






百度Apollo简介
我们选择在这个十年里去月球做其他的事情,
不是因为他们很容易,而是因为他们很努力。
– John F. Kennedy, 1962
欢迎来到阿波罗GitHub。
阿波罗是一个开放的自动驾驶平台。它是一种高性能的灵活架构,支持完全的自动驾驶能力。
安装
我们强烈建议在预先指定的Docker环境中构建阿波罗项目。有关如何设置docker环境和从源代码构建的说明,请参阅下面的说明。
bash docker/scripts/install_docker.sh
# logout and login to make sure to run docker command without sudo
docker ps # to verify docker works without sudo
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh- 1
- 2
- 3
- 4
- 5
根据源代码构建:
bash apollo.sh build
- 1
- 2
运行
# start Human Machine Interface(HMI)
bash scripts/hmi.sh- 1
- 2
访问
浏览器访问http://localhost:8887,单击Dreamview开始。
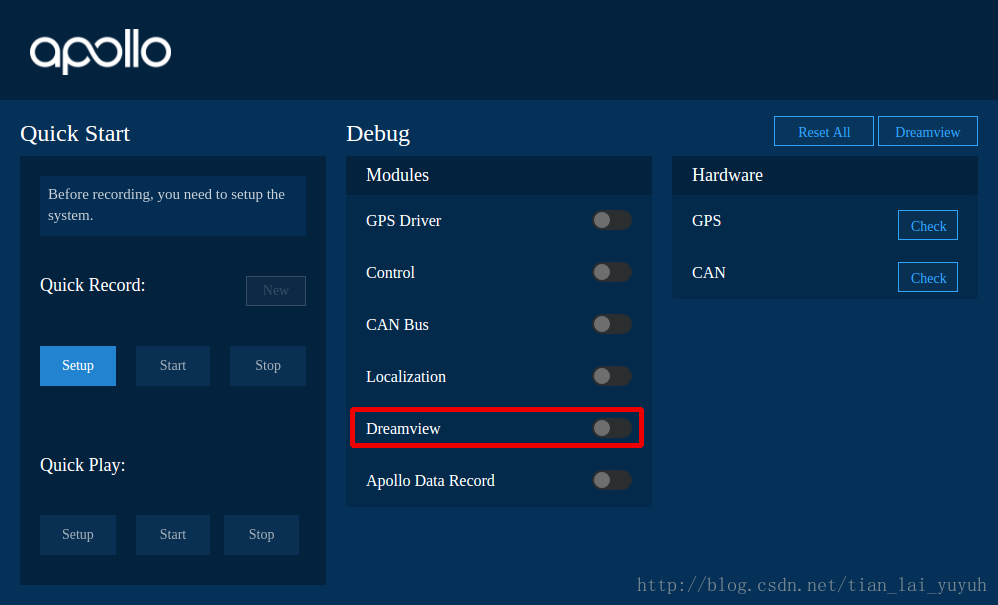
点击右上方的 Dreamview button
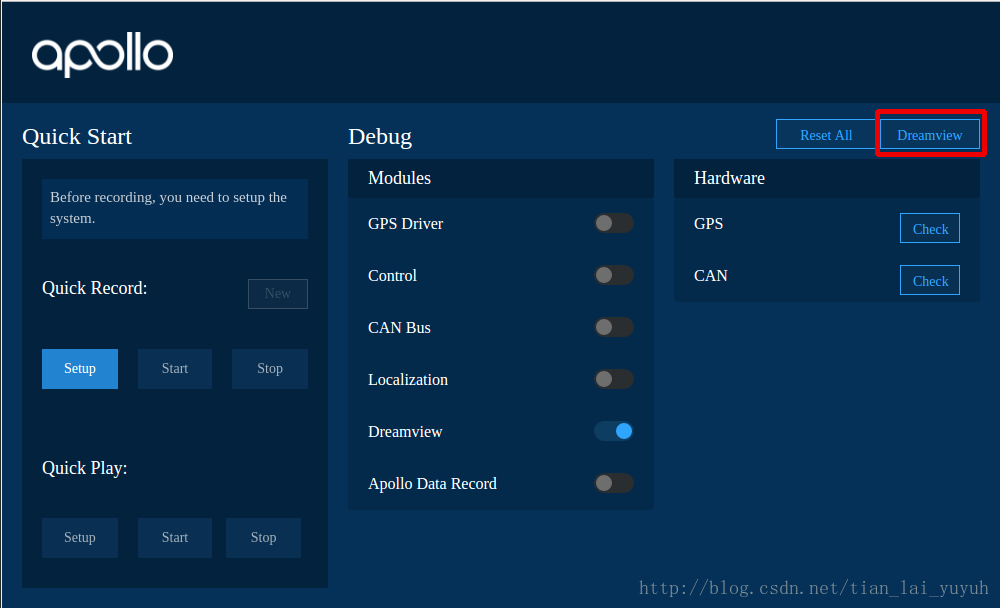
显示页面为:

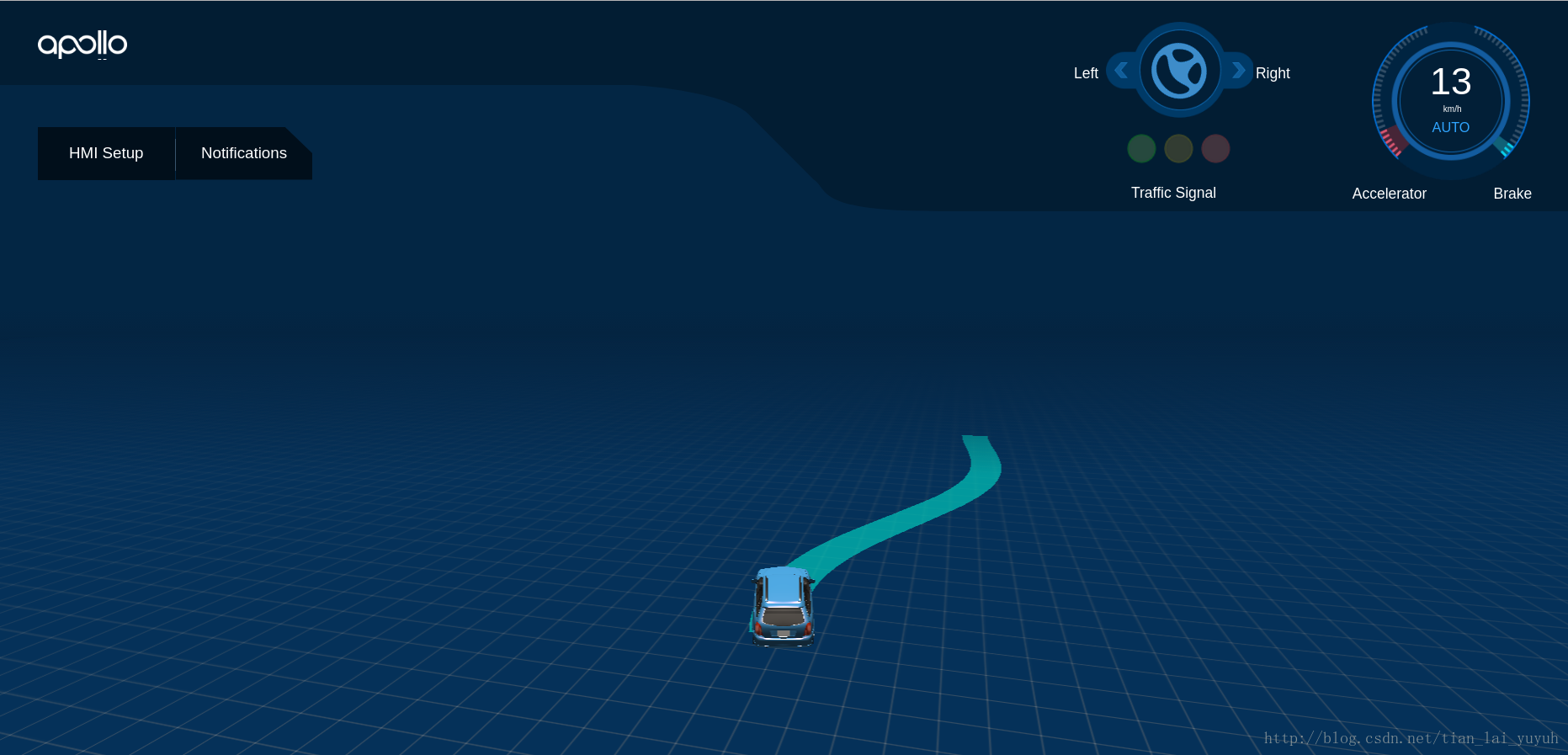
预览demo rosbag:
# in a different terminal inside docker
rosbag play -l ./docs/demo_guide/demo.bag- 1
- 2
现在Dreamview应该显示一辆正在运行的车辆。
希望在Docker容器外构建的高级用户可以参考相应的Docker规范文件(./docker/dev.dockerfile)。
文档
阿波罗文档可以在文档库中被找到。














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









