









操作系统系列
学习至此,发现很多学了但很久没用的知识,久而久之,慢慢遗忘。等哪天还需要的话,却发现已经忘得差不多了,即使整理了文档(word等),还是得从头再学一遍。读研第一学期,发现很多东西都可以从博客上学习到,也有不少博主呕心沥血整理了挺多有用的博文。于是,本人借此契机,也慢慢开始整理一些博文,不断改进完善中。整理博文(IT)有如下目的:
- 首要目的:记录“求学生涯”的所学所悟,不断修改,不断更新!(有读者的互动)
- 其次目的:在这“开源”的时代,整理并分享所学所悟是一种互利的行为!
6个实验相关代码的下载地址:http://download.csdn.net/detail/houchaoqun_xmu/9865648
-------------------------------
磁盘调度算法
一、概念介绍和案例解析
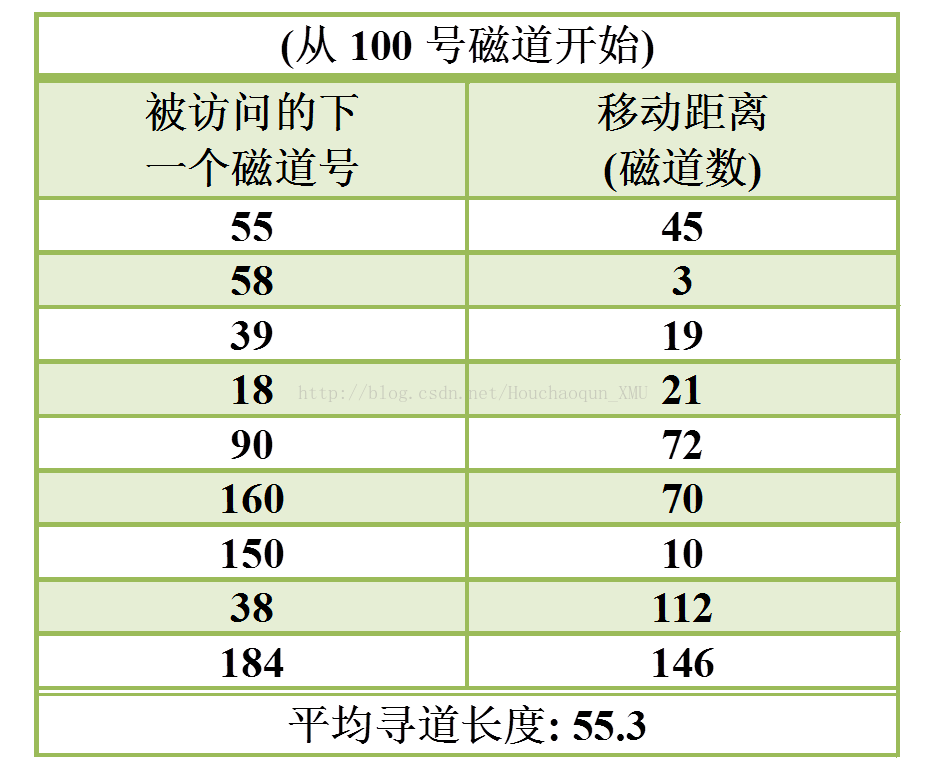
