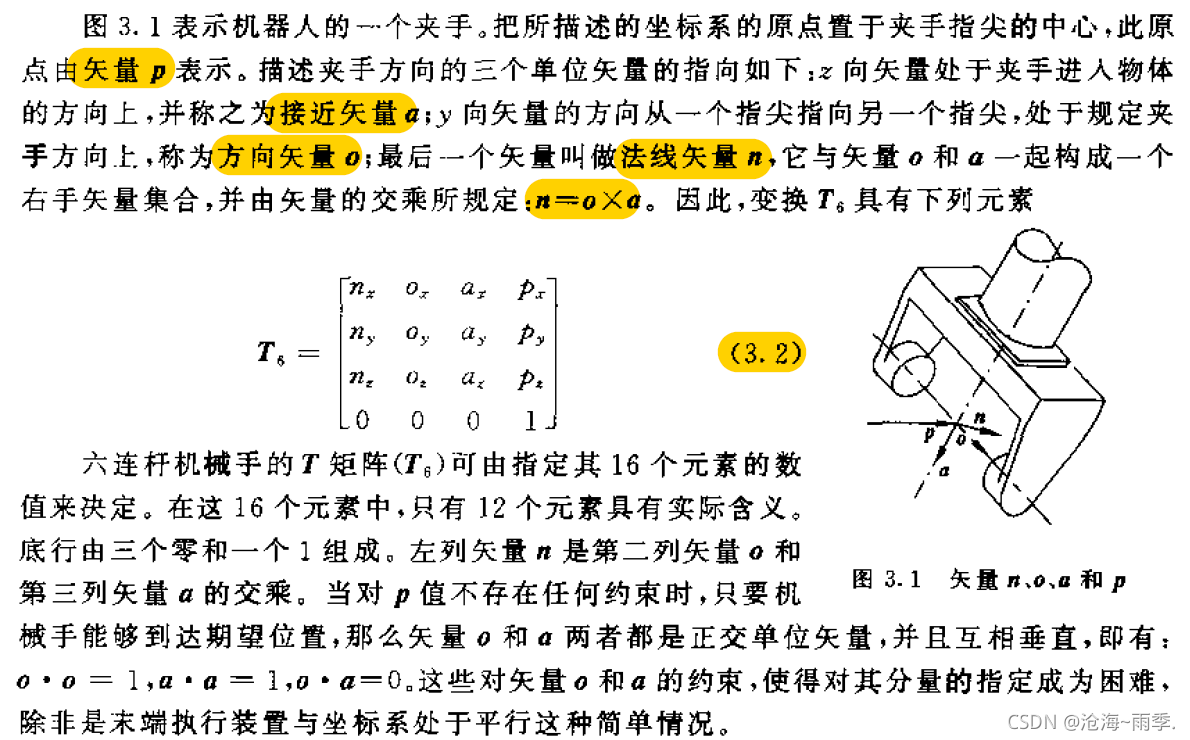
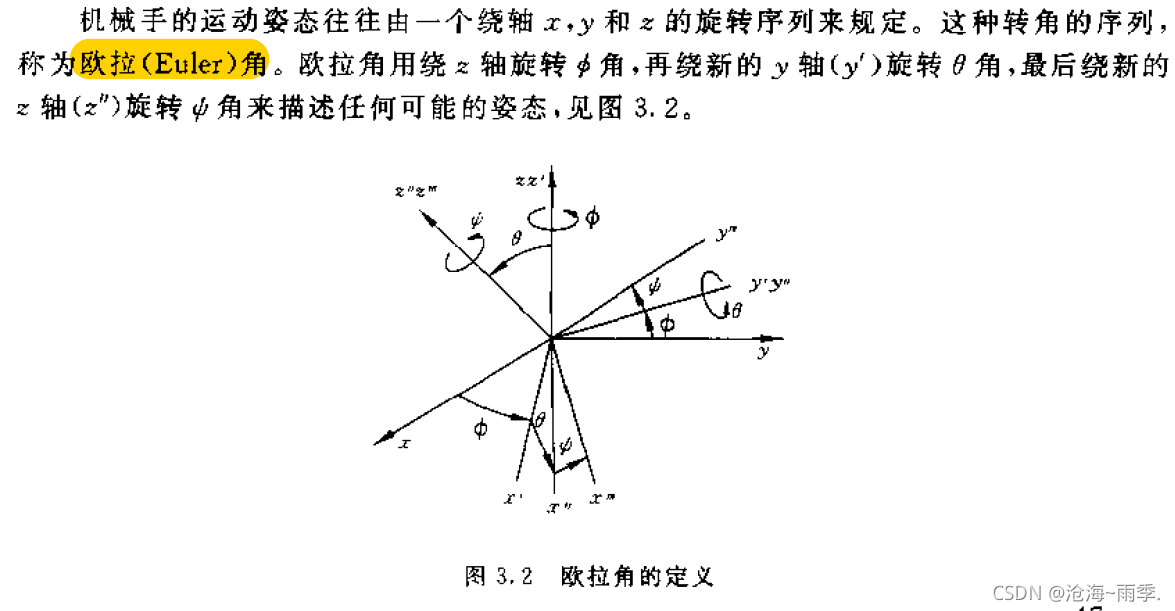
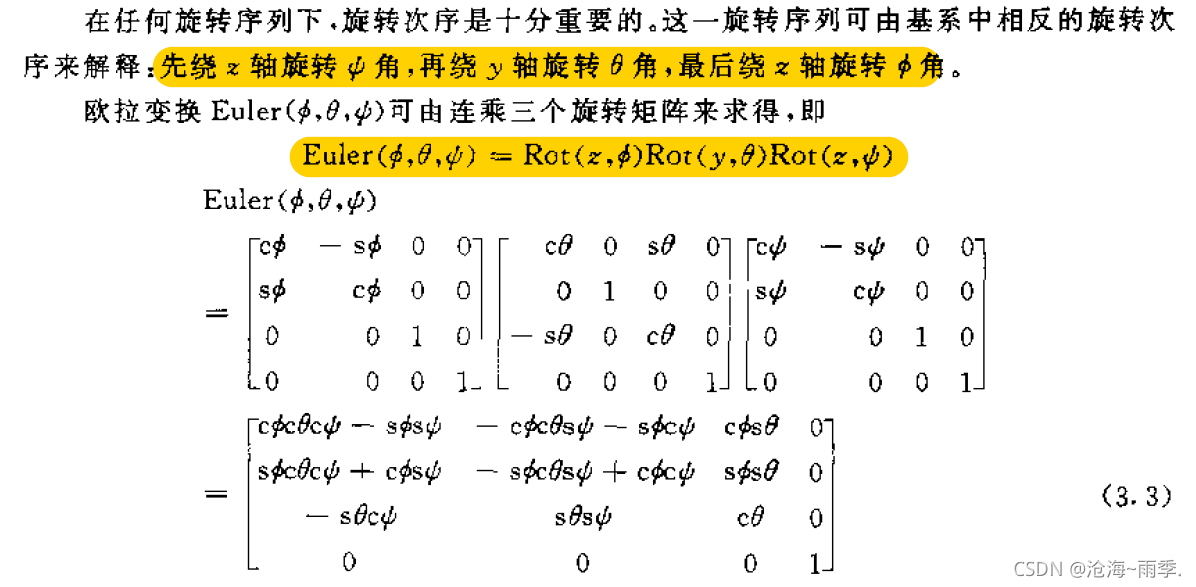
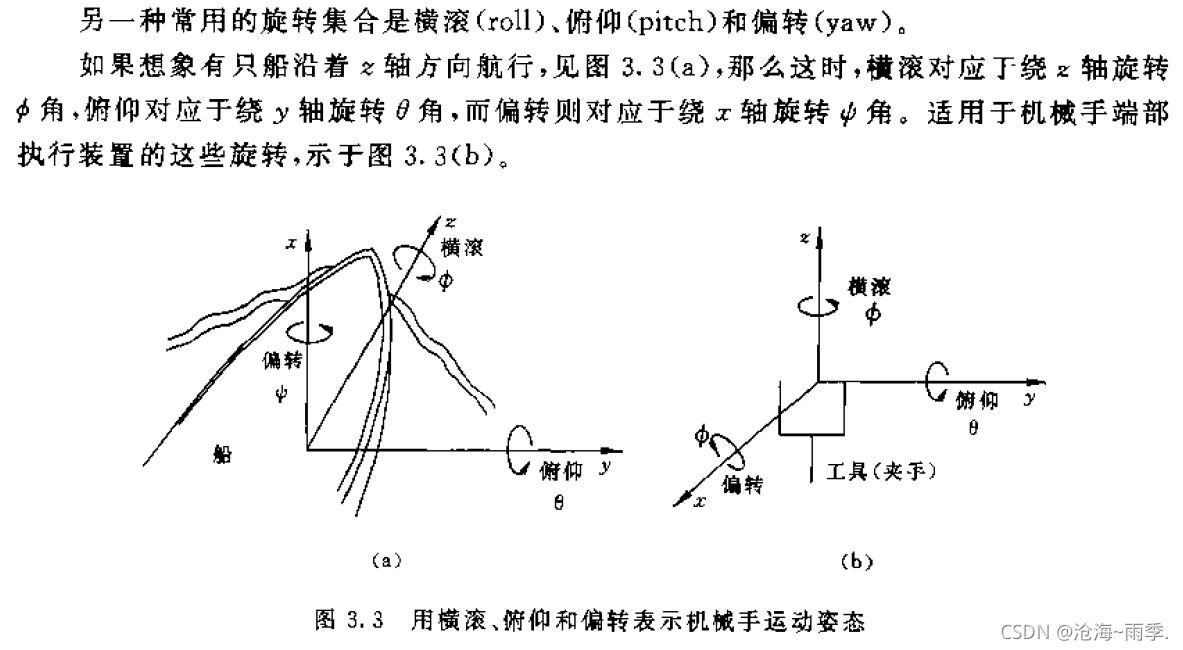
