







 本文介绍了哈希表的基本原理,包括哈希函数构造方法、处理冲突的技术及查找过程,并探讨了Bloom Filter的概念及其在存储空间有限时如何通过允许一定错误率来提高存储效率。
本文介绍了哈希表的基本原理,包括哈希函数构造方法、处理冲突的技术及查找过程,并探讨了Bloom Filter的概念及其在存储空间有限时如何通过允许一定错误率来提高存储效率。
Hash表中的一些原理/概念,及根据这些原理/概念:
一. Hash表概念
二. Hash构造函数的方法,及适用范围
三. Hash处理冲突方法,各自特征
四. Hash查找过程
五. 实现一个使用Hash存数据的场景-------Hash查找算法,插入算法
六. JDK中HashMap的实现
七. Hash表与HashMap的对比,性能分析
一. Hash表概念
在查找表中我们已经说过,在Hash表中,记录在表中的位置和其关键字之间存在着一种确定的关系。这样 我们就能预先知道所查关键字在表中的位置,从而直接通过下标找到记录。使ASL趋近与0.
1) 哈希(Hash)函数是一个映象,即: 将关键字的集合映射到某个地址集合上,它的设置很灵活,只要这个地址集合的大小不超出允许范围即可;
2) 由于哈希函数是一个压缩映象,因此,在一般情况下,很容易产生“冲突”现象,即: key1¹ key2,而 f (key1) = f(key2)。
3). 只能尽量减少冲突而不能完全避免冲突,这是因为通常关键字集合比较大,其元素包括所有可能的关键字,而地址集合的元素仅为哈希表中的地址值
在构造这种特殊的“查找表” 时,除了需要选择一个“好”(尽可能少产生冲突)的哈希函数之外;还需要找到一种“处理冲突” 的方法。
二 . Hash构造函数的方法,及适用范围
- 直接定址法
- 数字分析法
- 平方取中法
- 折叠法
- 除留余数法
- 随机数法
(1)直接定址法:
哈希函数为关键字的线性函数,H(key) = key 或者 H(key) = a ´ key + b
此法仅适合于:地址集合的大小 = = 关键字集合的大小,其中a和b为常数。
(2)数字分析法:
假设关键字集合中的每个关键字都是由 s 位数字组成 (u1, u2, …, us),分析关键字集中的全体, 并从中提取分布均匀的若干位或它们的组合作为地址。
此法适于:能预先估计出全体关键字的每一位上各种数字出现的频度。
(3)平方取中法:
以关键字的平方值的中间几位作为存储地址。求“关键字的平方值” 的目的是“扩大差别” ,同时平方值的中间各位又能受到整个关键字中各位的影响。
此法适于:关键字中的每一位都有某些数字重复出现频度很高的现象。
(4)折叠法:
将关键字分割成若干部分,然后取它们的叠加和为哈希地址。两种叠加处理的方法:移位叠加:将分割后的几部分低位对齐相加;间界叠加:从一端沿分割界来回折叠,然后对齐相加。
此法适于:关键字的数字位数特别多。
(5)除留余数法:
设定哈希函数为:H(key) = key MOD p ( p≤m ),其中, m为表长,p 为不大于 m 的素数,或是不含 20 以下的质因子
(6)随机数法:
设定哈希函数为:H(key) = Random(key)其中,Random 为伪随机函数
此法适于:对长度不等的关键字构造哈希函数。
实际造表时,采用何种构造哈希函数的方法取决于建表的关键字集合的情况(包括关键字的范围和形态),以及哈希表 长度(哈希地址范围),总的原则是使产生冲突的可能性降到尽可能地小。
三. Hash处理冲突方法,各自特征
“处理冲突” 的实际含义是:为产生冲突的关键字寻找下一个哈希地址。
- 开放定址法
- 再哈希法
- 链地址法
(1)开放定址法:
为产生冲突的关键字地址 H(key) 求得一个地址序列: H0, H1, H2, …, Hs 1≤s≤m-1,Hi = ( H(key)+di ) MOD m,其中: i=1, 2, …, s,H(key)为哈希函数;m为哈希表长;
(2)链地址法:

将所有哈希地址相同的记录都链接在同一链表中。
(3)再哈希法:
方法:构造若干个哈希函数,当发生冲突时,根据另一个哈希函数计算下一个哈希地址,直到冲突不再发生。即:Hi=Rhi(key) i=1,2,……k,其中:Rhi——不同的哈希函数,特点:计算时间增加
四. Hash查找过程
对于给定值 K,计算哈希地址 i = H(K),若 r[i] = NULL 则查找不成功,若 r[i].key = K 则查找成功, 否则 “求下一地址 Hi” ,直至r[Hi] = NULL (查找不成功) 或r[Hi].key = K (查找成功) 为止。
五. 实现一个使用Hash存数据的场景-------Hash查找算法,插入算法
假设我们要设计的是一个用来保存在校学生个人信息的数据表。因为在校学生数量也不是特别巨大(8W?),每个学生的学号是唯一的,因此,我们可以简单的应用直接定址法,声明一个10W大小的数组,每个学生的学号作为主键。然后每次要添加或者查找学生,只需要根据需要去操作即可。
但是,显然这样做是很脑残的。这样做系统的可拓展性和复用性就非常差了,比如有一天人数超过10W了?如果是用来保存别的数据呢?或者我只需要保存20条记录呢?声明大小为10W的数组显然是太浪费了的。
如果我们是用来保存大数据量(比如银行的用户数,4大的用户数都应该有3-5亿了吧?),这时候我们计算出来的HashCode就很可能会有冲突了, 我们的系统应该有“处理冲突”的能力,此处我们通过挂链法“处理冲突”。
如果我们的数据量非常巨大,并且还持续在增加,如果我们仅仅只是通过挂链法来处理冲突,可能我们的链上挂了上万个数据后,这个时候再通过静态搜索来查找链表,显然性能也是非常低的。所以我们的系统应该还能实现自动扩容,当容量达到某比例后,即自动扩容,使装载因子保存在一个固定的水平上。
什么时候ReHash
在介绍HashMap的内部实现机制时提到了两个参数,DEFAULT_INITIAL_CAPACITY和DEFAULT_LOAD_FACTOR,DEFAULT_INITIAL_CAPACITY是table数组的容量,DEFAULT_LOAD_FACTOR则是为了最大程度避免哈希冲突,提高HashMap效率而设置的一个影响因子,将其乘以DEFAULT_INITIAL_CAPACITY就得到了一个阈值threshold,当HashMap的容量达到threshold时就需要进行扩容,这个时候就要进行ReHash操作了,可以看到下面addEntry函数的实现,当size达到threshold时会调用resize函数进行扩容。
void addEntry(int hash, K key, V value, int bucketIndex) {
ntry<K,V> e = table[bucketIndex];
table[bucketIndex] = new Entry<K,V>(hash, key, value, e);
if (size++ >= threshold)
resize(2 * table.length);
} 在扩容的过程中需要进行ReHash操作,而这是非常耗时的,在实际中应该尽量避免。
Bloom Filter概念和原理
Bloom Filter是一种空间效率很高的随机数据结构,它利用位数组很简洁地表示一个集合,并能判断一个元素是否属于这个集合。Bloom Filter的这种高效是有一定代价的:在判断一个元素是否属于某个集合时,有可能会把不属于这个集合的元素误认为属于这个集合(false positive)。因此,Bloom Filter不适合那些“零错误”的应用场合。而在能容忍低错误率的应用场合下,Bloom Filter通过极少的错误换取了存储空间的极大节省。
集合表示和元素查询
下面我们具体来看Bloom Filter是如何用位数组表示集合的。初始状态时,Bloom Filter是一个包含m位的位数组,每一位都置为0。

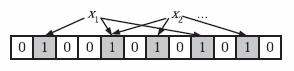
为了表达S={x1, x2,…,xn}这样一个n个元素的集合,Bloom Filter使用k个相互独立的哈希函数(Hash Function),它们分别将集合中的每个元素映射到{1,…,m}的范围中。对任意一个元素x,第i个哈希函数映射的位置hi(x)就会被置为1(1≤i≤k)。注意,如果一个位置多次被置为1,那么只有第一次会起作用,后面几次将没有任何效果。在下图中,k=3,且有两个哈希函数选中同一个位置(从左边数第五位)。
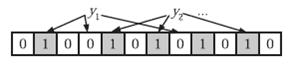
在判断y是否属于这个集合时,我们对y应用k次哈希函数,如果所有hi(y)的位置都是1(1≤i≤k),那么我们就认为y是集合中的元素,否则就认为y不是集合中的元素。下图中y1就不是集合中的元素。y2或者属于这个集合,或者刚好是一个false positive。
错误率估计
前面我们已经提到了,Bloom Filter在判断一个元素是否属于它表示的集合时会有一定的错误率(false positive rate),下面我们就来估计错误率的大小。在估计之前为了简化模型,我们假设kn<m且各个哈希函数是完全随机的。当集合S={x1, x2,…,xn}的所有元素都被k个哈希函数映射到m位的位数组中时,这个位数组中某一位还是0的概率是:
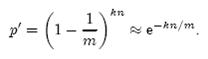
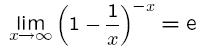
其中1/m表示任意一个哈希函数选中这一位的概率(前提是哈希函数是完全随机的),(1-1/m)表示哈希一次没有选中这一位的概率。要把S完全映射到位数组中,需要做kn次哈希。某一位还是0意味着kn次哈希都没有选中它,因此这个概率就是(1-1/m)的kn次方。令p = e-kn/m是为了简化运算,这里用到了计算e时常用的近似:
令ρ为位数组中0的比例,则ρ的数学期望E(ρ)= p’。在ρ已知的情况下,要求的错误率(false positive rate)为:

(1-ρ)为位数组中1的比例,(1-ρ)k就表示k次哈希都刚好选中1的区域,即false positive rate。上式中第二步近似在前面已经提到了,现在来看第一步近似。p’只是ρ的数学期望,在实际中ρ的值有可能偏离它的数学期望值。M. Mitzenmacher已经证明[2] ,位数组中0的比例非常集中地分布在它的数学期望值的附近。因此,第一步的近似得以成立。分别将p和p’代入上式中,得:
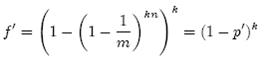

相比p’和f’,使用p和f通常在分析中更为方便。
最优的哈希函数个数
既然Bloom Filter要靠多个哈希函数将集合映射到位数组中,那么应该选择几个哈希函数才能使元素查询时的错误率降到最低呢?这里有两个互斥的理由:如果哈希函数的个数多,那么在对一个不属于集合的元素进行查询时得到0的概率就大;但另一方面,如果哈希函数的个数少,那么位数组中的0就多。为了得到最优的哈希函数个数,我们需要根据上一小节中的错误率公式进行计算。
先用p和f进行计算。注意到f = exp(k ln(1 − e−kn/m)),我们令g = k ln(1 − e−kn/m),只要让g取到最小,f自然也取到最小。由于p = e-kn/m,我们可以将g写成
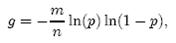
根据对称性法则可以很容易看出当p = 1/2,也就是k = ln2· (m/n)时,g取得最小值。在这种情况下,最小错误率f等于(1/2)k ≈ (0.6185)m/n。另外,注意到p是位数组中某一位仍是0的概率,所以p = 1/2对应着位数组中0和1各一半。换句话说,要想保持错误率低,最好让位数组有一半还空着。
需要强调的一点是,p = 1/2时错误率最小这个结果并不依赖于近似值p和f。同样对于f’ = exp(k ln(1 − (1 − 1/m)kn)),g’ = k ln(1 − (1 − 1/m)kn),p’ = (1 − 1/m)kn,我们可以将g’写成

同样根据对称性法则可以得到当p’ = 1/2时,g’取得最小值。、
位数组的大小
下面我们来看看,在不超过一定错误率的情况下,Bloom Filter至少需要多少位才能表示全集中任意n个元素的集合。假设全集中共有u个元素,允许的最大错误率为є,下面我们来求位数组的位数m。
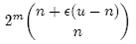
假设X为全集中任取n个元素的集合,F(X)是表示X的位数组。那么对于集合X中任意一个元素x,在s = F(X)中查询x都能得到肯定的结果,即s能够接受x。显然,由于Bloom Filter引入了错误,s能够接受的不仅仅是X中的元素,它还能够є (u - n)个false positive。因此,对于一个确定的位数组来说,它能够接受总共n + є (u - n)个元素。在n + є (u - n)个元素中,s真正表示的只有其中n个,所以一个确定的位数组可以表示

个集合。m位的位数组共有2m个不同的组合,进而可以推出,m位的位数组可以表示
个集合。全集中n个元素的集合总共有

个,因此要让m位的位数组能够表示所有n个元素的集合,必须有
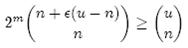
即:

上式中的近似前提是n和єu相比很小,这也是实际情况中常常发生的。根据上式,我们得出结论:在错误率不大于є的情况下,m至少要等于n log2(1/є)才能表示任意n个元素的集合。
上一小节中我们曾算出当k = ln2· (m/n)时错误率f最小,这时f = (1/2)k = (1/2)mln2 / n。现在令f≤є,可以推出

这个结果比前面我们算得的下界n log2(1/є)大了log2 e ≈ 1.44倍。这说明在哈希函数的个数取到最优时,要让错误率不超过є,m至少需要取到最小值的1.44倍。
总结
在计算机科学中,我们常常会碰到时间换空间或者空间换时间的情况,即为了达到某一个方面的最优而牺牲另一个方面。Bloom Filter在时间空间这两个因素之外又引入了另一个因素:错误率。在使用Bloom Filter判断一个元素是否属于某个集合时,会有一定的错误率。也就是说,有可能把不属于这个集合的元素误认为属于这个集合(False Positive),但不会把属于这个集合的元素误认为不属于这个集合(False Negative)。在增加了错误率这个因素之后,Bloom Filter通过允许少量的错误来节省大量的存储空间。
自从Burton Bloom在70年代提出Bloom Filter之后,Bloom Filter就被广泛用于拼写检查和数据库系统中。近一二十年,伴随着网络的普及和发展,Bloom Filter在网络领域获得了新生,各种Bloom Filter变种和新的应用不断出现。可以预见,随着网络应用的不断深入,新的变种和应用将会继续出现,Bloom Filter必将获得更大的发展。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









