







图像分割是一种重要的图像处理技术,而区域生长是图像分割技术的一种。区域生长的基本思想是将具有相似性的像素集合起来构成区域。首先对每个需要分割的区域找出一个种子像素作为生长的七点,然后将种子像素周围邻域中与种子有相同或相似性质的像素(根据事先确定的生长或相似准则来确定)合并到种子像素所在的区域中。而新的像素继续作为种子向四周生长,直到再没有满足条件的像素可以包括进来,一个区域就生长而成了。
种子区域生长(region seeds growing, RSG)算法在实践中关键的问题是种子的选取和相似区域判定准则的确定。种子的选择可以人工选择,也可以通过一些方法自动选取;灰度图的判定准则一般用灰度差值小于某个阈值来表示,不同的判定准则可能会产生不同的分割结果。
为了说明区域是如何生长的,本文从最简单的情况出发:使用二值图像;人工选取种子;判定准则为是否是前景像素。
区域生长实现的步骤如下:
1. 对图像顺序扫描!找到第1个还没有归属的像素, 设该像素为(x0, y0);
2. 以(x0, y0)为中心, 考虑(x0, y0)的8邻域像素(x, y)如果(x0, y0)满足生长准则, 将(x, y)与(x0, y0)合并(在同一区域内), 同时将(x, y)压入堆栈;
3. 从堆栈中取出一个像素, 把它当作(x0, y0)返回到步骤2;
4. 当堆栈为空时!返回到步骤1;
5. 重复步骤1 - 4直到图像中的每个点都有归属时。生长结束。
- #include <iostream>
- #include <stack>
- #include <opencv2\opencv.hpp>
- using namespace std;
- using namespace cv;
- // 8 邻域
- static Point connects[8] = { Point(-1, -1), Point(0, -1), Point(1, -1), Point(1, 0), Point(1, 1), Point(0, 1), Point(-1, 1), Point(-1, 0)};
- int main()
- {
- // 原图
- Mat src = imread(”img2.jpg”, 0);
- // 结果图
- Mat res = Mat::zeros(src.rows, src.cols, CV_8U);
- // 用于标记是否遍历过某点
- Mat flagMat;
- res.copyTo(flagMat);
- // 二值图像
- Mat bin;
- threshold(src, bin, 80, 255, CV_THRESH_BINARY);
- // 初始3个种子点
- stack<Point> seeds;
- seeds.push(Point(0, 0));
- seeds.push(Point(186, 166));
- seeds.push(Point(327, 43));
- res.at<uchar>(0, 0) = 255;
- res.at<uchar>(166, 186) = 255;
- res.at<uchar>(43, 327) = 255;
- while (!seeds.empty())
- {
- Point seed = seeds.top();
- seeds.pop();
- // 标记为已遍历过的点
- flagMat.at<uchar>(seed.y, seed.x) = 1;
- // 遍历8邻域
- for (size_t i = 0; i < 8; i++)
- {
- int tmpx = seed.x + connects[i].x;
- int tmpy = seed.y + connects[i].y;
- if (tmpx < 0 || tmpy < 0 || tmpx >= src.cols || tmpy >= src.rows)
- continue;
- // 前景点且没有被标记过的点
- if (bin.at<uchar>(tmpy, tmpx) != 0 && flagMat.at<uchar>(tmpy, tmpx) == 0)
- {
- res.at<uchar>(tmpy, tmpx) = 255; // 生长
- flagMat.at<uchar>(tmpy, tmpx) = 1; // 标记
- seeds.push(Point(tmpx, tmpy)); // 种子压栈
- }
- }
- }
- imshow(”RES”,res);
- imwrite(”res.jpg”, res);
- waitKey(0);
- return 1;
- }

#include <iostream>
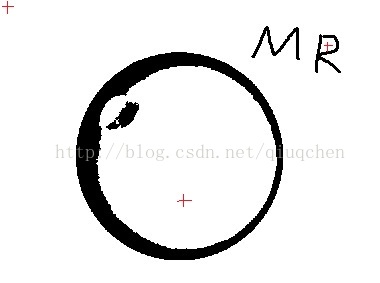
上面的代码通过人工选择了三个种子,它们在原图中的大致位置如下(红色十字中心):
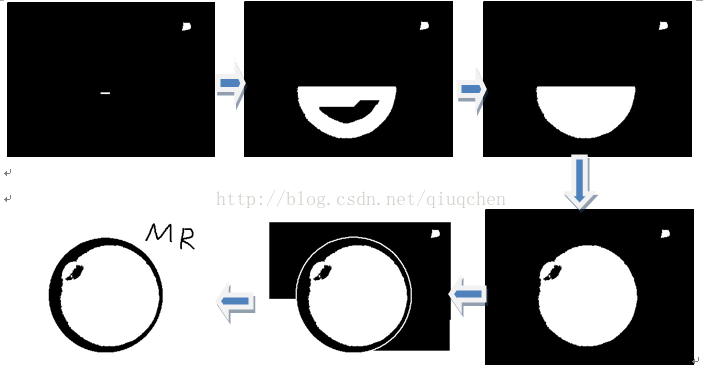
区域生长的过程:
工程:














 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









