







Outline
1. Introduction
2. Image data structure in OpenCV
3. Basic operations for images
4. Working with videos
5. References and resources
1. Introduction
General description
Open source computer vision library in C/C++.
Optimized and intended for real-time applications.
OS/hardware/window-manager independent.
Generic image/video loading, saving, and acquisition.
Both low and high level API.
Provides interface to Intel's Integrated Performance
Primitives (IPP) with processor specific optimization
(Intel processors).
1. Introduction
Features:
Image data manipulation (allocation, release, copying, setting, conversion).
Image and video I/O (file and camera based input, image/video file output).
Matrix and vector manipulation and linear algebra routines.
Various dynamic data structures (lists, queues, sets, trees, graphs).
Basic image processing (filtering, edge detection, corner detection, sampling
and interpolation, color conversion, morphological operations, histograms,
image pyramids).
Structural analysis (connected components, contour processing, distance
transform, various moments, template matching, Hough transform, polygonal
approximation, line fitting, ellipse fitting, Delaunay triangulation).
Camera calibration (finding and tracking calibration patterns, calibration,
fundamental matrix estimation, homography estimation, stereo correspondence).
Motion analysis (optical flow, motion segmentation, tracking).
Object recognition (eigen-methods, HMM).
Basic GUI (display image/video, keyboard and mouse handling, scroll-bars).
Image labeling (line, conic, polygon, text drawing).
1. Introduction
OpenCV modules:
cv - Main OpenCV functions.
cvaux - Auxiliary (experimental) OpenCV
functions.
cxcore - Data structures and linear algebra
support.
highgui - GUI functions.
2. Image data structure in OpenCV
Load and display an image in OpenCV:
#include "cv.h" //main OpenCV functions
#include <cxcore.h>
#include "highgui.h" //OpenCV GUI functions
#include <stdio.h>
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main()
{
/* declare a new IplImage pointer, the basic
image data structure in OpenCV */
IplImage* newImg;
/* load an image named "apple.bmp", 1 means
this is a color image */
newImg = cvLoadImage("apple.bmp",1);
//create a new window
cvNamedWindow("Window", 1);
//display the image in the window