- 先来先服务(FCFS,First Come First Served):
此算法的优点是公平、简单,且每个进程的请求都能依次地得到处理,不会出现某一进程的请求长期得不到满足的情况。但此算法由于未对寻道进行优化,致使平均寻道时间可能较长。
下图示出了有9个进程先后提出磁盘I/O请求时,按FCFS算法进行调度的情况。这里将进程号(请求者)按他们发出请求的先后次序排队。这样,平均寻道距离为55.3条磁道,与后面即将讲到的几种调度算法相比,其平均寻道距离较大,故FCFS算法仅适用于请求磁盘I/O的进程数目较少的场合。
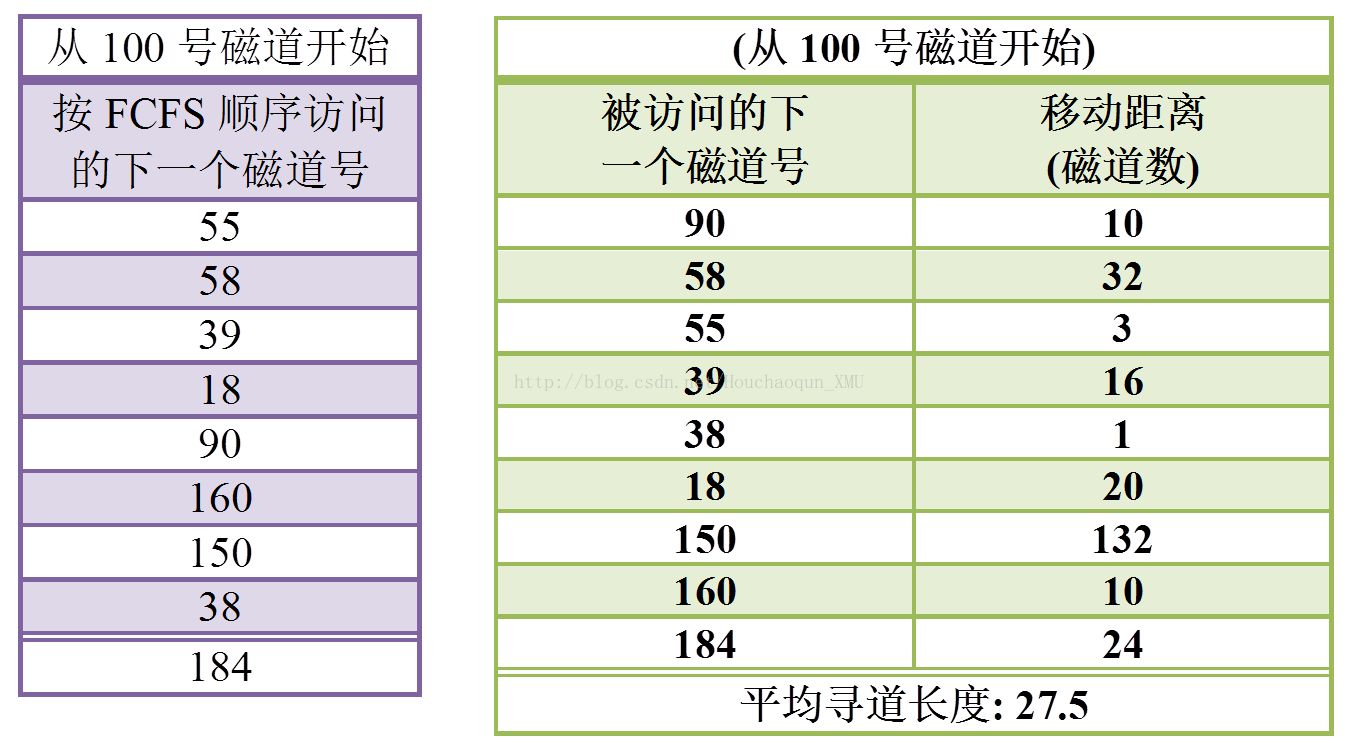
- 最短寻道时间优先(SSTF,Shortest Seek Time First):
下图示出了按SSTF算法进行调度时,各进程被调度的次序、每次磁头移动的距离,以及9次调度磁头平均移动的距离。
