







1、产品特点:
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:
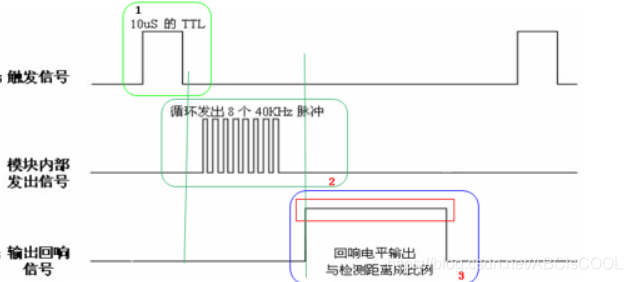
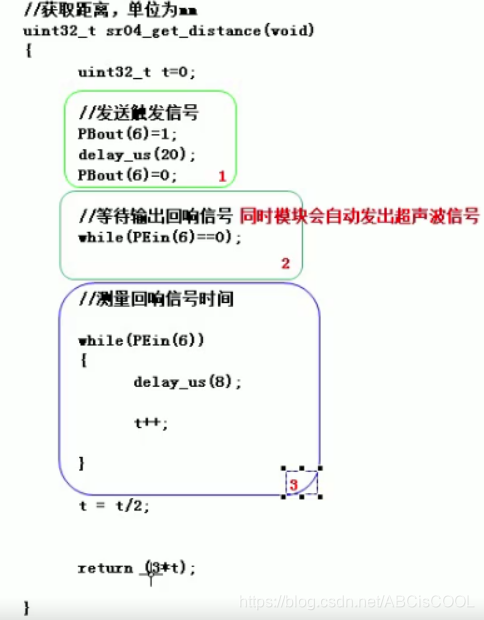
(1)采用IO 口 TRIG触发测距,给最少10us的高电平信号。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;(可以简单认为是高电平)
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
注:1、此模块不宜带电连接,若要带电连接,则先让模块的GND端先连接,否则会影响模块的正常工作。
2、测距时,被测物体的面积不少于0.5平方米且平面尽量要求平整,否则影响测量的结果
时序图如下
公式转换原理:
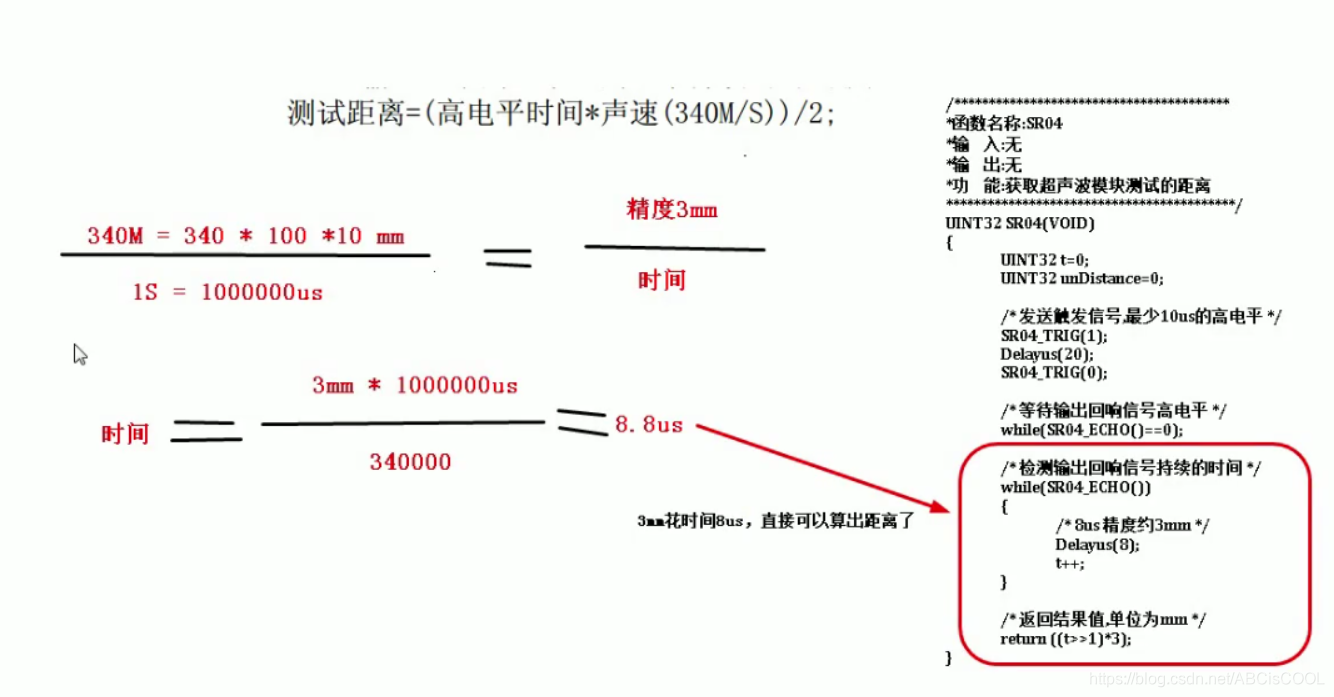
为什么最后是t3呢?
答:因为t/2后是单程的时间,路程=时间速度=t*3mm/s=最终的数值(mm)
拓展:
pwm控制蜂鸣器占空比,下面是例子
#include "stm32f4xx.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_usart.h"
#include "sys.h"
#include "stdio.h"
static GPIO_InitTypeDef GPIO_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure;
static EXTI_InitTypeDef EXTI_InitStructure;
static TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
static TIM_OCInitTypeDef TIM_OCInitStructure;
static uint32_t g_freq=100,g_duty=50,g_cmp=0;
//重定义fputc函数
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
return ch;
}
void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD =SystemCoreClock/8/1000000*nus; //时间加载
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //使能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
void delay_ms(uint16_t nms)
{
uint32_t temp;
SysTick->LOAD=SystemCoreClock/8/1000*nms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
void LED_Init(void)
{
//使能GPIOE,GPIOF时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOF, ENABLE);
//GPIOF9,F10初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //LED0和LED1对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式,
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOF,把配置的数据写入寄存器
//GPIOE13,PE14初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14; //LED2和LED3对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE,把配置的数据写入寄存器
GPIO_SetBits(GPIOF,GPIO_Pin_9 | GPIO_Pin_10); //GPIOF9,PF10设置高,灯灭
GPIO_SetBits 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 754
754











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