cvShowImage("Window", newImg);
//wait for key to close the window
cvWaitKey(0);
cvDestroyWindow( "Window" ); //destroy the window
cvReleaseImage( &newImg ); //release the memory for the image
return 0;
}
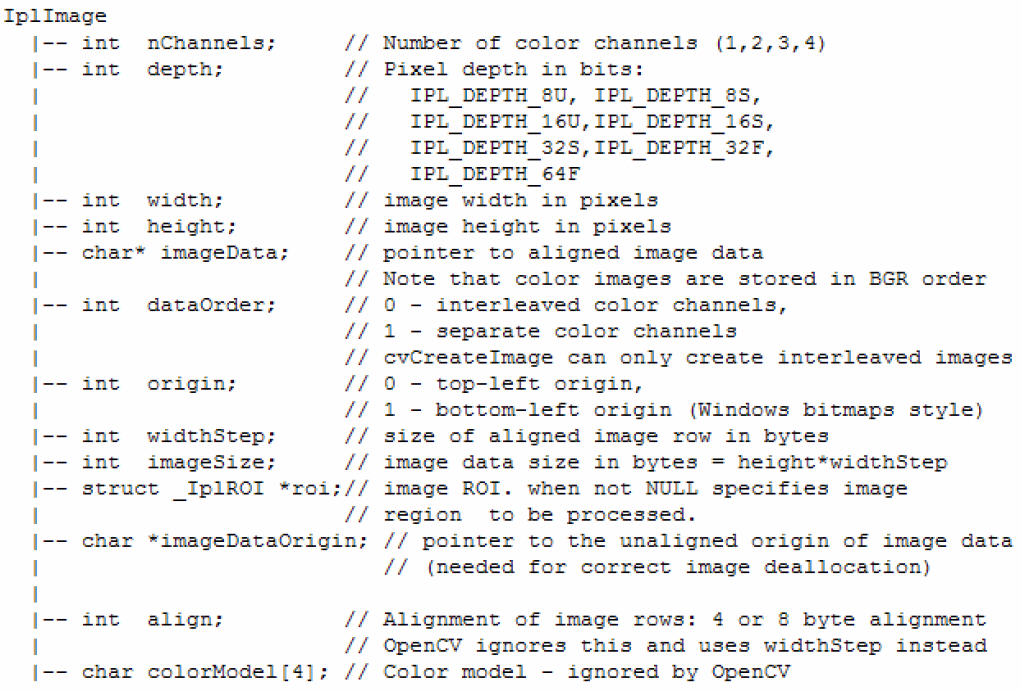
2. Image data structure in OpenCV
IplImage is the basic image data structure in OpenCV
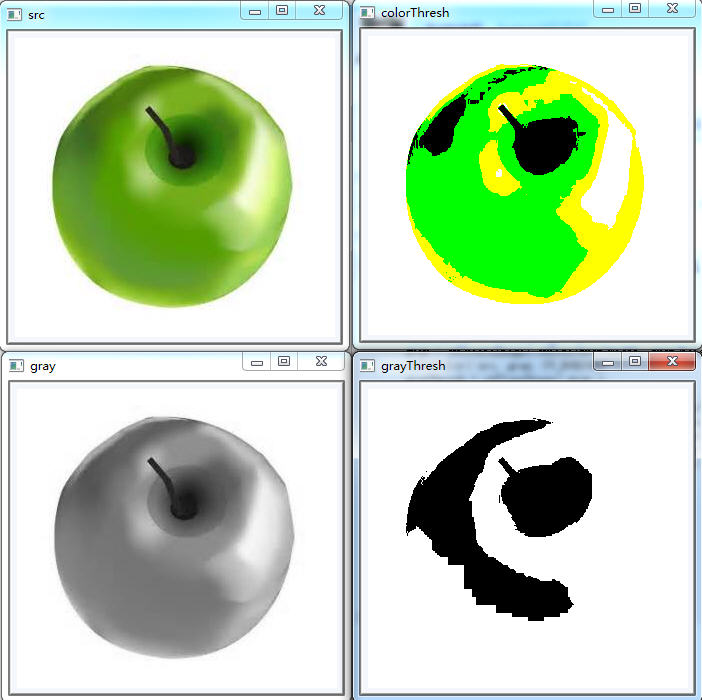
3. Basic operations for images
Threshold
#include "cv.h"
#include "highgui.h"
#include "math.h"
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main()
{
IplImage* src;
IplImage* colorThresh;
IplImage* gray;
IplImage* grayThresh;
int threshold = 120, maxValue = 255;
int thresholdType = CV_THRESH_BINARY;
src = cvLoadImage("apple.bmp", 1);
colorThresh = cvCloneImage( src );
gray = cvCreateImage( cvSize(src->width, src->height), IPL_DEPTH_8U, 1 );
cvCvtColor( src, gray, CV_BGR2GRAY );
grayThresh = cvCloneImage( gray );
cvNamedWindow( "src", 1 ); cvShowImage( "src", src );
cvNamedWindow( "gray", 1 ); cvShowImage( "gray", gray );
cvThreshold(src, colorThresh, threshold, maxValue, thresholdType);
cvThreshold(gray, grayThresh, threshold, maxValue, thresholdType);
cvNamedWindow( "colorThresh", 1 ); cvShowImage( "colorThresh", colorThresh );
cvNamedWindow( "grayThresh", 1 ); cvShowImage( "grayThresh", grayThresh );
cvWaitKey(0);
cvDestroyWindow( "src" );
cvDestroyWindow( "colorThresh" );
cvDestroyWindow( "gray" );
cvDestroyWindow( "grayThresh" );
cvReleaseImage( &src );
cvReleaseImage( &colorThresh );
cvReleaseImage( &gray );
cvReleaseImage( &grayThresh );
return 0;
}
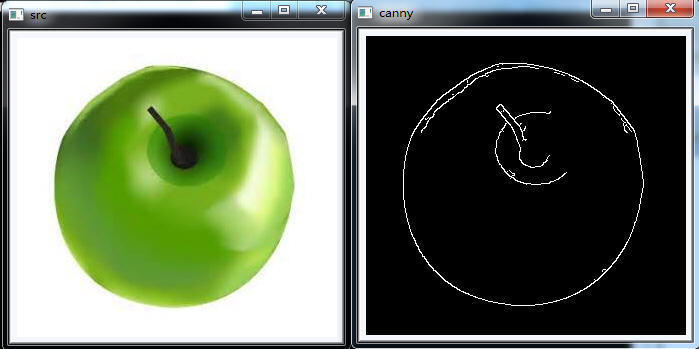
3. Basic operations for images
Canny edge detection
#include "cv.h"
#include "highgui.h"
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main()
{
IplImage* newImg; // original image
IplImage* grayImg; // gray image for the conversion of the original image
IplImage* cannyImg; // gray image for the canny edge detection
//load original image
newImg = cvLoadImage("apple.bmp",1);
//create a single channel 1 byte image (i.e. gray-level image)
grayImg = cvCreateImage( cvSize(newImg->width, newImg->height), IPL_DEPTH_8U, 1 );
//convert original color image (3 channel rgb color image) to gray-level image
cvCvtColor( newImg, grayImg, CV_BGR2GRAY );
cannyImg = cvCreateImage(cvGetSize(newImg), IPL_DEPTH_8U, 1);
