







Harris角点检测能够发现稳定性比较好的很多角点,但是也有很多的局限性,比如它检测出的点并没有尺度不变性。这篇文章主要是讨论尺度不变特征点的一些原理。








参考论文:Scale & Affine Invariant Interest Point Detectors 2004
Indexing based on scale invariant interest points 2001
我们先回顾一下Harris Corner的运算过程
其中
高斯高斯进行平滑抑制图像中的噪声
然后加入相应函数
角点对该函数的响应会明显高于平面以及边缘点,原理算法参考博文
http://blog.csdn.net/Ghost__2011/article/details/79492155
接着我们只取在八个相邻响应值中最大的响应来抑制一些响应比较强烈的边界点
但是Harris Corner不能够帮助我们检测出一些不适合的尺度的角点
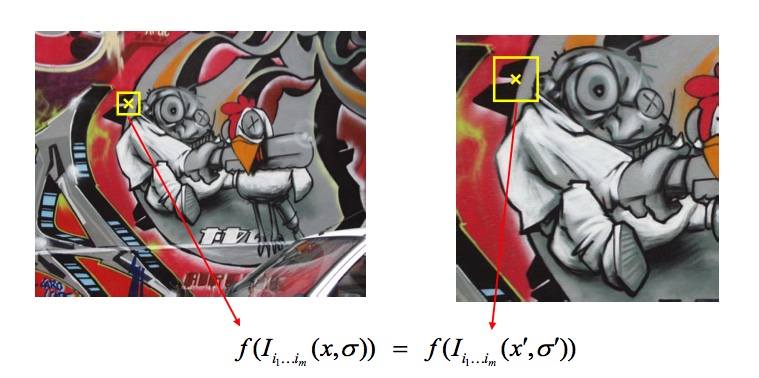
我们引入一个尺度的概念,我们看天上的星星,我们能观察到的就只是一个点,但是如果我们乘坐飞船来到它的旁边,就会发现它并不仅仅是一个点这么简单,这就是尺度的不同所引起的。我们观察远处的景物会比较模糊,近处的物体会比较清晰,从数学上解释,这就是一种自然的高斯模糊,而我们想要模拟尺度的变化,已经被证明,这个操作就是对物体进行了高斯模糊。
现在我们考虑有没有一种方法,能够帮助我们在检测角点的时候,自动的决策出这个角点所在的尺度。这个表述可能不太严谨,什么是角点所在的尺度呢。我们考略一个响应函数对两个不同尺度的图像进行检测,能否让响应函数在两个不同尺度中得到的响应值都相同。或者有没有一个响应函数能够帮我找到一种比较合理的匹配方法。
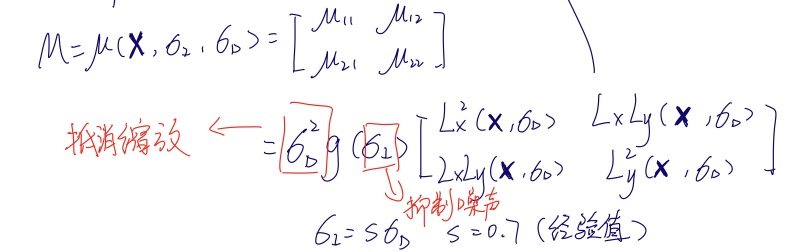
我们在高斯函数中加入尺度元素
σD我们叫做微分尺度,这是我们想要的计算尺度的方法。
σI我们叫做积分尺度,这是用来抑制噪声的高斯函数。
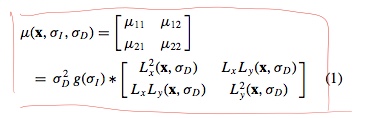
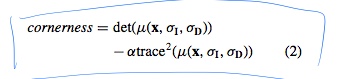
类似Harris角点检测,构造尺度空间的角点检测函数
最后,采用LoG函数进行尺度检测检测
其中LoG推导公式如下:
在SIFT中,用DoG(Difference of Gaussian)去近似LoG算子

可以达到简化运算,增快算法效率的目的
Scale & Affine Invariant Interest Point Detectors 2004
算法中提出了两种检测手段,一种迭代更多但更精确,一种简略但运算简便















 785
785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









