







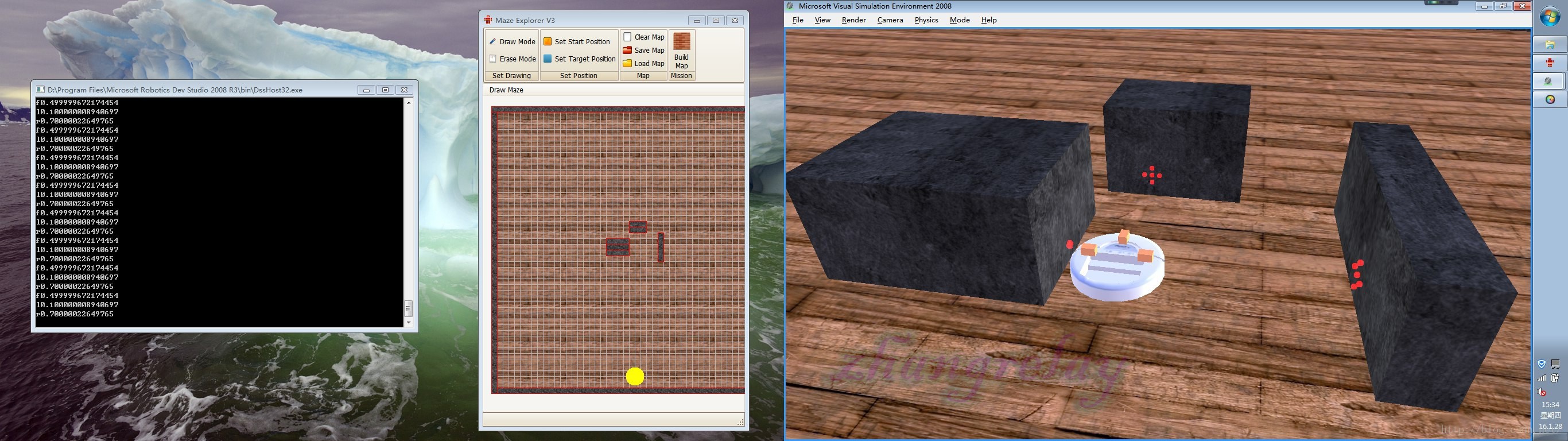
这几年扫地机器人越来越火,其路径规划由最初随机算法,到简单规划算法,再到激光slam以及视觉slam算法等,代表机器人国外有irobot等几家公司,国内有科沃斯等,最近尝试了一下最基本的仿真,其他功能后续完善。
----------------------------------------------------------------------------------------------------------------------------------------------------------
课题1:室内清扫机器人路径规划算法
