







Rcnn论文总结
论文:《Rich featurehierarchies for accurate object detection and semantic segmentation》
这里我也是借鉴了前辈的博客:http://blog.csdn.net/hjimce/article/details/50187029,在此基础上我详细介绍了selective research原理。
概述
此篇论文是2014年CVPR上的经典论文,这篇文章的算法思想又被称之为:R-CNN(Regions with Convolutional NeuralNetwork Features),是物体检测领域曾经获得state-of-art精度的经典文献。
基本知识介绍
2.1 有监督预训练与无监督预训练
(1)无监督预训练(Unsupervised pre-training)
无监督预训练这个名词我们比较熟悉,栈式自编码、DBM采用的都是采用无监督预训练。因为预训练阶段的样本不需要人工标注数据,所以就叫做无监督预训练。
(2)有监督预训练(Supervised pre-training)
所谓的有监督预训练,我们也可以把它称之为迁移学习。比如你已经有一大堆标注好的人脸年龄分类的图片数据,训练了一个CNN,用于人脸的年龄识别。然后当你遇到新的项目任务是:人脸性别识别,那么这个时候你可以利用已经训练好的年龄识别CNN模型,去掉最后一层,然后其它的网络层参数就直接复制过来,继续进行训练。这就是所谓的迁移学习,说的简单一点就是把一个任务训练好的参数,拿到另外一个任务,作为神经网络的初始参数值,这样相比于你直接采用随机初始化的方法,精度可以有很大的提高。
图片分类标注好的训练数据非常多,但是物体检测的标注数据却很少,如何用少量的标注数据,训练高质量的模型,这就是文献最大的特点,这篇paper采用了迁移学习的思想。文献就先用了ILSVRC2012这个训练数据库(这是一个图片分类训练数据库),先进行网络的图片分类训练。这个数据库有大量的标注数据,共包含了1000种类别物体,因此预训练阶段cnn模型的输出是1000个神经元,或者我们也直接可以采用Alexnet训练好的模型参数。
2.2 selective search
选择性搜索(Selective Search)综合了蛮力搜索(ExhausticveSearch)和分割(Segmentation)的方法,意在找到可能的目标位置进行物体的识别。应用在高分辨率遥感图像中的物体检测中,能够大幅度降低搜索空间,提高程序效率。
算法原理:
SelectiveSearch算法分为两个步骤:
1) 采用FelezenSegmentation算法对输入图像进行初始分割,得到一些初始化的小区域。
2) 采用多种相似性计算的策略组合,对初始化的小区域进行合并。
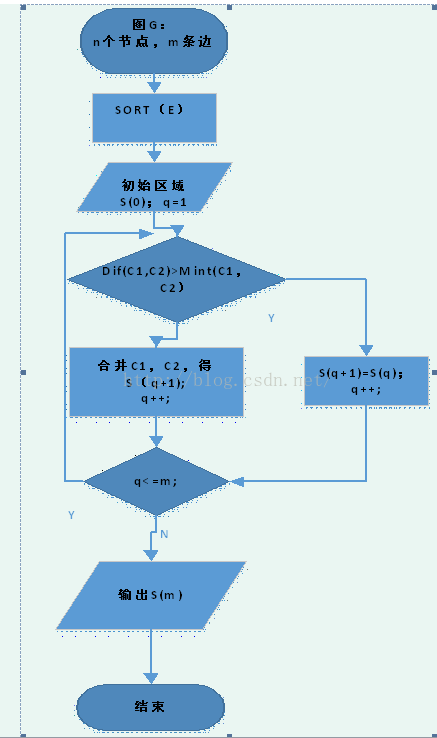
1) Felezen Segmentation获得初始小区域
基本思想:以图表示图像,图像中的每个像素表示图上的一个节点,每一条连接节点的无向边都具有一个权重(weights),以衡量其连接的两个节点之间的不相似度(dissimilarity)。
初始条件:各节点(像素点)表示初始区域
执行过程:基于两个特征来判断两个区域是否应该合并:区域间间距和区域内间距。
基本思路是,如果两个区域的区域间间距明显大于任意一个区域的区域内间距,那么就认为这两个区域之间存在明显的界限——即不能合并两个区域。
注:
Ø 区域间间距:Dif(C1,C2)定义为所有分属于两个区域且有边连接的点对中,权重最小的那对边的权值。
Ø 区域内间距:Int(C)定义为区域对应最小生成树中权重最大的边的权重值。
FelezenSegmentation流程图:
2) 多种策略合并:
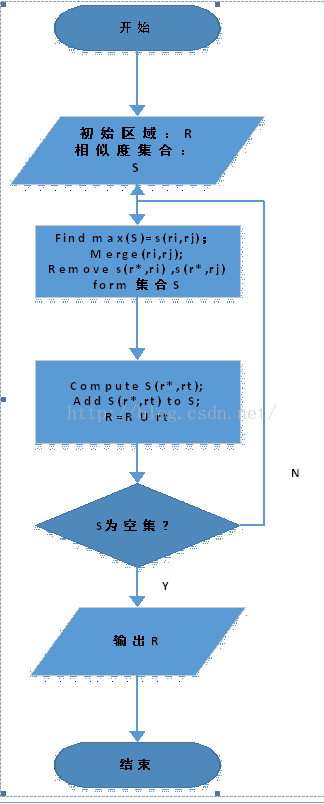
算法详述:
初始条件:初始区域;计算各相邻区域的相似性
过程:
Ø 找到相似性最大的区域max(S)={ri,rj)
Ø 合并rt=riUrj
Ø 从S集合中移走所有与ri,rj相关项
Ø 计算rt与其相邻区域的相似性s(rt,r*)
Ø R=RUrt
Ø 重复1~5,直到S集合为空
优势:
计算中,可以采取多种相似度计算方法,如:S(color,texture,fill)以及不同策略之间的组合,即:

2.3 IOU的定义
因为没有搞过物体检测不懂IOU这个概念,所以就简单介绍一下。物体检测需要定位出物体的boundingbox,就像下面的图片一样,我们不仅要定位出车辆的bounding box 我们还要识别出bounding box 里面的物体就是车辆。对于boundingbox的定位精度,有一个很重要的概念,因为我们算法不可能百分百跟人工标注的数据完全匹配,因此就存在一个定位精度评价公式:IOU

IOU定义了两个bounding box的重叠度,如下图所示:
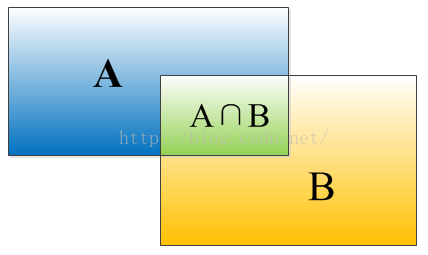
矩形框A、B的一个重合度IOU计算公式为:
IOU=(A∩B)/(A∪B)
就是矩形框A、B的重叠面积占A、B并集的面积比例:
IOU=SI/(SA+SB-SI)
2.4 non-maxmum suppression
因为一会儿讲RCNN算法,会从一张图片中找出n多个可能是物体的矩形框,然后为每个矩形框为做类别分类概率:

就像上面的图片一样,定位一个车辆,最后算法就找出了一堆的方框,我们需要判别哪些矩形框是没用的。非极大值抑制:先假设有6个矩形框,根据分类器类别分类概率做排序,从小到大分别属于车辆的概率分别为A、B、C、D、E、F。
(1)从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
(2)假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
(3)从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
就这样一直重复,找到所有被保留下来的矩形框。
算法总体思路
开始讲解paper前,我们需要先把握总体思路,才容易理解paper的算法。
图片分类与物体检测不同,物体检测需要定位出物体的位置,这种就相当于回归问题,求解一个包含物体的方框。而图片分类其实是逻辑回归。这种方法对于单物体检测还不错,但是对于多物体检测就……。
因此paper采用的方法是:首先输入一张图片,我们先定位出2000个物体候选框,然后采用CNN提取每个候选框中图片的特征向量,特征向量的维度为4096维,接着采用svm算法对各个候选框中的物体进行分类识别。也就是总个过程分为三个程序:
a、找出候选框;
b、利用CNN提取特征向量;
c、利用SVM进行特征向量分类;
具体的流程如下图片所示:
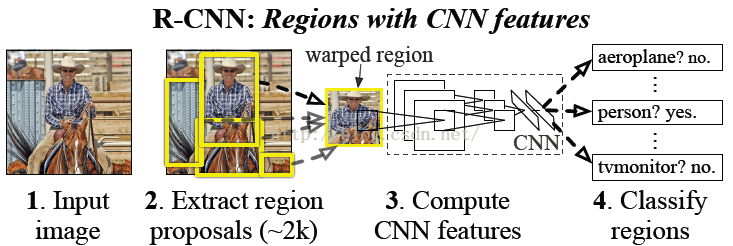
后面我们将根据这三个过程,进行每个步骤的详细讲解。
候选框搜索阶段
1、实现方式
当我们输入一张图片时,我们要搜索出所有可能是物体的区域,这个采用的方法是传统文献的算法:《selective search for object recognition》,通过这个算法我们搜索出2000个候选框。然后从上面的总流程图中可以看到,搜出的候选框是矩形的,而且是大小各不相同。然而CNN对输入图片的大小是有固定的,如果把搜索到的矩形选框不做处理,就扔进CNN中,肯定不行。因此对于每个输入的候选框都需要缩放到固定的大小。下面我们讲解要怎么进行缩放处理,为了简单起见我们假设下一阶段CNN所需要的输入图片大小是个正方形图片227*227。因为我们经过selective search 得到的是矩形框,paper试验了两种不同的处理方法:
(1)各向异性缩放
这种方法很简单,就是不管图片的长宽比例,管它是否扭曲,进行缩放就是了,全部缩放到CNN输入的大小227*227,如下图(D)所示;
(2)各向同性缩放
因为图片扭曲后,估计会对后续CNN的训练精度有影响,于是作者也测试了“各向同性缩放”方案。这个有两种办法。
Ø 直接在原始图片中,把bounding box的边界进行扩展延伸成正方形,然后再进行裁剪;如果已经延伸到了原始图片的外边界,那么就用bounding box中的颜色均值填充;如下图(B)所示;
Ø 先把bounding box图片裁剪出来,然后用固定的背景颜色填充成正方形图片(背景颜色也是采用bounding box的像素颜色均值),如下图(C)所示;

