










文章参考:
环境搭建:
1. 安装anaconda;
2. 在anaconda中创建一个新的环境 (比如obj);
3. 在obj环境中安装所需要的各种模块;
4. 下载maskrcnn源码;
5. 调试遇到的坑;
实现步骤:
1. 安装anaconda: 下载对应版本的linux Anaconda;然后 在linux终端输入:
bash Anaconda3-2019.03-Linux-x86_64.shAnaconda下载链接:https://pan.baidu.com/s/1XB_agMgj3PBo8iJgrkxO9g
提取码:0b7s
2. 在anaconda中创建一个新的环境 (比如obj):
# obj是新的环境名称;
# python=3.6 代表该环境下安装的python版本是3.6;
# 坑: 必须要安装python在新的环境下,否则创建新的环境不能用python运行
conda create -n obj python=3.6
source activate obj # 激活这个环境
'''
其它一些conda常用指令:
1)conda list 查看安装了哪些包。
2)conda env list 或 conda info -e 查看当前存在哪些虚拟环境
3)conda update conda 检查更新当前conda
4)conda --version 查询conda版本
5)conda -h 查询conda的命令使用
6)source deactivate 退出当前环境
7)conda remove -n your_env_name(虚拟环境名称) --all 删除虚拟环境
8)conda remove --name your_env_name package_name 删除虚拟环境中的包
'''
3. 在obj环境中安装所需要的各种模块:
conda install scipy
conda install matplotlib
conda install cython
conda install scikit-learn
conda install jupyter notebook
conda install ipython
conda install pandas
conda install pytorch torchvision cudatoolkit=9.0 -c pytorch
4. 下载maskrcnn源码:
(1)安装pycocotools:
git clone https://github.com/cocodataset/cocoapi.git
cd cocoapi/PythonAPI
python setup.py build_ext install
(2)安装vision库,在github下面的v0.3.0分支下:
git clone https://github.com/pytorch/vision.git
cd vision
git checkout v0.3.0
cp references/detection/utils.py ../ # references 是v0.3.0里面的refernces
cp references/detection/transforms.py ../
cp references/detection/coco_eval.py ../
cp references/detection/engine.py ../
cp references/detection/coco_utils.py ../(3)自己写下train & evalution 代码:需要把路径改成你自己的路径。
import os
import numpy as np
import torch
from PIL import Image
import torchvision
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
from torchvision.models.detection.mask_rcnn import MaskRCNNPredictor
from engine import train_one_epoch, evaluate
import utils
import transforms as T
class PennFudanDataset(object):
def __init__(self, root, transforms):
self.root = root
self.transforms = transforms
# load all image files, sorting them to
# ensure that they are aligned
# ***********************************"image_pca" 改成自己的图片路径
# ***********************************"mask_pic" 改成自己的mask图片路径
self.imgs = list(sorted(os.listdir(os.path.join(root, "image_pca"))))
self.masks = list(sorted(os.listdir(os.path.join(root, "mask_pic"))))
def __getitem__(self, idx):
# load images ad masks
# ***********************************"image_pca" 改成自己的图片路径
# ***********************************"mask_pic" 改成自己的mask图片路径
img_path = os.path.join(self.root, "image_pca", self.imgs[idx])
mask_path = os.path.join(self.root, "mask_pic", self.masks[idx])
img = Image.open(img_path).convert("RGB")
# note that we haven't converted the mask to RGB,
# because each color corresponds to a different instance
# with 0 being background
mask = Image.open(mask_path)
mask = np.array(mask)
# instances are encoded as different colors
obj_ids = np.unique(mask)
# first id is the background, so remove it
obj_ids = obj_ids[1:]
# split the color-encoded mask into a set
# of binary masks
masks = mask == obj_ids[:, None, None]
# get bounding box coordinates for each mask
num_objs = len(obj_ids)
boxes = []
for i in range(num_objs):
pos = np.where(masks[i])
xmin = np.min(pos[1])
xmax = np.max(pos[1])
ymin = np.min(pos[0])
ymax = np.max(pos[0])
boxes.append([xmin, ymin, xmax, ymax])
boxes = torch.as_tensor(boxes, dtype=torch.float32)
# there is only one class
labels = torch.ones((num_objs,), dtype=torch.int64)
masks = torch.as_tensor(masks, dtype=torch.uint8)
image_id = torch.tensor([idx])
area = (boxes[:, 3] - boxes[:, 1]) * (boxes[:, 2] - boxes[:, 0])
# suppose all instances are not crowd
iscrowd = torch.zeros((num_objs,), dtype=torch.int64)
target = {}
target["boxes"] = boxes
target["labels"] = labels
target["masks"] = masks
target["image_id"] = image_id
target["area"] = area
target["iscrowd"] = iscrowd
