







针孔相机模型
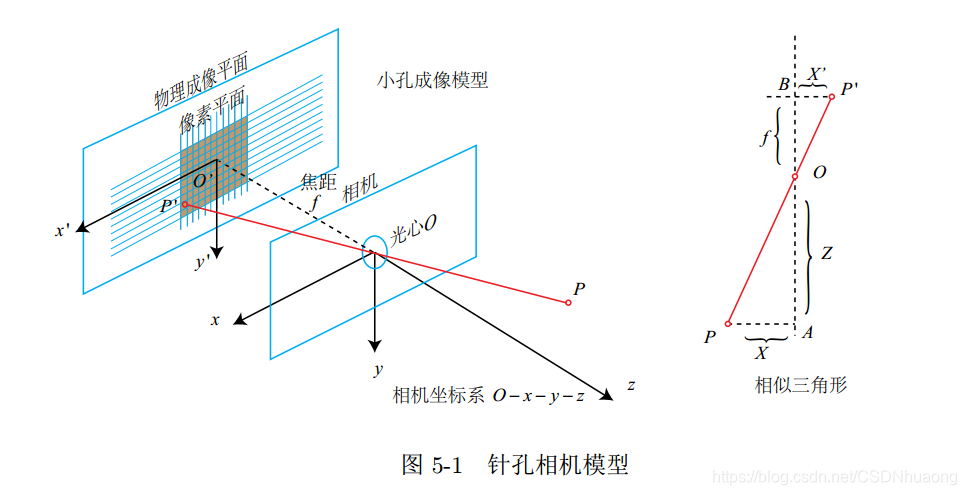
- 相机平面上有两个平面:物理成像平面坐标系和像素平面坐标系
物理成像平面的单位为米,原点在中心
像素平面的单位为像素,原点在边角上
两者之间相差了一个缩放和原点的平移
- 归一化平面上的投影 指的是在相机坐标系下,点的Z坐标归一化的投影
针孔模型下,相机坐标表下的坐标与像素坐标的映射关系
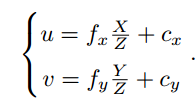
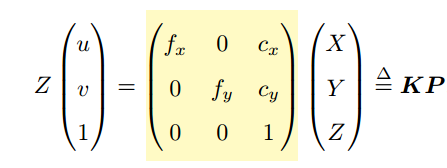
在应用中,往往是已知像素坐标,反推相机坐标系下的坐标
Eigen::Vector3d point;
point[2] = double(d)/depthScale;
point[0] = (u-cx)*point[2]/fx;
point[1] = (v-cy)*point[2]/fy;
双目相机模型
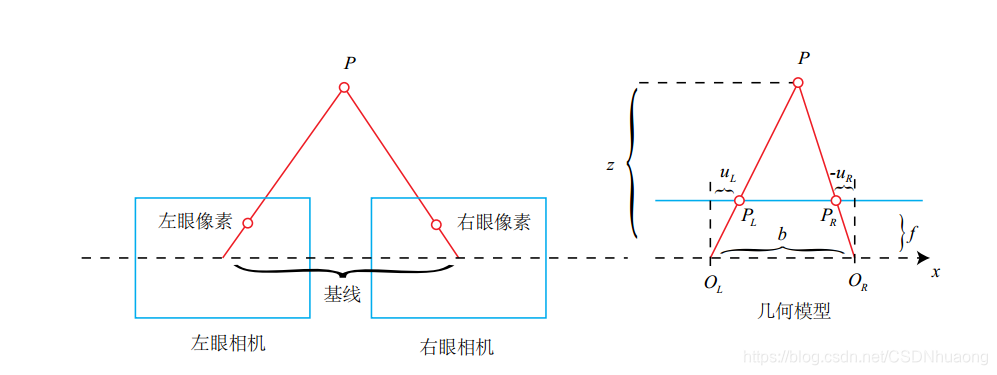
深度可以根据双目算出来,关键是同一个像素点在左右图的像素坐标视差的计算是件困难的事情。















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











