U是一个顶点集
V 的一个非空子集。若(u,v)是一条具有最小权值的边,其中u∈U,v∈V−U,则必存在一颗包含边(u,v)的最小生成树。
常见算法:
Prim(普里姆)算法:
假设N=(V,{E})是连通网,TE是N上的最小生成树中边的集合。算法从U={u0}(u0∈V),TE={} 重复执行以下操作:在所有u∈U,v∈V−U的边(u,v)∈E中找出代价最小的一条边(u0,v0)并入集合TE,同时将v0并入U,直至U=V 为止。此时TE中必有n−1条边,则T=(V,{TE})为N的最小生成树。Kruskal(克鲁斯卡尔)算法:假设N=(V,{E})是连通网,则令最小生成树的初始状态为只有n个顶点而无边的非连通图
T=(V,{}) ,图中每个顶点自成一个连通分量。在E中选择代价最小的边,若该边依附的顶点落在T 中不同的连通分量上,则将此边加入到T中去,否则舍弃此边而寻找下一条代价最小的边。依次类推,直到T 中所有顶点都在同一个连通分量上为止。
有向无环图的应用:
有向无环图: 一个无环的有向图称为有向无环图(directed acycline graph),简称DAG图。
偏序关系:若集合X上的关系
全序关系:若R是集合
拓扑排序:由某个集合上的一个偏序得到该集合上的一个铨叙,这个操作叫做拓扑排序。
AOV-网:用顶点表示事件,用弧表示活动间的优先关系的有向图简称为顶点表示活动的网(Activity On Vertex Network)。
前驱/后继/直接前驱/直接后继在AOV-网中,若从顶点i到顶点
AOE-网:与AOV-网相对应的是AOE-网,其中顶点表示事件,弧表示活动,权表示完成活动所需要时间。
拓扑排序算法:
- 在有向图中选择一个没有前驱的顶点直接输出
- 从图中删除该节点和所有以他为尾的弧
- 重复上述两个步骤,直到全部顶点已输出,或者当前图中不存在无前驱的结点为止。
- 若是全部顶点已输出,则完成拓扑排序
- 若是当前图中不存在无前驱的顶点,则说明有向图中存在环。
最短路径:
从某个顶点到其余各顶点的最短路径:
给定有向带权图G和原点v,求从原点
Dijkstra(迪杰斯特拉)算法(时间复杂度n2):
首先引进一个辅助向量D,他的每个分量
D[i] 表示当前所找到的从始点v到每个终点vi 的最短路径的长度。他的初态为:若从v到vi有弧,则D[i]为弧上的权值,否则置D[i]为∞。
S表示已找到从v出发的最短路径的终点的集合,初始状态为空集。
arc[i][j] 表示顶点vi到顶点vj的弧的权值。选择vj,使得D[j]=Min{D[i]|vi∈V−S}的路径就是从v出发的最短的一条路径,记为
(v,vj) 若D[j]+arc[i][j]<D[i],则修改D[i]=D[j]+arc[i][j]
重复操作上述两步n−1次,即可得到从顶点v到其余各顶点的最短路径。
从某个顶点到其余各顶点的最短路径:
给定有向带权图G,求出每一对顶点之间的最短路径
Dijkstra(迪杰斯特拉)算法(时间复杂度n3 ):
每次以一个顶点为原点,重复循环n次Dijkstra算法即可求出每对顶点间的最短路径。
Floyd(弗洛伊德)算法(时间复杂度n3):
假设求从顶点vi到顶点vj的最短路径。
如果从顶点vi到顶点vj存在一条长度为arc[i][j]的路径,该路径不一定为最短路径。
首先考虑路径(vi,v0,vj)是否存在(即判别弧(vi,v0)和(v0,vj)是否存在)。若存在,则比较(vi,vj)和(vi,v0,vj)的路径长度,选取路径长度小的的路径,作为从vi到vj中间顶点下标序号不大于0的最短路径。
如果在路径上再增加一个点v1,也就是说,如果(vi,...v1)和(v1,...vj)分别是当前找到的中间顶点下标序号不大于0的最短路径,那么(vi,...,v1,...vj)就有可能是从vi到vj的中间顶点下标序号不大于1的最短路径。
将前两步找到的从vi到vj中间顶点下标序号不大于1的最短路径和从 vi到vj中间顶点下标序号不大于0的最短路径进行比较,从中选出vi到vj中间顶点下标序号不大于1的最短路径。
再增加一个顶点v2进行试探,以此类推,经过n次之后得到的必是从vi到vj的最短路径。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









