






高端键盘对性能和体验的极致追求不断推动按键技术革新,发展出磁轴、光轴等新型按键。其中,磁轴按键用键内磁体和霍尔传感器取代传统机械按键的金属触点,不仅响应更快,触发和复位行程可调,还支持Rapid Trigger、二段触发和划键区定义响应规则。上述优点使磁轴键盘在FPS和节奏类音游中更具优势,正逐渐成为高端电竞市场的新宠。
方案概述
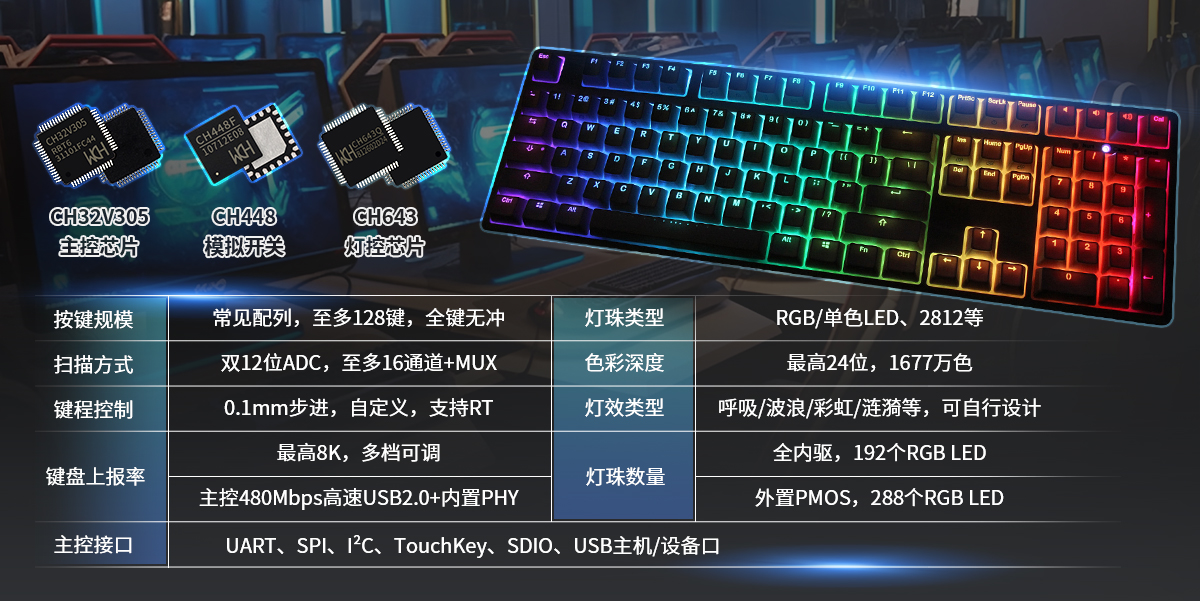
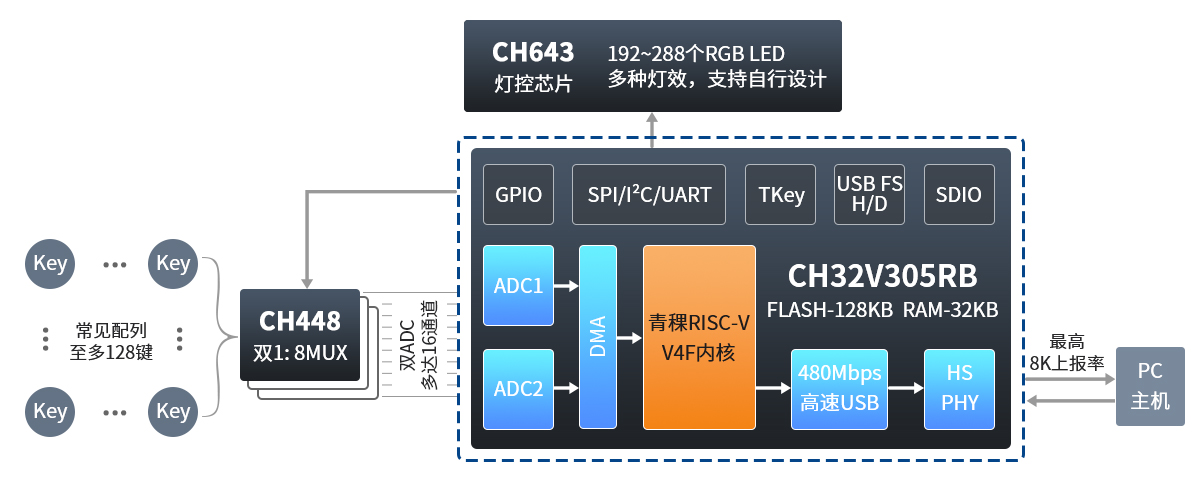
本方案基于沁恒CH32V305RB高速USB MCU、CH448多路复用器和CH643灯效控制芯片。核心器件一站配齐,无需磨合,为客户省去繁琐的芯片选型和兼容性测试环节。方案支持最高8K上报率,全键无冲,键程灵敏度高达0.1mm。
主控CH32V305针对磁轴键盘集成16通道双ADC,按键扫描效率是同条件单ADC方案的两倍。青稞RISC-V V4F内核的VTF技术可有效提升中断响应速度,配合144MHz高主频,击键响应快速敏捷。片上480Mbps USB2.0高速接口内置自研PHY,支持8K上报率且无需外接高速收发器。从按键捕获、算法执行到键值上传,全面覆盖高端键盘的关键环节,通过极致的交互体验充分满足专业用户的品质需求。
CH448是双1:8多路复用器,通道切换和信号建立速度满足8K上报率高端键盘每125us获取所有按键状态的严苛时间限制。单芯片管理多达16个按键,以80键键盘为例,使用CH32V305的10个外部通道、5颗CH448即可满足需求。
CH643灯控芯片内置LEDPWM和PIOC两套灯控机制。LEDPWM提供3*16=48路PWM,支持最高24位色深1677万种颜色、至多256级亮度控制,驱动192个RGB灯珠无需外部MOS,如外置PMOS可驱动288个RGB灯珠。PIOC可用于2812等RGB灯珠,支持上千颗灯珠串联。LEDPWM和PIOC可同时工作,构建各类复杂炫酷的灯效组合。
特点总结
应用框图















 909
909

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