if self.transforms is not None:
img, target = self.transforms(img, target)
return img, target
def __len__(self):
return len(self.imgs)
def get_model_instance_segmentation(num_classes):
# load an instance segmentation model pre-trained pre-trained on COCO
model = torchvision.models.detection.maskrcnn_resnet50_fpn(pretrained=True)
# get number of input features for the classifier
in_features = model.roi_heads.box_predictor.cls_score.in_features
# replace the pre-trained head with a new one
model.roi_heads.box_predictor = FastRCNNPredictor(in_features, num_classes)
# now get the number of input features for the mask classifier
in_features_mask = model.roi_heads.mask_predictor.conv5_mask.in_channels
hidden_layer = 256
# and replace the mask predictor with a new one
model.roi_heads.mask_predictor = MaskRCNNPredictor(in_features_mask,
hidden_layer,
num_classes)
return model
def get_transform(train):
transforms = []
transforms.append(T.ToTensor())
if train:
transforms.append(T.RandomHorizontalFlip(0.5))
return T.Compose(transforms)
def main():
# train on the GPU or on the CPU, if a GPU is not available
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
# our dataset has two classes only - background and person
num_classes = 2
# use our dataset and defined transformations
# *********************************"maskrcnn_data"改成你自己的图片路径
dataset = PennFudanDataset('maskrcnn_data', get_transform(train=True))
dataset_test = PennFudanDataset('maskrcnn_data', get_transform(train=False))
# split the dataset in train and test set
indices = torch.randperm(len(dataset)).tolist()
dataset = torch.utils.data.Subset(dataset, indices[:-50])
dataset_test = torch.utils.data.Subset(dataset_test, indices[-50:])
# define training and validation data loaders
data_loader = torch.utils.data.DataLoader(
dataset, batch_size=3, shuffle=True, num_workers=4,
collate_fn=utils.collate_fn)
data_loader_test = torch.utils.data.DataLoader(
dataset_test, batch_size=2, shuffle=False, num_workers=4,
collate_fn=utils.collate_fn)
# get the model using our helper function
model = get_model_instance_segmentation(num_classes)
# move model to the right device
model.to(device)
# construct an optimizer
params = [p for p in model.parameters() if p.requires_grad]
optimizer = torch.optim.SGD(params, lr=0.005,
momentum=0.9, weight_decay=0.0005)
# and a learning rate scheduler
lr_scheduler = torch.optim.lr_scheduler.StepLR(optimizer,
step_size=3,
gamma=0.1)
# let's train it for 10 epochs
num_epochs =20
for epoch in range(num_epochs):
# train for one epoch, printing every 10 iterations
train_one_epoch(model, optimizer, data_loader, device, epoch, print_freq=10)
# update the learning rate
lr_scheduler.step()
# evaluate on the test dataset
evaluate(model, data_loader_test, device=device)
print("That's it!")
if __name__ == "__main__":
main()(4)文件组织形式:
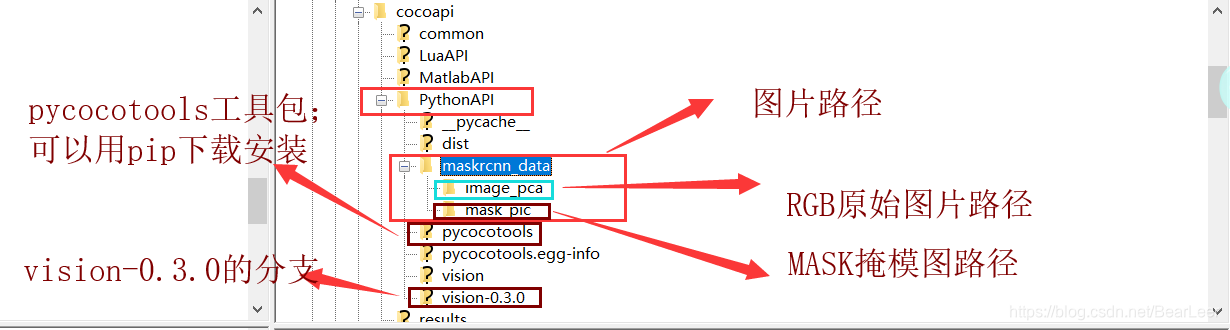
(5) PythonAPI 路径下面有4个Python文件:如果重复,可替换:
链接:https://pan.baidu.com/s/1MMfI3v_UY67cs4eXaH0p6w
提取码:g7sf
5. 调试遇到的坑:
(1)发生AssertionError错误:
AssertionError:
The NVIDIA driver on your system is too old (found version 9000).
Please update your GPU driver by downloading and installing a new
version from the URL: http://www.nvidia.com/Download/index.aspx
Alternatively, go to: https://pytorch.org to install
a PyTorch version that has been compiled with your version
of the CUDA driver.
解决办法:重新安装cuda和torch;原因在于cuda和torch版本不匹配;
conda install pytorch torchvision cuda90 -c pytorch
(2)ModuleNotFoundError:No module named 'pycocotools._mask'
解决办法:没有编译
cd coco/PythonAPI
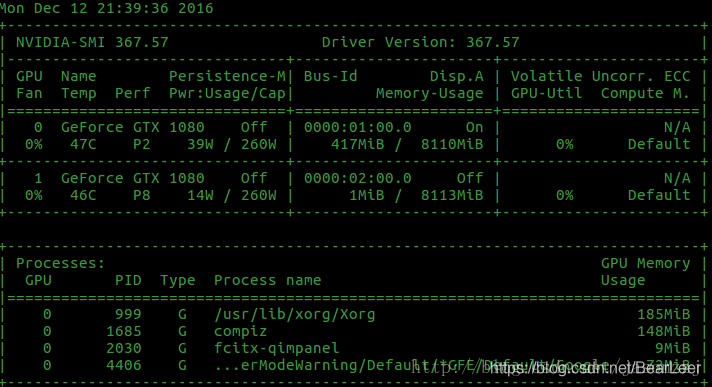
make(3)RuntimeError: out of memory
解决办法:在训练代码的开头出加上:
os.environ['CUDA_VISIBLE_DEVICES']='0, 1' # 0,1 是你的空闲GPU块号查看空闲GPU块号的方法:
nvidia-smi结果如下:其中0号 GPU共8110MB显存,已使用417MB;1号 GPU共8113MB,共使用1MB;故0号和1号GPU均可使用;














 5946
5946











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