// canny edge detection
cvCanny(grayImg, cannyImg, 50, 150, 3);
cvNamedWindow("src", 1);
cvNamedWindow("canny",1);
cvShowImage( "src", newImg );
cvShowImage( "canny", cannyImg );
cvWaitKey(0);
cvDestroyWindow( "src" );
cvDestroyWindow( "canny" );
cvReleaseImage( &newImg );
cvReleaseImage( &grayImg );
cvReleaseImage( &cannyImg );
return 0;
}
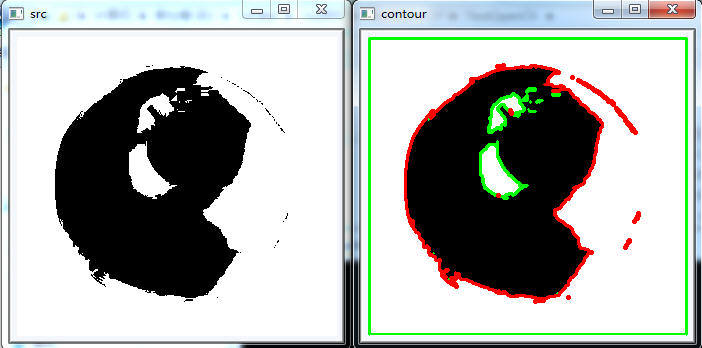
3. Basic operations for images
Contour detection
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main()
{
IplImage* newImg = NULL;
IplImage* grayImg = NULL;
IplImage* contourImg = NULL;
//parameters for the contour detection
CvMemStorage * storage = cvCreateMemStorage(0);
CvSeq * contour = 0;
int mode = CV_RETR_EXTERNAL;
mode = CV_RETR_CCOMP; //detect both outside and inside contour
cvNamedWindow("src", 1);
cvNamedWindow("contour",1);
//load original image
newImg = cvLoadImage("applebw.bmp",1);
//create a single channel 1 byte image (i.e. gray-level image)
grayImg = cvCreateImage( cvSize(newImg->width, newImg->height), IPL_DEPTH_8U, 1 );
//convert original color image (3 channel rgb color image) to gray-level image
cvCvtColor( newImg, grayImg, CV_BGR2GRAY );
cvShowImage( "src", newImg );
//make a copy of the original image to draw the detected contour
contourImg = cvCreateImage(cvGetSize(newImg), IPL_DEPTH_8U, 3);
contourImg=cvCloneImage( newImg );
//find the contour
cvFindContours(grayImg, storage, &contour, sizeof(CvContour), mode, CV_CHAIN_APPROX_SIMPLE, cvPoint(0,0));
//draw the contour
cvDrawContours(contourImg, contour, CV_RGB(0, 255, 0), CV_RGB(255, 0, 0), 2, 2, 8);
cvShowImage( "contour", contourImg );
cvWaitKey(0);
cvDestroyWindow( "src" ); cvDestroyWindow( "contour" );
cvReleaseImage( &newImg ); cvReleaseImage( &grayImg ); cvReleaseImage( &contourImg );
cvReleaseMemStorage(&storage);
return 0;
}
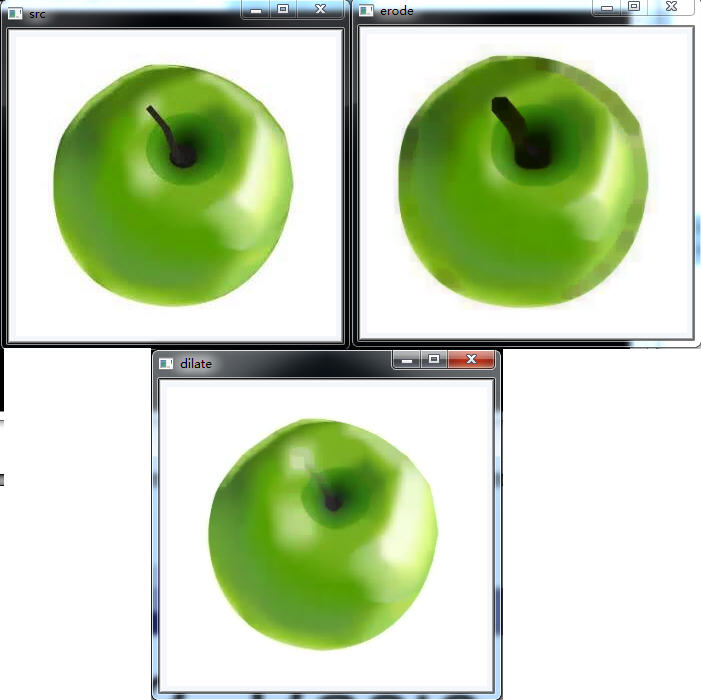
3. Basic operations for images
Dilate/Erode
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main()
{
IplImage* newImg = NULL;
IplImage* dilateImg = NULL;
IplImage* erodeImg = NULL;
cvNamedWindow("src", 1);
cvNamedWindow("dilate",1);
cvNamedWindow("erode",1);
//load original image
newImg = cvLoadImage("apple.bmp",1);
cvShowImage( "src", newImg );
//make a copy of the original image
dilateImg=cvCloneImage( newImg );
erodeImg=cvCloneImage( newImg );
//dilate image