对于上面的异性、同性缩放,文献还有个padding处理,上面的示意图中第1、3行就是结合了padding=0,第2、4行结果图采用padding=16的结果。经过最后的试验,作者发现采用各向异性缩放、padding=16的精度最高,具体不再啰嗦。
OK,上面处理完后,可以得到指定大小的图片,因为我们后面还要继续用这2000个候选框图片,继续训练CNN、SVM。然而人工标注的数据一张图片中就只标注了正确的bounding box,我们搜索出来的2000个矩形框也不可能会出现一个与人工标注完全匹配的候选框。因此我们需要用IOU为2000个bounding box打标签,以便下一步CNN训练使用。在CNN阶段,如果用selective search挑选出来的候选框与物体的人工标注矩形框的重叠区域IoU大于0.5,那么我们就把这个候选框标注成物体类别,否则我们就把它当做背景类别。SVM阶段的正负样本标签问题,等到了svm讲解阶段我再具体讲解。
CNN特征提取阶段
1、算法实现
a、网络结构设计阶段
网络架构我们有两个可选方案:第一选择经典的Alexnet;第二选择VGG16。经过测试Alexnet精度为58.5%,VGG16精度为66%。VGG这个模型的特点是选择比较小的卷积核、选择较小的跨步,这个网络的精度高,不过计算量是Alexnet的7倍。后面为了简单起见,我们就直接选用Alexnet,并进行讲解;Alexnet特征提取部分包含了5个卷积层、2个全连接层,在Alexnet中p5层神经元个数为9216、 f6、f7的神经元个数都是4096,通过这个网络训练完毕后,最后提取特征每个输入候选框图片都能得到一个4096维的特征向量。
b、网络有监督预训练阶段
参数初始化部分:物体检测的一个难点在于,物体标签训练数据少,如果要直接采用随机初始化CNN参数的方法,那么目前的训练数据量是远远不够的。这种情况下,最好的是采用某些方法,把参数初始化了,然后在进行有监督的参数微调,这边文献采用的是有监督的预训练。所以paper在设计网络结构的时候,是直接用Alexnet的网络,然后连参数也是直接采用它的参数,作为初始的参数值,然后再fine-tuning训练。
网络优化求解:采用随机梯度下降法,学习速率大小为0.001;
c、fine-tuning阶段
我们接着采用selective search 搜索出来的候选框,然后处理到指定大小图片,继续对上面预训练的cnn模型进行fine-tuning训练。假设要检测的物体类别有N类,那么我们就需要把上面预训练阶段的CNN模型的最后一层给替换掉,替换成N+1个输出的神经元(加1,表示还有一个背景),然后这一层直接采用参数随机初始化的方法,其它网络层的参数不变;接着就可以开始继续SGD训练了。开始的时候,SGD学习率选择0.001,在每次训练的时候,我们batch size大小选择128,其中32个事正样本、96个事负样本(正负样本的定义前面已经提过,不再解释)。
2、问题解答
OK,看完上面的CNN过程后,我们会有一些细节方面的疑问。首先,反正CNN都是用于提取特征,那么我直接用Alexnet做特征提取,省去fine-tuning阶段可以吗?这个是可以的,你可以不需重新训练CNN,直接采用Alexnet模型,提取出p5、或者f6、f7的特征,作为特征向量,然后进行训练svm,只不过这样精度会比较低。那么问题又来了,没有fine-tuning的时候,要选择哪一层的特征作为cnn提取到的特征呢?我们有可以选择p5、f6、f7,这三层的神经元个数分别是9216、4096、4096。从p5到p6这层的参数个数是:4096*9216 ,从f6到f7的参数是4096*4096。那么具体是选择p5、还是f6,又或者是f7呢?
