







本编博文主要讲述了论文: A Color-Based Particle Filter 里面的主要内容啊。
粒子滤波器的主要步骤就包括五步:
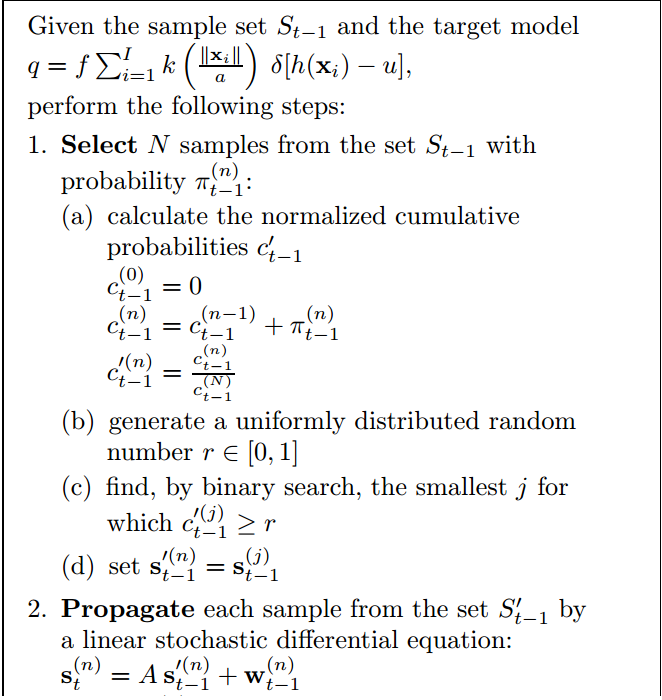
第一步 :生成初代粒子集合
第二步 :让粒子集合在状态空间转播(Propagate):对应于系统动态方程
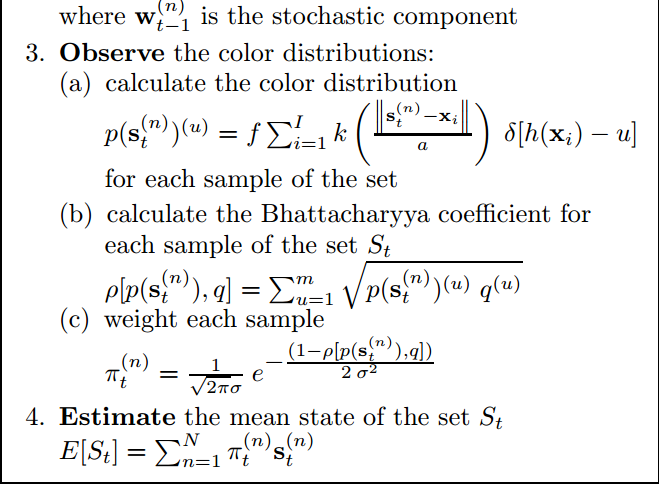
第三步 :获得当前时刻的观测,并根据观测更新粒子权重:对应于观测方程
第四步 :估计当前状态的均值统计量
第五步 : 重采样,获得当前时刻的新一代粒子集合。然后回到第二步继续。
细节信息如下所示:(木有翻译,主要是怕拿捏不准,误人子弟,\(^o^)/~)
颜色分布特征的好处:对部分遮挡鲁棒,对旋转和尺度不明感,计算简单方便。
每个粒子的状态就是在目标周围取的一些矩形框的位置坐标以及矩形框的长和宽(这是零阶模型),如果是一阶模型,那么状态里面还要包括矩形框的移动速度,长和宽的变化率。
每个粒子的观测值就是该粒子所在区域的图像颜色特征直方图(加权的)。
每个粒子的在其状态下的权重就是该粒子的矩形区域的颜色直方图与目标的颜色直方图的巴氏系数。通过计算某个粒子与目标的直方图的巴氏距离,并且假定所有粒子与目标的巴氏距离服从高斯分布,则会有下式出现:

上式中的计算结果就是下次粒子集合重采样的概率,被称为接受概率。,而Sigma则是观测噪声。
根据我的程序观察,发现把状态估计放在重采样之后,跟踪框会更加稳定一些啊。
下面是本博主看到的其他一些有趣的解释,不防也看看吧:
关于粒子滤波器的介绍,请看我之前的博文!
在后续博文中我会把我写的代码分享出来,供大家参考学习,\(^o^)/~!!!














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