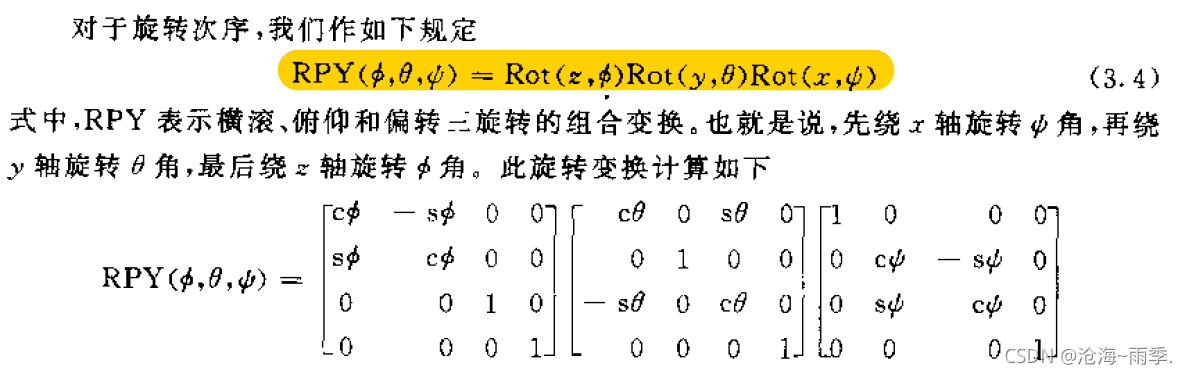
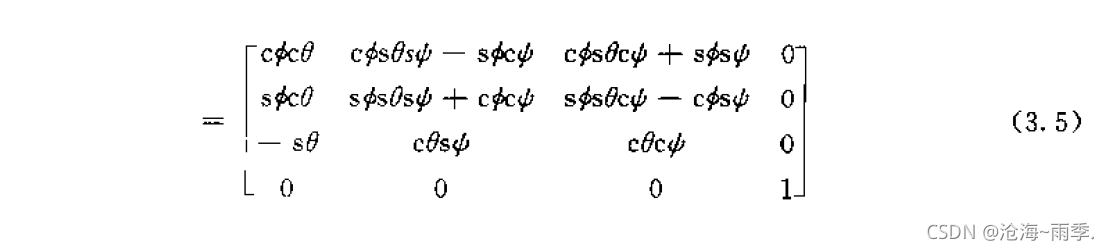
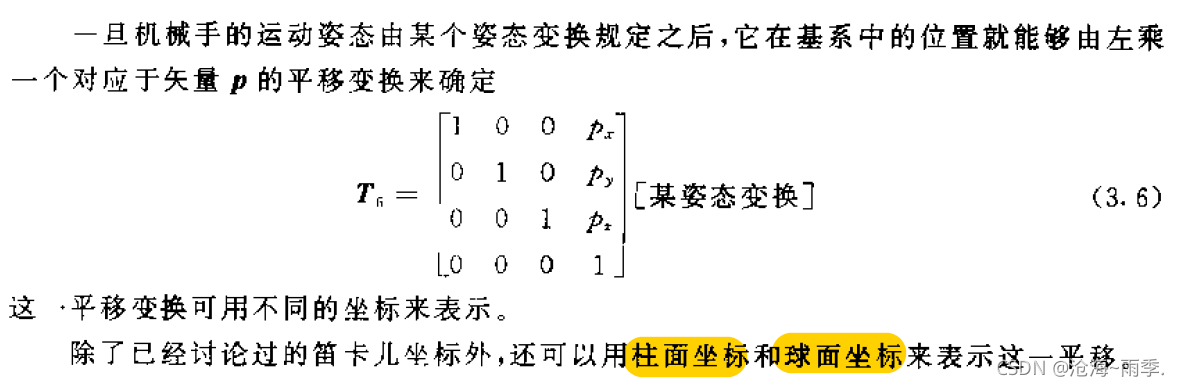