文献paper给我们证明了一个理论,如果你不进行fine-tuning,也就是你直接把Alexnet模型当做万金油使用,类似于HOG、SIFT一样做特征提取,不针对特定的任务。然后把提取的特征用于分类,结果发现p5的精度竟然跟f6、f7差不多,而且f6提取到的特征还比f7的精度略高;如果你进行fine-tuning了,那么f7、f6的提取到的特征最会训练的svm分类器的精度就会飙涨。
据此我们明白了一个道理,如果不针对特定任务进行fine-tuning,而是把CNN当做特征提取器,卷积层所学到的特征其实就是基础的共享特征提取层,就类似于SIFT算法一样,可以用于提取各种图片的特征,而f6、f7所学习到的特征是用于针对特定任务的特征。打个比方:对于人脸性别识别来说,一个CNN模型前面的卷积层所学习到的特征就类似于学习人脸共性特征,然后全连接层所学习的特征就是针对性别分类的特征了。
还有另外一个疑问:CNN训练的时候,本来就是对bounding box的物体进行识别分类训练,是一个端到端的任务,在训练的时候最后一层softmax就是分类层,那么为什么作者闲着没事干要先用CNN做特征提取(提取fc7层数据),然后再把提取的特征用于训练svm分类器?这个是因为svm训练和cnn训练过程的正负样本定义方式各有不同,导致最后采用CNN softmax输出比采用svm精度还低。
事情是这样的,cnn在训练的时候,对训练数据做了比较宽松的标注,比如一个bounding box可能只包含物体的一部分,那么我也把它标注为正样本,用于训练cnn;采用这个方法的主要原因在于因为CNN容易过拟合,所以需要大量的训练数据,所以在CNN训练阶段我们是对Bounding box的位置限制条件限制的比较松(IOU只要大于0.5都被标注为正样本了);
然而svm训练的时候,因为svm适用于少样本训练,所以对于训练样本数据的IOU要求比较严格,我们只有当bounding box把整个物体都包含进去了,我们才把它标注为物体类别,然后训练svm,具体请看下文。
SVM训练、测试阶段
这是一个二分类问题,我么假设我们要检测车辆。我们知道只有当bounding box把整量车都包含在内,那才叫正样本;如果bounding box 没有包含到车辆,那么我们就可以把它当做负样本。但问题是当我们的检测窗口只有部分包好物体,那该怎么定义正负样本呢?作者测试了IOU阈值各种方案数值0,0.1,0.2,0.3,0.4,0.5。最后我们通过训练发现,如果选择IOU阈值为0.3效果最好(选择为0精度下降了4个百分点,选择0.5精度下降了5个百分点),即当重叠度小于0.3的时候,我们就把它标注为负样本。一旦CNN f7层特征被提取出来,那么我们将为每个物体类训练一个svm分类器。当我们用CNN提取2000个候选框,可以得到2000*4096这样的特征向量矩阵,然后我们只需要把这样的一个矩阵与svm权值矩阵4096*N点乘(N为分类类别数目,因为我们训练的N个svm,每个svm包好了4096个W),就可以得到结果了。
bbox regression网络训练:
候选的bbox,与gt的bbox的IoU大于阈值,这个bbox才会作为正类。对于N各类别。训练N个不同的bbox regression。给定一个bbox的中心和长宽,以及cnn学习出来的pool5后的特征,学习gt bbox的中心还有长宽。目标函数:
f=(t−wTϕ(pool5))2+λ||w||2
这里不是直接学习,bbox的中心还有长宽。而是学习出gt bbox和候选bbox的相对关系。用的是ridge regression。ϕ(pool5)指的是pool5的线性组合的函数。
给出一张图片的objectdet结果
对于产生的bbox,通过SVM可以知道每个类上的score。取得分最高的那个类。将这个bbox输入到得分最高的那个类对应的bbox regression,得到校正后的Bbox。














 2675
2675











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









