







结果
修改的是PointPillars这个网络模型,参考PointRCNN可视化部分,网络地址,目前只训练车辆的检测部分,运行second和PointPillars可以看这里。
工作:1.一开始框很多,修改了NMS;2.显示score比较高的框;3.涉及参考系之间的变换,坐标需要转换的Lidar坐标系。后续准备计算一下3D的IOU。
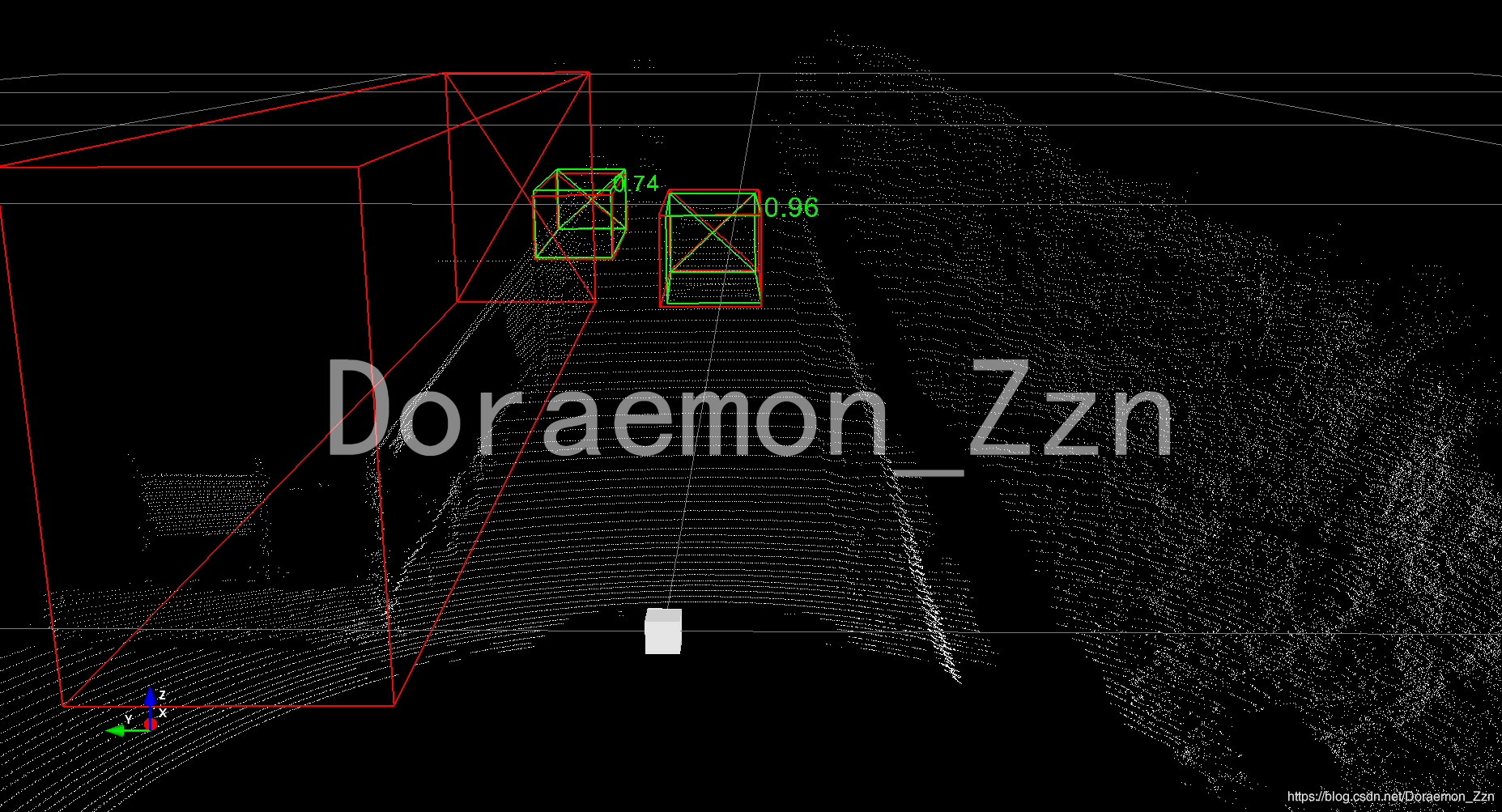
000037.png

预测结果,红色的是label,绿色是预测框。
参考
- https://github.com/kuixu/kitti_object_vis
- https://github.com/sshaoshuai/PointRCNN
- https://blog.csdn.net/tiatiatiatia/article/details/97765165














 7018
7018











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