比较图5-25和图5-26可以看出,SSTF算法的平均每次磁头移动距离明显低于FCFS的距离,因而SSTF较之FCFS有更好的寻道性能,故过去曾一度被广泛采用。
- 扫描(SCAN)算法:
SSTF算法虽然能获得较好的寻道性能,但却可能导致某个进程发生“饥饿”(Starvation)现象。
因为只要不断有新进程的请求到达,且其所要访问的磁道与磁头当前所在磁道的距离较近,这种新进程的I/O请求必然优先满足。
对SSTF算法略加修改后所形成的SCAN算法,即可防止老进程出现“饥饿”现象。
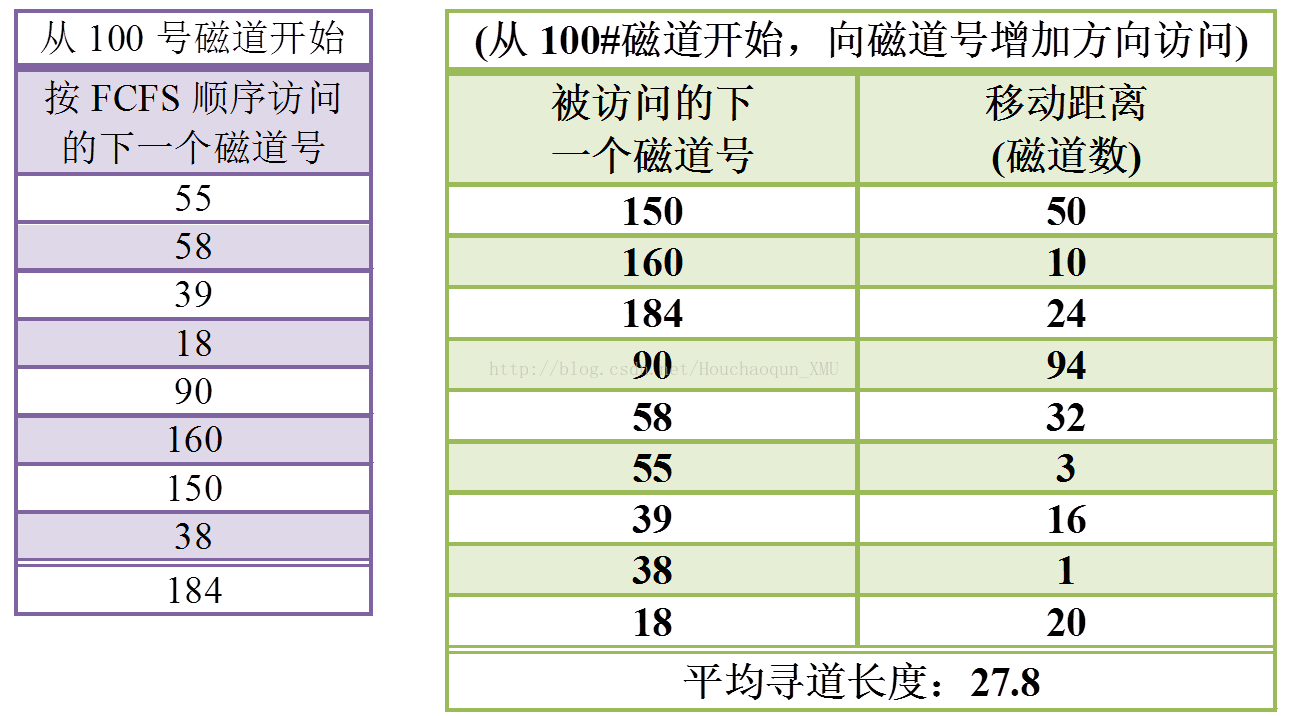
2) SCAN算法
该算法不仅考虑到欲访问的磁道与当前磁道间的距离,更优先考虑的是磁头当前的移动方向。例如,当磁头正在自里向外移动时,SCAN算法所考虑的下一个访问对象,应是其欲访问的磁道既在当前磁道之外,又是距离最近的。