cvDilate(newImg,dilateImg,NULL,4);
//erode image
cvErode(newImg,erodeImg,NULL,4);
cvShowImage( "dilate", dilateImg );
cvShowImage( "erode", erodeImg );
cvWaitKey(0);
cvDestroyWindow( "src" ); cvDestroyWindow( "dilate" ); cvDestroyWindow( "erode" );
cvReleaseImage( &newImg ); cvReleaseImage( &dilateImg ); cvReleaseImage( &erodeImg );
return 0;
}
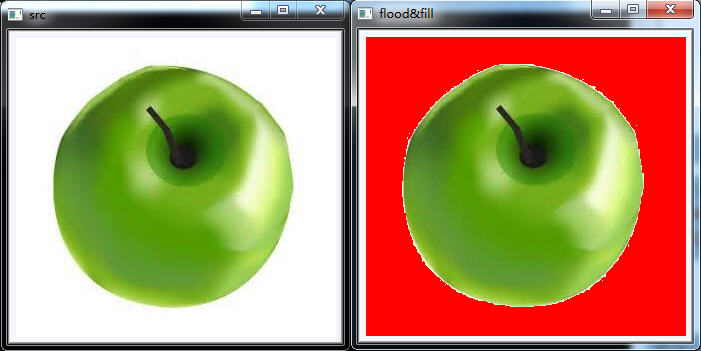
3. Basic operations for images
Flood and Fill
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main()
{
IplImage* newImg = NULL;
IplImage* ffImg = NULL;
//flood and fill parameters
int lo_diff, up_diff; //the low and up flood randge which can be adjusted
CvConnectedComp comp;
CvPoint floodSeed; //the original pixel where the flood begins
CvScalar floodColor;
lo_diff=8;
up_diff=8;
floodColor = CV_RGB( 255, 0, 0 ); //set the flood color to red
cvNamedWindow("src", 1);
cvNamedWindow("flood&fill",1);
//load original image
newImg = cvLoadImage("apple.bmp",1);
cvShowImage( "src", newImg );
//make a copy of the original image
ffImg=cvCloneImage( newImg );
floodSeed=cvPoint(60,60); //flooding start from pixel(60, 60)
//Flood and Fill from pixel(60, 60) with color red and the flood range of (-8, +8)
cvFloodFill( ffImg, floodSeed, floodColor, CV_RGB( lo_diff, lo_diff, lo_diff ),
CV_RGB( up_diff, up_diff, up_diff ), &comp, 8, NULL);
cvShowImage( "flood&fill", ffImg );
cvWaitKey(0);
cvDestroyWindow( "src" ); cvDestroyWindow( "flood&fill" );
cvReleaseImage( &newImg ); cvReleaseImage( &ffImg );
return 0;
}
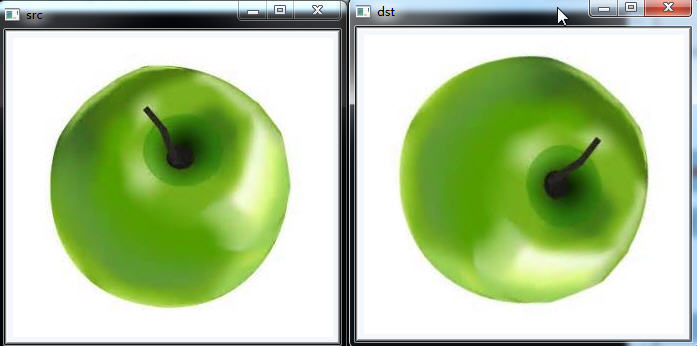
3. Basic operations for images
Rotate and Scale
#include "cv.h"
#include "highgui.h"
#include "math.h"
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "highgui.lib")
int main()
{
IplImage* src;
IplImage* dst;
int delta;
int angle;
src = cvLoadImage("apple.bmp", 1);
dst = cvCloneImage( src );
delta = 1; angle = 0;
cvNamedWindow( "src", 1 );
cvShowImage( "src", src );
for(;;)
{
float m[6];
double factor = (cos(angle*CV_PI/180.) + 1.1)*3;
CvMat M = cvMat( 2, 3, CV_32F, m );
int w = src->width;
int h = src->height;
m[0] = (float)(factor*cos(-angle*2*CV_PI/180.));
m[1] = (float)(factor*sin(-angle*2*CV_PI/180.));
m[2] = w*0.5f;
m[3] = -m[1];
m[4] = m[0];
m[5] = h*0.5f;
// cvGetQuadrangleSubPix( src, dst, &M, 1, cvScalarAll(0));
cvGetQuadrangleSubPix( src, dst, &M);
