









一、无刷直流电机工作原理
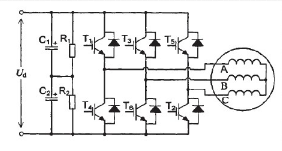
无刷直流电机要转动,需要根据位置传感器的输出信号确认转子位置。然后通过电子换相电路去驱动电机本体使定子电枢绕组依次换相通电,从而在定子电枢绕组上产生旋转磁场,旋转磁场与转子永磁体相互作用驱动转子转动。电机持续的转动依赖于电机的准确换相,电机换相的时机只取决于转子的位置信号。
以常用的两两导通、三相六状态、全桥Y形直流无刷电机驱动控制为例,控制原理如图1。
二、PWM调制方式
全桥逆变电路驱动定子绕组依次通电通常采用PWM调制方式。根据每个导通状态PWM作用管子数目的不同,把调制方式分为两大类:“双斩”方式和“单斩”方式。
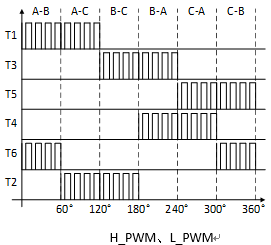
“双斩”方式,通常也称作H-PWM_L-PWM控制方式,每个导通状态控制器上、下桥臂功率管全部进行PWM调制,如图2所示。
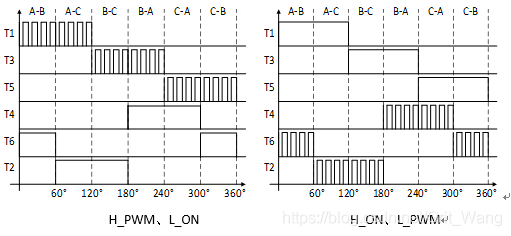
“单斩”方式,即在三相六状态的任意一个状态区间内只对上桥臂或者只对下桥臂的一个功率管进行PWM调制。单斩方式又分为
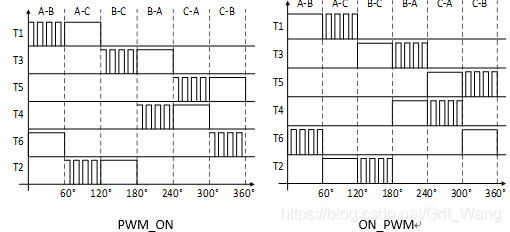
两类,一类是六个导通状态始终只对上桥臂或只对下桥臂的功率管进行PWM调制,这种方式下有一个桥臂的功率管始终在它应该导通的区间内处于全通状态,包括两种方式:H-PWM_L-ON方式和H-ON_L-PWM方式,见图3;另一类是使所有的功率管在导通的区间内轮换导通,包括两种方式:PWM-ON方式和ON-PWM方式,见图4。
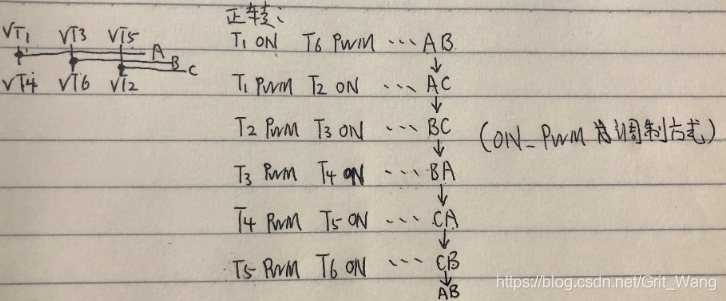
三、正反转控制(ON_PWM调制方式)
正转
直流无刷电机的正反转控制与普通电机不同,在直流无刷电机电动运行过程中,它的通电始终与电机的转子位置信号是分不开的,因此不能简单的通过改变定子绕组导通顺序来改变电机转向。具体的电机转向与转子位置信号以及定子绕组之间的换向关系如图5所示,辅助理解如图6所示。
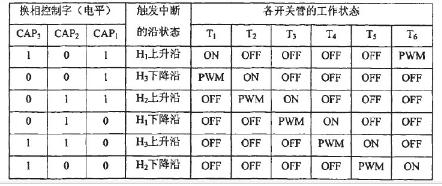
当位置传感器产生上升沿中断时,系统进入中断服务子程序。通过将脉冲捕捉单元的脉冲捕捉口CAP1-CAP3设置为普通I/O口,并检测这三个口的电平状态,就可以确定是电机的那个位置传感器的电平发生变化,从而确定出电机转子磁极现在所处的位置,然后按照电机正转的相序查找数据表来确定电机换向的顺序以及比较单元的控制字,从而实现电机正转时的正确换相。
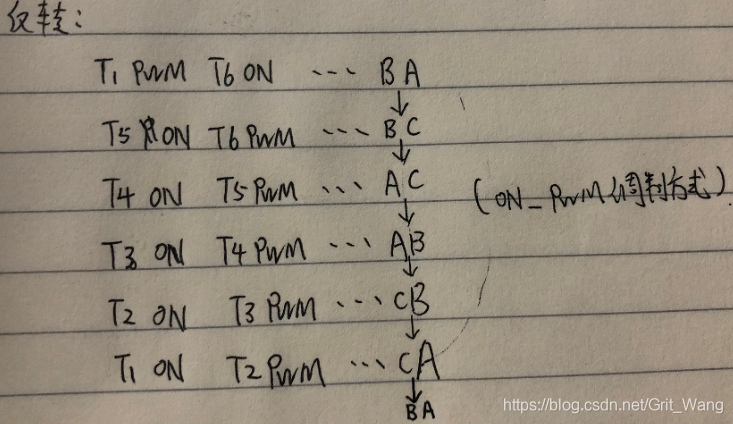
反转
电机反转的过程和电机正转的过程类似,脉冲捕捉单元根据捕捉口的电平状态确定出电机转子所处的位置然后根据电平状态查找电机反转时能够正确换向的数据表来确定电机反转的换相顺序,从而实现电机的反转控制。其具体的位置信号和换相信号之间的关系如图7所示,辅助理解如图8所示。















 3201
3201











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









