









Reference
Pipeline
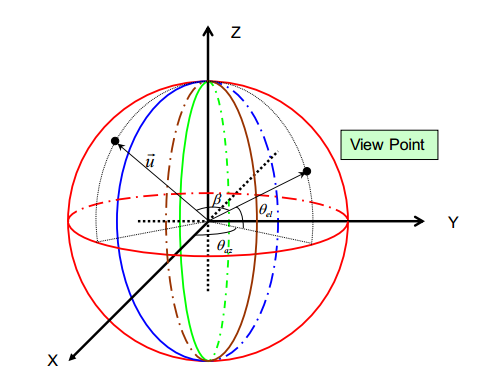
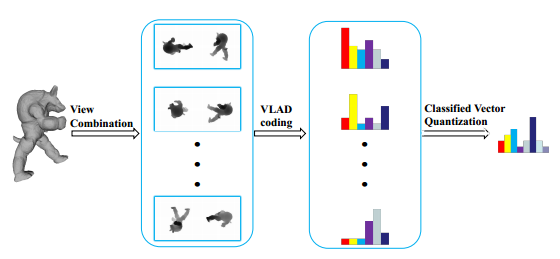
- Pose normalization–>Projection–>Multi-view Matching
- 一句话表述,将3D shape matching问题转化为其投影集合之间的距离计算的问题,主要考虑将存在空间位置关系的投影集合转化为一个具有旋转不变性的单一向量表示。从view pair的夹角出发,利用VLAD对view pair进行第一次coding(每个view是由dense SIFT组成),第二次coding则是将所有view pair根据其夹角分为L个bin,对每个bin分别进行kmeans聚类得到M个visual_word, 利用soft assigned VQ进行coding,这样就形成了L*M的维度的表示,在计算两个向量之间的欧式距离。














 168
168











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