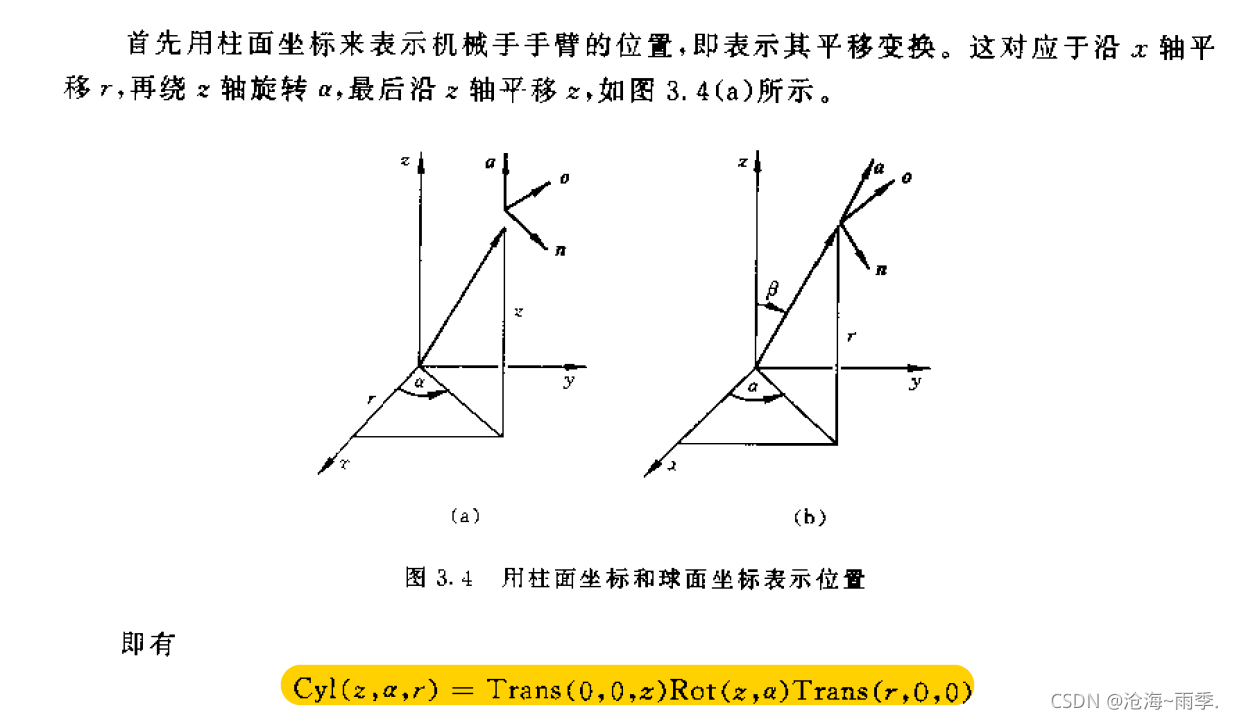
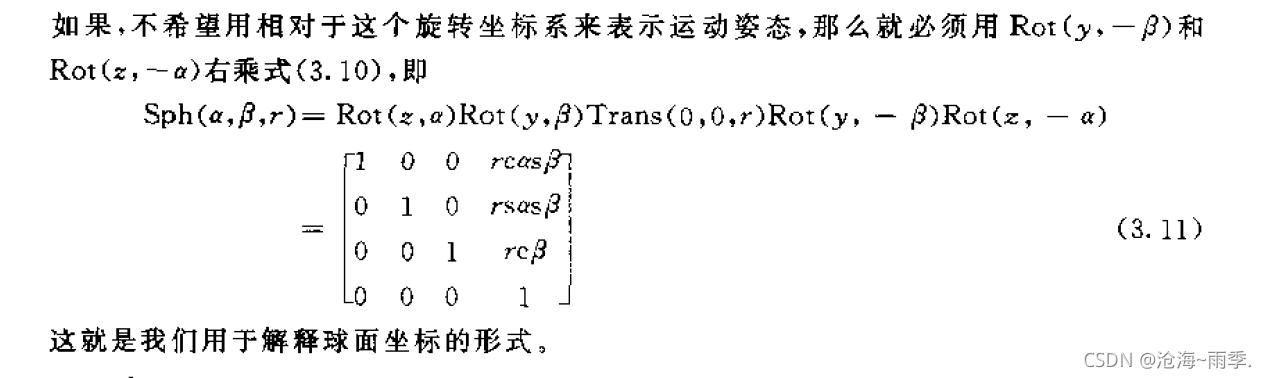
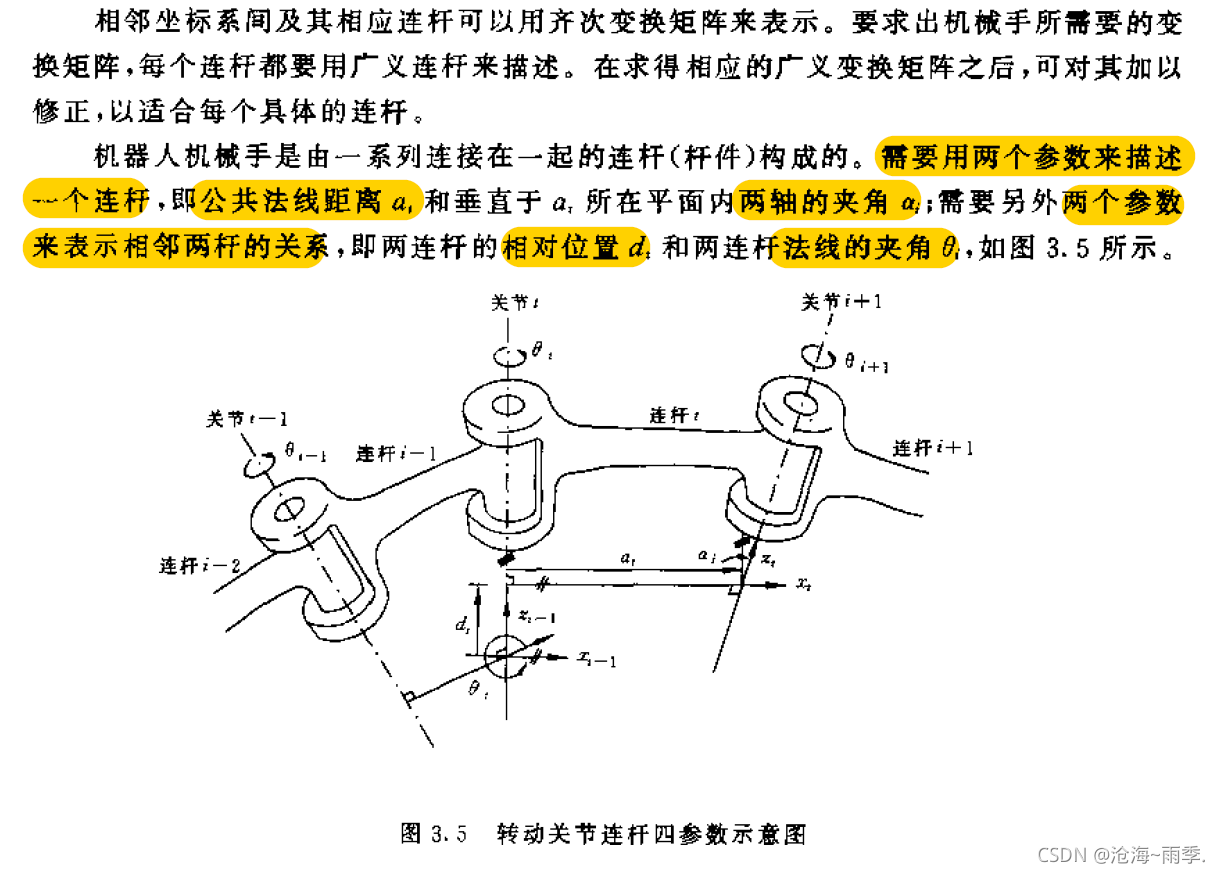
机器人运动方程的表示 通常把描述一个连杆和下一个连杆的相对关系的齐次变换叫做A矩阵 1.1运动姿态和方向角 用矢量来描述机器人的运动方向 欧拉角表示运动姿态 RPY角表示运动姿态 1.2运动位置和坐标 用柱面坐标表示运动位置 用球面坐标表示运动位置 1.3连杆变换矩阵及其乘积 曾把表示相邻两连杆空间变换关系的矩阵称为A矩阵,也叫连杆变换矩阵,并把两个以上A矩阵的乘积叫做T矩阵。 广义连杆 下一篇我们将会讲到如何建立连杆坐标系以及描述连杆之间的相对关系的方法。























 226
226











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






