




聊一聊
这是一款含图像漂白、校正等强大功能的软件。
软件功能强大,对电脑硬件要求也很苛刻。
Windows10 1809以下版本,非64位系统。
都不支持该软件。
软件介绍
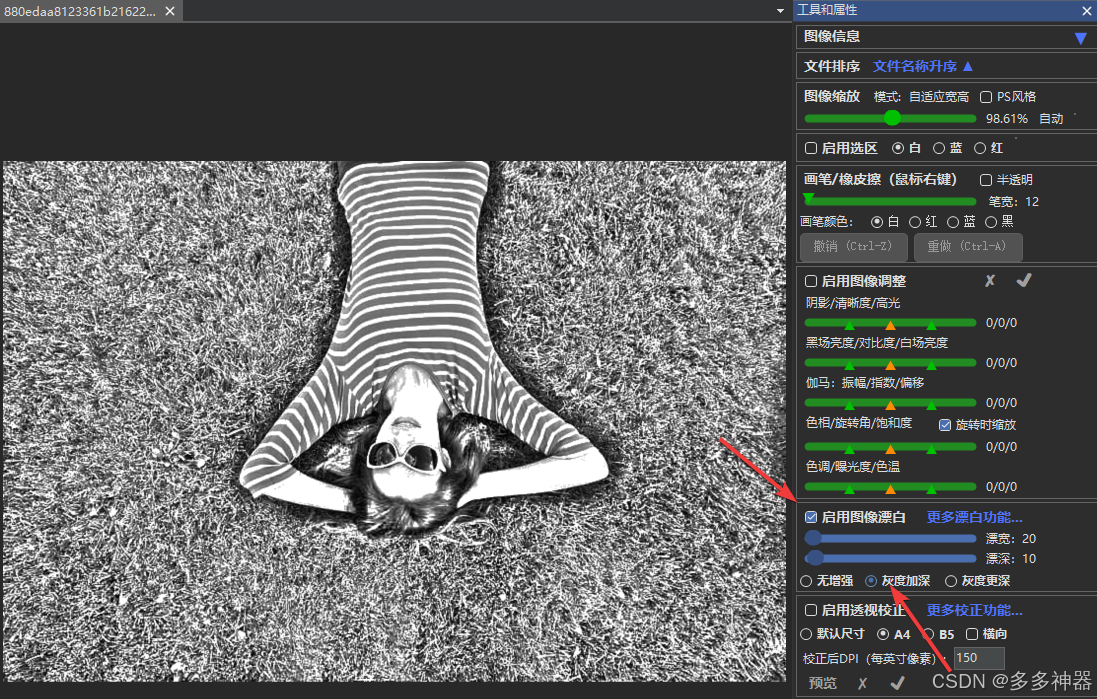
图像漂白工具

(图片来自网络)
这是一张彩色图片,软件可以去除图片颜色,让图片变成黑白图像,打印省墨。
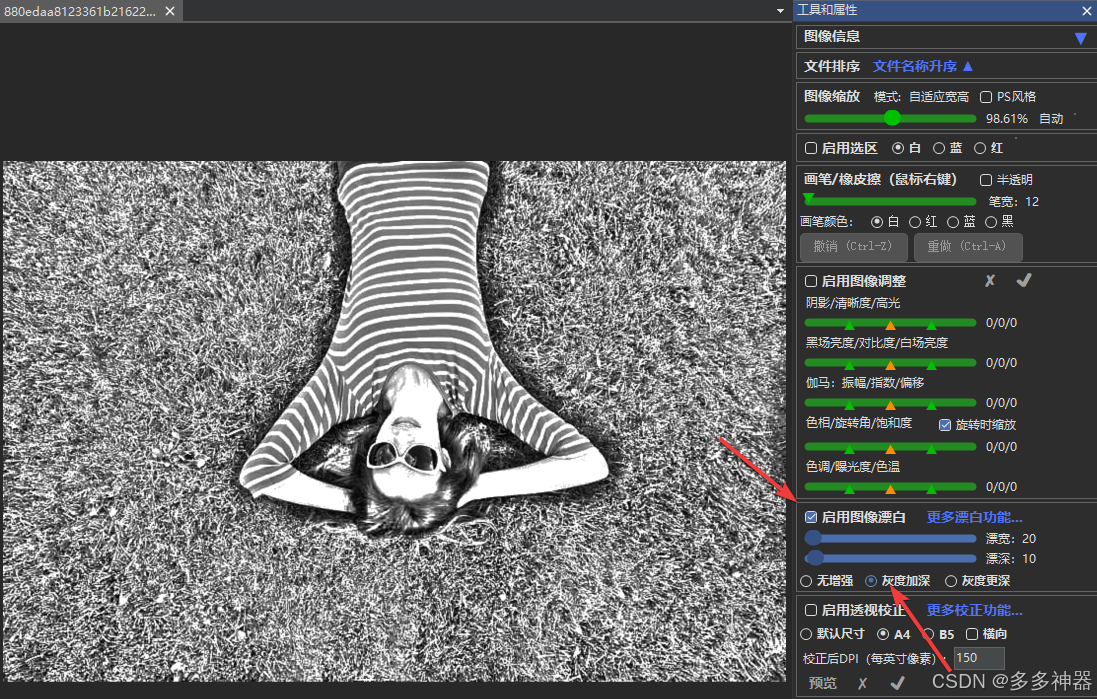
