







HOG(Histogram of Oriented Gradients)
HOG描述子高维图像特征向量常规生成步骤:
1.图像归一化;
2.利用一阶微分计算图像梯度;
3.基于梯度幅值的方向权重投影;
4.HOG特征向量归一化;
5.得出HOG最终的特征向量
提高检测器对光照的鲁棒性,由于实际的应用场景人体目标可能出现在各种不同的场合,检测器对光照不太敏感才会取得较好的效果。
步骤 2 利用一阶微分计算图像梯度
灰度图像,为去除噪点,会先利用离散高斯平滑模板进行平滑:高斯函数在不同平滑尺度下对灰度图像进行平滑操作。Dalal等人的实验表明,不做高斯平滑时人体检测效果最佳,错误率缩小了约一倍。不进行平滑操作的可能原因:图像是基于边缘的,平滑操作会降低边缘信息的对比度,从而减少图像中的人体信号信息。
步骤 3 基于梯度幅值的方向权重投影
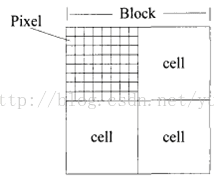
HOG结构:常用HOG结构大致有三种:矩形HOG(简称为R-HOG),圆形HOG和中心环绕HOG。它们的单位均为Block(块)。dalal的试验证明矩形HOG和圆形HOG的检测效果基本一致,而环绕形HOG效果相对差一些。矩形HOG块的划分:一般一个Block(块)都由若干Cell(单元)组成,一个单元都有如干个像素点组成。
在每个Cell中都独立做梯度方向统计,从而以梯度方向为横轴的的直方图,梯度方向可取0度到180度或0度到360度,但dalal等人的实验表明,对于人体目标检测0度到180度这种忽略度数正负级的方向范围能够取得更好的结果。然后又将这个梯度分布平均分成若干个方向角度(orientation bins),每个方向角度范围都会对应一个直方柱。实际根据dalal等人实验证实,在人体目标检测中,在无符号方向角度范围并将其平均分成9份(bins)能取得最好的效果,当bin的数目继续增大时效果改变不明显,在人体目标检测中常使用bin数目为9范围0到180度的度量方式。
对梯度方向的投影权重方式的选取: 对于梯度方向的加权投影,一般都采用一个权重投影函数,它可以是像素点的梯度幅值,梯度幅值的平方根或梯度幅值的平方,甚至可以使梯度幅值的省略形式,它们都能够一定程度上反应出像素上一定的边缘信息。根据Dalal等人论文的测试结果,采用梯度幅值量级本身得到的检测效果最佳,使用量级的平方根会轻微降低检测结果,而使用二值的边缘权值表示会严重降低效果(约为5%个单位10-4FPPW(False Positives Per Window))。
块与块之间的关系,通常是将某个变量范围固定划分为几个区域,由于边界变量与相邻区域具有相关性,所以变量只对一个区域进行投影而对相邻区域完全无关时会对其他区域产生混叠效应。采用块重叠,重复统计计算或者线性插值权重分配的方式解决混叠问题。
Dalal等人在他们那篇关于HOG最为经典的论文《Histogram of Oriented Gradient for Human Detection》提出了利用块与块的重叠(Overlap)来解决混叠,并且取得了不错的效果。 在重叠方式中,块与块之间的边缘点被重复根据权重投影到各自相邻块(block)中,从而一定模糊了块与块之间的边界,处于块边缘部分的像素点也能够给相邻块中的方向梯度直方图提供一定贡献,从而达到关联块与块之间的关系的作用。dalal对于块和块之间相互重叠程度对人体目标检测识别率影响也做了实验分析。
利用线性插值的方法解决分块之间联系问题:有些文献采用的不是块与块重叠的方法,而是采用线性插值的方法来削弱混叠效应。这种方法的主要思想是每个Block都对临近的Block都有影响,这种影响,我们可以以一种加权方式附加上去。
步骤 4:HOG特征向量归一化
我们要对block块内的HOG特征向量进行归一化。对block块内特征向量的归一化主要是为了使特征向量空间对光照,阴影和边缘变化具有鲁棒性。还有归一化是针对每一个block进行的,一般采用的归一化函数有以下四种:
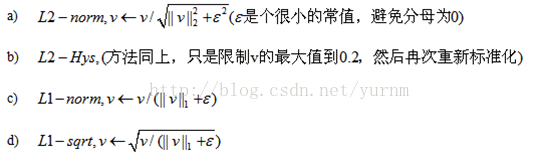
在人体检测系统中进行HOG计算时一般使用L2-norm,dalal的文章也验证了对于人体检测系统使用L2-norm效果最好。
步骤 5 HOG最终的特征向量生成















 3657
3657











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