研究对象:两轮差动的移动机器人
研究内容:室内环境,机器人区域覆盖算法。解释:清扫机器人的路径规划,就是在可自由移动空间的全区域覆盖,即对区域覆盖算法的研究。
研究目的:在室内环境下,寻找一条无碰撞的清扫机器人路径规划,环境对于机器人而言是未知的,首先是清扫区域的最大化,清扫效率达90%,即在室内环境可移动范围内区域覆盖要达到90%,在完成上述基本指标后,对清扫效率进行优化,使在完成同样清扫效率的情况下,清扫时间逐渐缩短。简言之,空间最大化,时间最小化。
研究方法:融合测距传感器和碰撞传感器的避障算法,清扫策略的选择等。
研究草案需要思考:
1. 机器人包括传感器(真实或虚拟)、执行器(电机)和控制器(MCU或算法核心):
2. 数学模型:
3. 物理模型:
4. 两轮差动机器人运动学模型:
5. 路径规划与速度之间的关系:
6. 传感器感知环境和自身信息:
7. 路径规划策略:
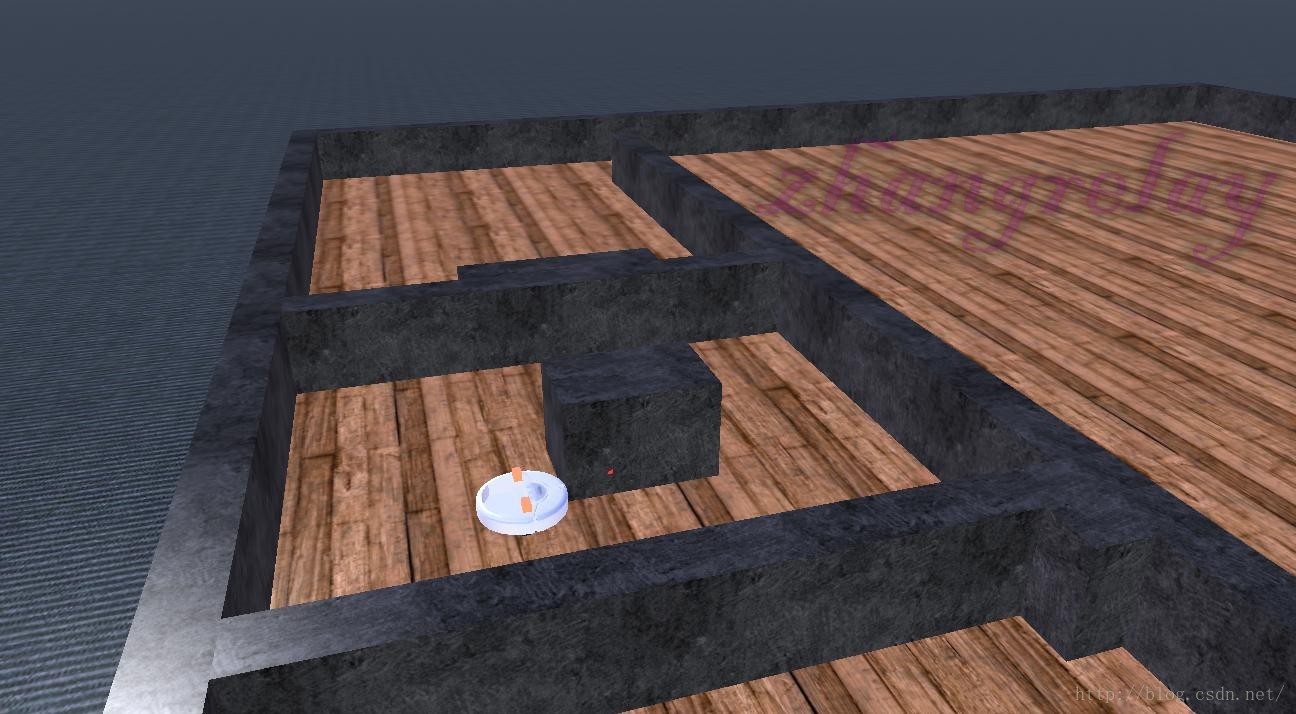
基本性能测试标准化环境:
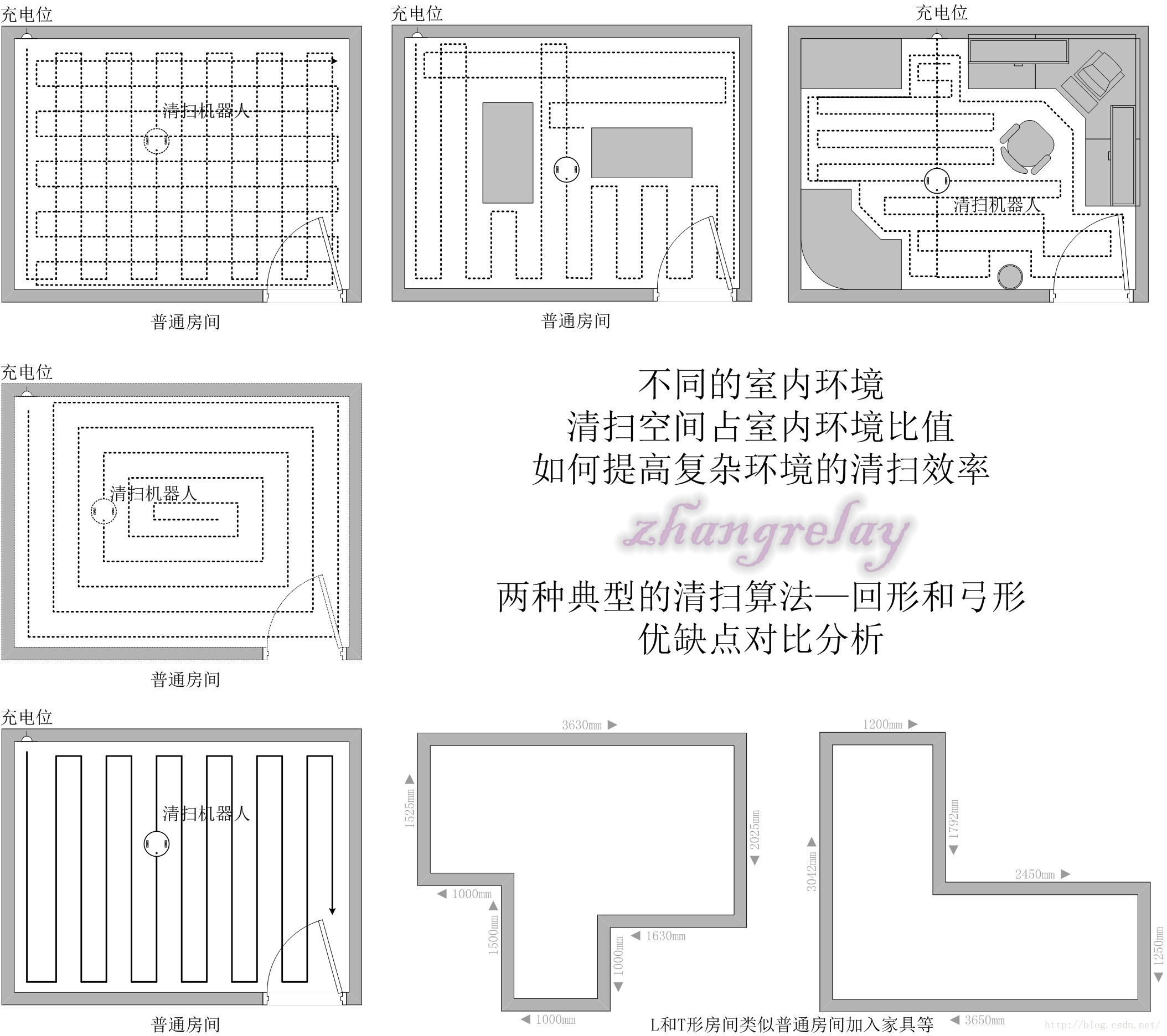
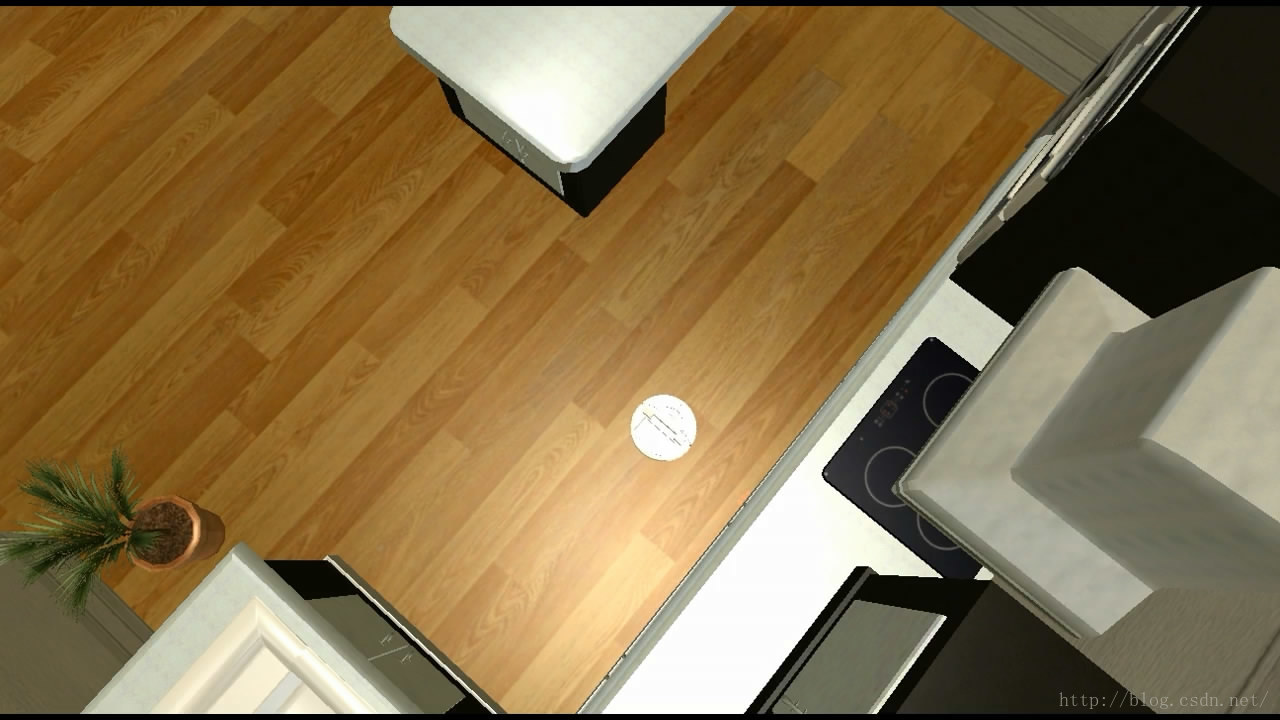
常用室内环境:
















 1230
1230











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