这里点击启用图像漂白,可以设置参数。
调整至满意的效果为止。
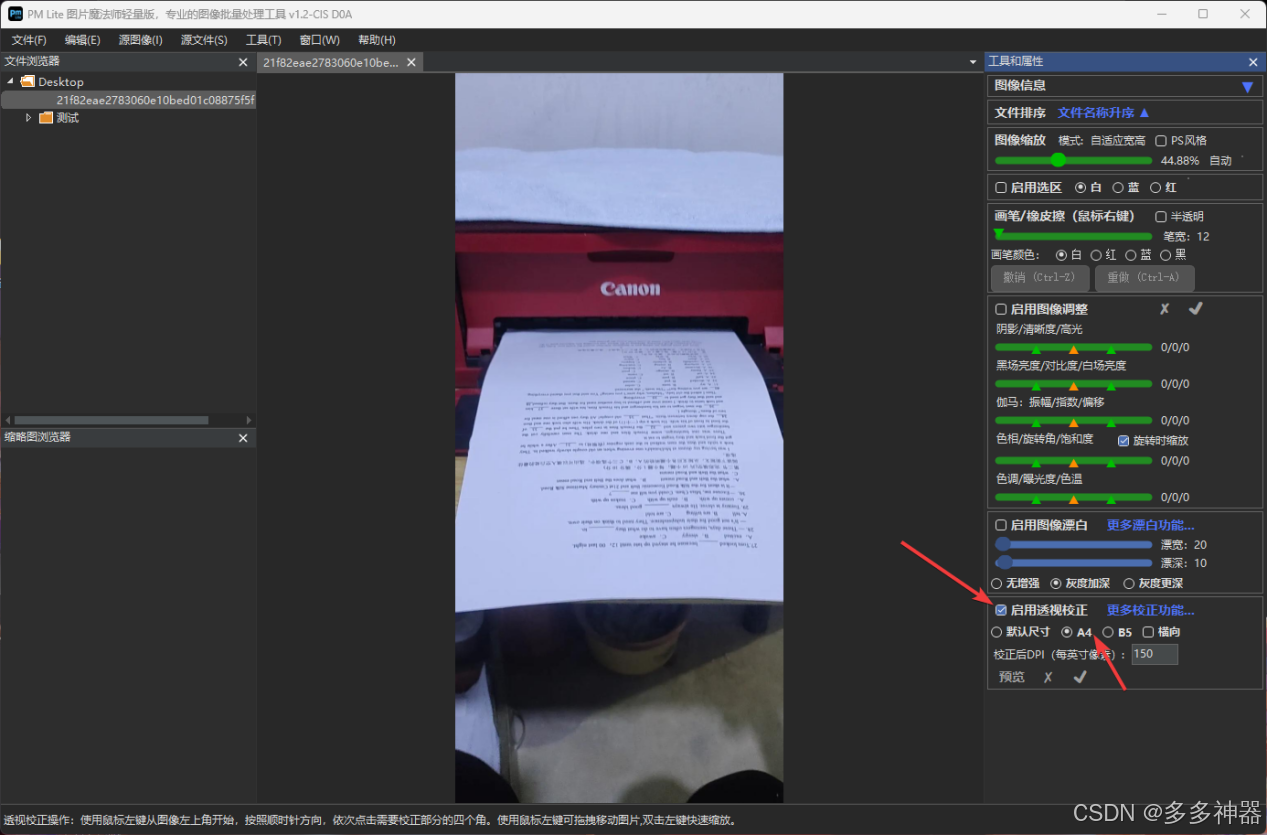
有些时候没有扫描机器,电子版都是手机拍照。
手机拍出来的效果怎么都有些歪。
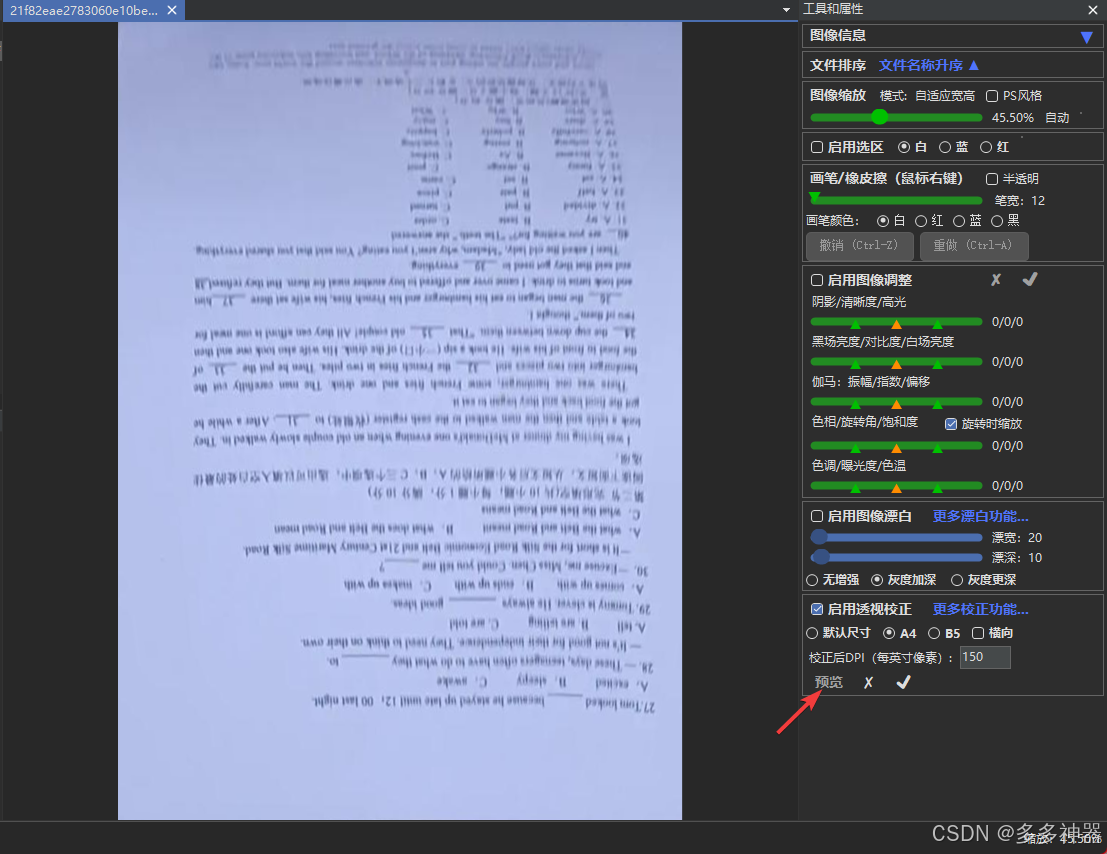
软件有校正功能。可以通过鼠标左键进行四点透视校正,将图像有效区域校正为默认尺寸/A4/B5。
软件还支持无损优化图像、减少图像文件大小、支持鼠标右键画笔/橡皮擦功能,可无限撤销重做。
支持半透明画笔和光标指示,不遮盖图像。
支持鼠标移动查看像素颜色值的功能。
支持图像元数据查看等等功能。
链接:https://pan.quark.cn/s/5d1a1f95065a
提取码:xuv5
















 218
218

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









