







1.僵尸进程:前文已经对僵尸进程的定义进行了说明。那么defunct进程只是在process table(进程表项)里有一个记录,其他的资源没有占用,除非你的系统的process个数已经快超过限制了,zombie进程不会有更多的坏处。
2.产生原因:在子进程终止后到父进程调用wait()前的时间里,子进程被称为zombie;
具体a. 子进程结束后向父进程发出SIGCHLD信号,父进程默认忽略了它
b. 父进程没有调用wait()或waitpid()函数来等待子进程的结束
c. 网络原因有时会引起僵尸进程;
3. 危害
僵尸进程会占用系统资源,如果很多,则会严重影响服务器的性能;
孤儿进程不会占用系统资源,最终是由init进程托管,由init进程来释放;
signal(SIGCHLD, SIG_IGN); // 忽略SIGCHLD信号,这是一个常用于提升并发服务器性能的技巧
// 因为并发服务器常常fork很多子进程,子进程终结之后需要服务器进程去wait清理资源。
// 如果将此信号的处理方式设置为忽略,可让内核把僵尸进程转交给init进程去处理,省去了大量僵尸进 程占用系统资源。
4.如何防止僵尸进程
(1) 让僵尸进程成为孤儿进程,由init进程回收;(手动杀死父进程)
(2) 调用fork()两次;
(3) 捕捉SIGCHLD信号,并在信号处理函数中调用wait函数;
下面给出一个具体的案例来说明这种方法。
#include <signal.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
void sig_handler(int signo)
{
printf("child process deaded, signo: %d\n", signo);
wait(0);// 当捕获到SIGCHLD信号,父进程调用wait回收,避免子进程成为僵尸进程
}
void out(int n)
{
int i;
for(i = 0; i < n; ++i)
{
printf("%d out %d\n", getpid(), i);
sleep(2);
}
}
int main(void)
{
// 登记一下SIGCHLD信号
if(signal(SIGCHLD, sig_handler) == SIG_ERR)
{
perror("signal sigchld error");
}
pid_t pid = fork();
if(pid < 0)
{
perror("fork error");
exit(1);
}
else if(pid > 0)
{
// parent process
out(100);
}
else
{
// child process
out(10);
}
return 0;
}(4) 让僵尸进程的父进程来回收,父进程每隔一段时间来查询子进程是否结束并回收,调用wait()或者waitpid(),通知内核释放僵尸进程;
wait函数的原型是:
#include <sys/types.h>
#include <sys/wait.h>
pid_t wait(int *status);
进程一旦调用了wait,就立即阻塞自己,由wait自动分析是否当前进程的某个子进程已经退出,如果让它找到了这样一个已经变成僵尸进程的子进程,wait就会收集这个子进程的信息,并把它彻底销毁后返回;如果没有找到这样一个子进程,wait就会一直阻塞在这里,直到有一个这样的进程出现为止。
参数status用来保存被回收进程退出时的一些状态,如果我们不想知道这个子进程是如何死掉的,只想把它消灭掉的话,那么我们可以设定这个参数为NULL,就像下面这样:
pid = wait(NULL);
如果成功,wait会返回被回收子进程的进程ID,如果调用进程没有子进程,调用就会失败,此时wait返回-1,同时errno被置为ECHILD。
waitpid函数的原型是:
#include <sys/types.h>
#include <sys/wait.h>
pid_t waitpid(pid_t pid, int *status, int options);
waitpid相比于wait函数多了两个参数,下面对这两个参数做一个详细说明。
pid
从参数的名字pid和类型pid_t 就可以看出,这里需要的是一个进程ID。当pid取不同的值时,在这里有不同的意义。
- pid > 0时,只等待进程ID等于pid的子进程,不管其他已经有多少个子进程运行结束退出了,只要指定的子进程还没结束,waitpid就会一直等下去;
- pid = -1时,等待任何一个子进程退出,没有 任何限制,此时和wait函数作用一样;
- pid = 0时,等待同一个进程组中的任何子进程,如果 子进程已经加入了别的进程组,waitpid不会对它做任何理睬;
- pid < -1时,等待一个指定进程组中的任何子进程,这个进程组的ID等于pid的绝对值;
options目前只支持WNOHANG和WUNTRACED两个选项,这是两个常数,可以用“|”运算符把它们连接起来使用,比如:
ret = waitpid(-1, NULL, WNOHANG | WUNTRACED);
如果我们不想使用它们,也可以把options设为0,如:
ret = waitpid(-1, NULL, 0);
如果使用了WNOHANG参数调用waitpid,即使没有子进程退出,它也会立即返回,不会像wait那样永远等下去;
返回值和错误:
waitpid的返回值比wait稍微复杂一些,一共有三种情况。
- 当正常返回时,waitpid返回收集到的子进程的进程ID;
- 如果设置了选项WNOHANG,而调用中waitpid发现没有已退出的子进程可以收集,则返回0;(非阻塞)
- 如果调用中出错,则返回-1,这时errno会被设置成相应的值以指示错误所在;
- 在一个子进程终止前,wait使其调用者阻塞,而waitpid则提供了非阻塞版本;
- waitpid等待一个指定的子进程,而wait等待第一个终止的子进程;
- waitpid支持作业控制(以WUNTRACED选项,由pid指定的任一子进程状态,且其状态自暂停以来还未报告过,则返回其状态);
a.WIFEXITED/WEXITSTATUS(status)
若为正常终止子进程返回的状态,则为真。b.WIFSIGNALED/WTERMSIG(status)
若为异常终止子进程返回的状态,则为真(接到一个不能捕捉的信号)
c.WIFSTOPPED/WSTOPSIG(status) (看当前子进程在终止前是否暂停过)
若为当前暂停子进程的返回状态,则为真。
===============================================================
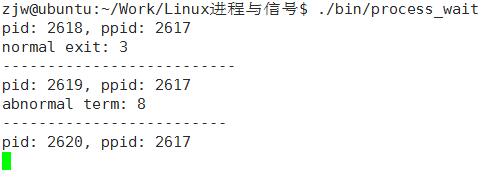
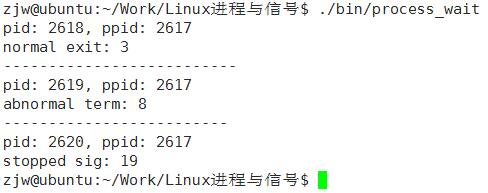
下面以一个案例来说明wait和waitpid的用法
#include <unistd.h>
#include <string.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/wait.h>
#include <sys/types.h>
void out_status(int status)
{
// printf("status: %d\n", status);
if(WIFEXITED(status))//正常终止
{
printf("normal exit: %d\n", WEXITSTATUS(status));
}
else if(WIFSIGNALED(status))// 非正常终止
{
printf("abnormal term: %d\n", WTERMSIG(status));
}
else if(WIFSTOPPED(status))// 终止前是否暂停过
{
printf("stopped sig: %d\n", WSTOPSIG(status));
}
else//未知
{
printf("unknown sig\n");
}
}
int main(void)
{
int status;
pid_t pid;
// 正常终止
if((pid = fork()) < 0)
{
perror("fork error");
exit(1);
}
else if(pid == 0)
{
printf("pid: %d, ppid: %d\n", getpid(), getppid());
exit(3);// 子进程终止运行(状态码为3也算是一种正常终止)
}
// 父进程调用阻塞,等待子进程结束并回收
wait(&status);
out_status(status);
printf("--------------------------\n");
//异常终止
if((pid = fork()) < 0)
{
perror("fork error");
exit(1);
}
else if(pid == 0)
{
printf("pid: %d, ppid: %d\n", getpid(), getppid());
int i = 3, j = 0;
int k = i / j;
printf("k: %d\n", k);
}
wait(&status);
out_status(status);
printf("-------------------------\n");
if((pid = fork()) < 0)
{
perror("fork error");
exit(1);
}
else if(pid == 0)
{
printf("pid: %d, ppid: %d\n", getpid(), getppid());
pause();// 暂停,等待一个信号来唤醒/终止
/* int i = 0;
while(++i > 0)
sleep(3);
*/
}
//wait(&status);
// 用waitpid的非阻塞方式
do
{
pid = waitpid(pid, &status, WNOHANG | WUNTRACED);
if(pid == 0)
sleep(1);
}while(pid == 0);
out_status(status);
return 0;
}















 1082
1082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