cvNamedWindow( "dst", 1 ); cvShowImage( "dst", dst );
if( cvWaitKey(5) == 27 )
break;
angle = (angle + delta) % 360;
}
return 0;
}
4. Working with videos
Video capture from a file:
CvCapture* cvCaptureFromFile( const char* filename );
Video capture from a camera:
CvCapture* cvCaptureFromCAM( int index );
example:
// capture from video device #0
CvCapture* capture = cvCaptureFromCAM(0); Grab a frame:
cvGrabFrame( CvCapture* capture );
Get the image grabbed with cvGrabFrame:
cvRetrieveFrame( CvCapture* capture );
example:
IplImage* img = 0;
if(!cvGrabFrame(capture)){ // capture a frame
printf("Could not grab a frame\n\7");
exit(0); }
//retrieve the captured frame
img=cvRetrieveFrame(capture); cvReleaseCapture(&capture);
For a better understanding of video processing with OpenCV, refer to
the face detection example under the dir: C:\Program Files\OpenCV\samples\c\facedetect.c
5. References and resources
http://www.intel.com/technology/computing/opencv/index.htm http://www.intel.com/technology/computing/opencv/index.htm
OpenCV official webpage.
http://opencvlibrary.sourceforge.net/ http://opencvlibrary.sourceforge.net/
OpenCV documentation and FAQs.
http://tech.groups.yahoo.com/group/OpenCV/ OpenCV documentation and FAQs.
OpenCV forum at Yahoo Groups.
http://www.site.uottawa.ca/~laganier/tutorial/opencv+directshow/cvis http://www.site.uottawa.ca/~laganier/tutorial/opencv+directshow/cvis
ion.htm
This is a good walkthrough for OpenCV and the Microsoft
DirectShow technology by Prof. Robert Laganière of university of
Ottawa. The configuration of OpenCV for MS .Net is also included.
http://ai.stanford.edu/~dstavens/cs223b/stavens_opencv_optical_flo http://ai.stanford.edu/~dstavens/cs223b/stavens_opencv_optical_flo
w.pdf
This is another OpenCV introduction focused on Optical Flow, the
installation of OpenCV is also included.
About myself
I am a Ph.D. candidate at the DiscoverLab, School of Information
Technology and Engineering, University of Ottawa. My general
research interests include image processing and computer vision.
My current research topic is focused on real-time vision-based hand
gesture recognition for Human Computer Interface (HCI).
For more information about me, please refer to my webpage:
http://www.discover.uottawa.ca/~qchen















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









