






装备前轴线控转向系统和轮毂电机驱动系统的电动汽车可实现四轮独立驱/制动、前轴线控转向,对应的控制自由度主要包括四个驱动电机的转矩输出(与四个车轮的纵向力对应)和前轮转角,通过对这些变量进行合理的协调与控制,可以提高车辆的稳定性、动力性和安全性。通过分布式驱动车辆轨迹跟踪与纵横向运动控制,旨在使车辆平稳、准确地跟踪期望轨迹和期望速度。Cui_fou
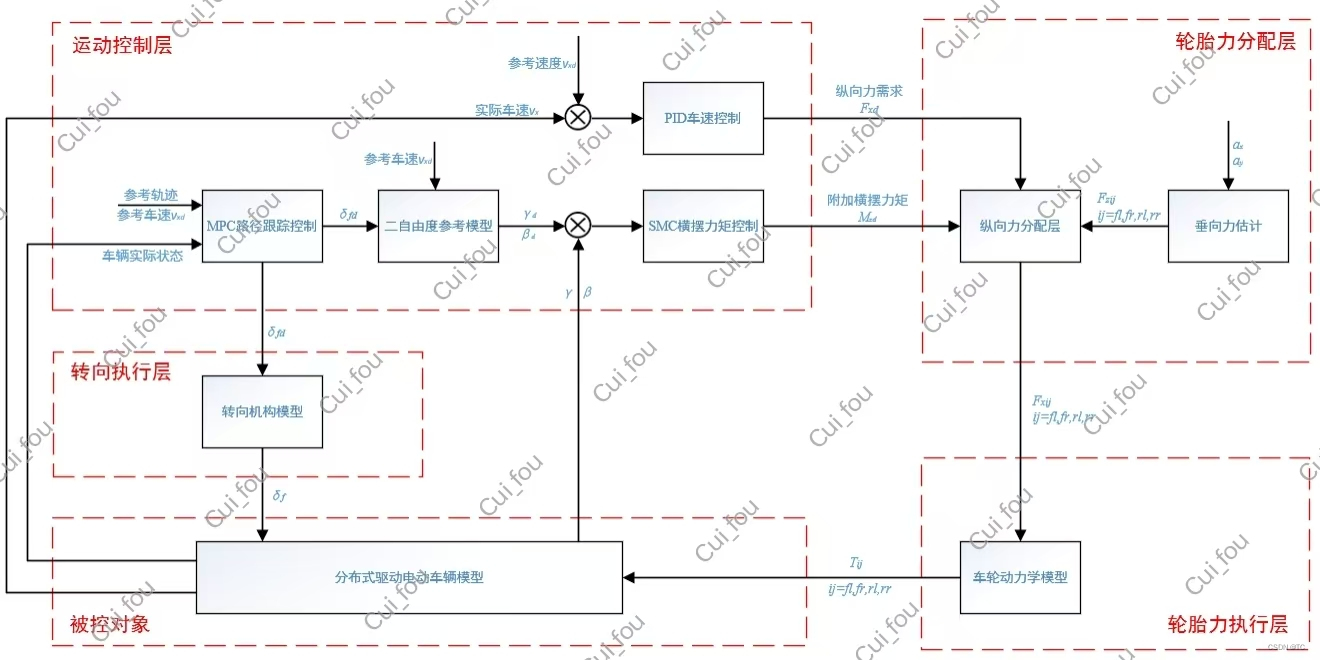
控制总体架构包括运动控制层、轮胎力分配层、执行层和被控对象。上层运动控制层需要解决的主要问题是:根据车辆的参考运动状态(包括参考轨迹和参考速度等)和实际运动状态,得到控制车辆跟踪期望运动状态所需的虚拟控制量。路径跟踪控制器采用模型预测控制,根据参考轨迹、参考车速和车辆实际状态得到期望的前轮转角;参考模型为车辆二自由度模型,根据参考车速和参考前轮转角,计算得到车辆期望横摆角速度和期望质心侧偏角;附加横摆力矩控制器采用滑模控制算法,计算得到维持车辆稳定行驶所需的附加横摆力矩;车速控制器采用PID控制,计算维持车辆动力性所需的期望纵向合力。期望附加横摆力矩和纵向合力作为虚拟控制量输入到轮胎力控制分配层,利用二次规划方法进行轮胎力求解,计算得到轮胎纵向力传输到轮胎力执行器,通过转矩平衡方程转化为四轮转矩输出,由转向执行层输出的车辆前轮转角和由轮胎力执行层输出的四轮驱动转矩共同作用控制车辆跟踪期望轨迹和期望速度。Cui_fou
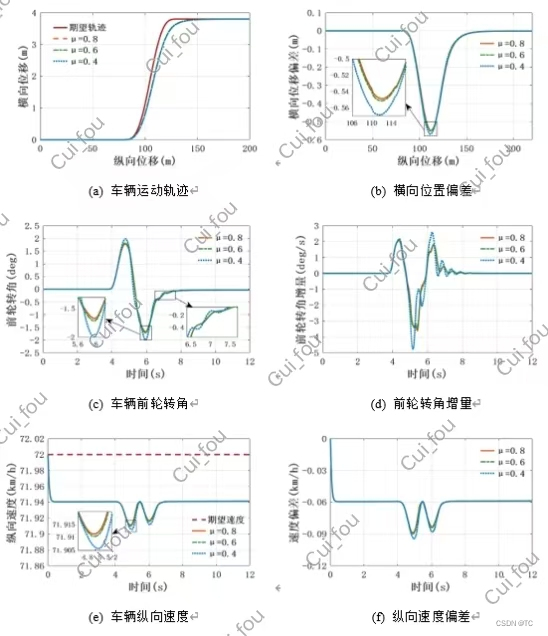
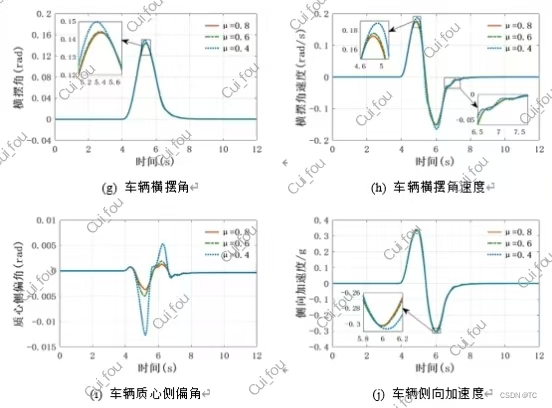
可采用不同的仿真工况设置对控制系统进行验证,如相同速度下路面附着系数不同,验证控制策略对路面附着条件的鲁棒性;相同路面附着系数下速度不同,验证控制策略对速度的鲁棒性。Cui_fou
另外在控制系统中设置了一种对比控制器,可以用作对比。Cui_fou
程序包括carsim的cpar文件以及simulink文件夹。Cui_fou
举例:相同速度下不同路面附着系数验证。Cui_fou
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