这样自里向外地访问,直至再无更外的磁道需要访问时,才将磁臂换向为自外向里移动。这时,同样也是每次选择这样的进程来调度,即要访问的磁道在当前位置内距离最近者,这样,磁头又逐步地从外向里移动,直至再无更里面的磁道要访问,从而避免了出现“饥饿”现象。
由于在这种算法中磁头移动的规律颇似电梯的运行,因而又常称之为电梯调度算法。图 5-27示出了按SCAN算法对9个进程进行调度及磁头移动的情况。
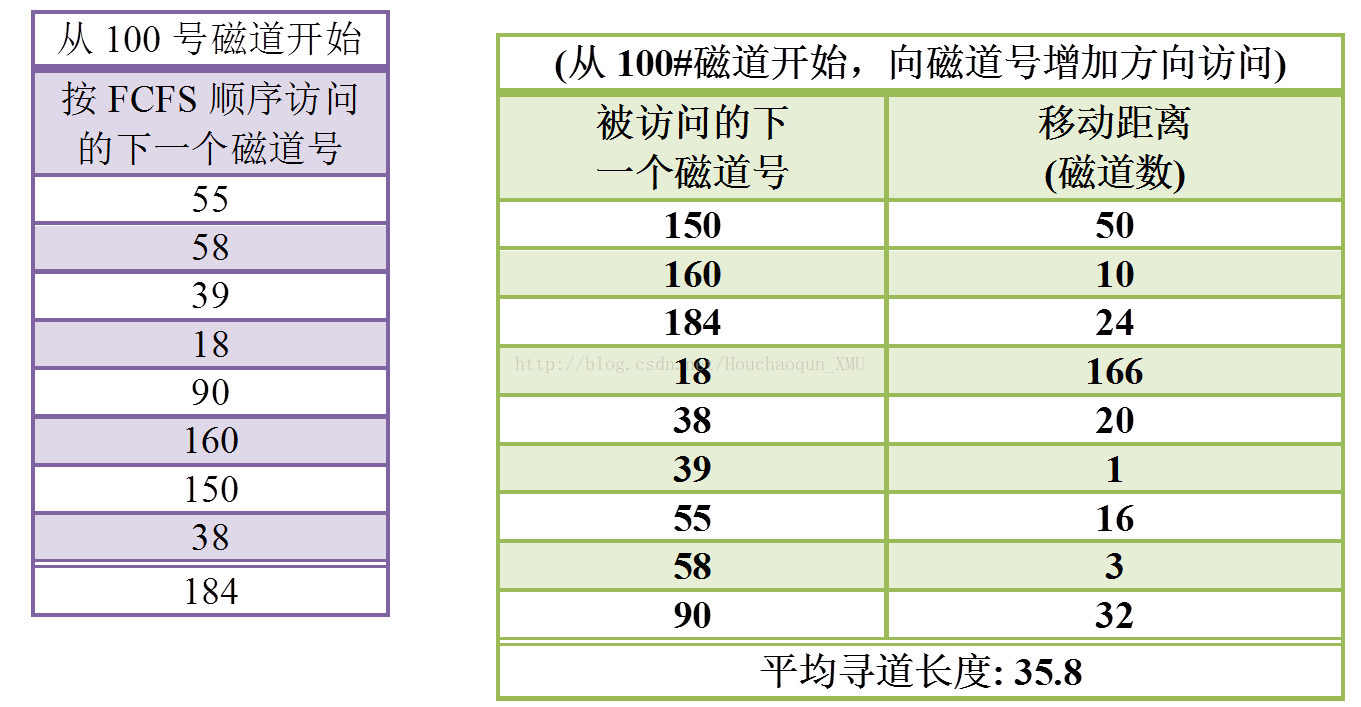
- 循环扫描(CSCAN)算法:
但SCAN也存在这样的问题:当磁头刚从里向外移动而越过了某一磁道时,恰好又有一进程请求访问此磁道,这时,该进程必须等待,待磁头继续从里向外,然后再从外向里扫描完所有要访问的磁道后,才处理该进程的请求,致使该进程的请求被大大地推迟。
为了减少这种延迟,CSCAN算法规定磁头单向移动,例如,只是自里向外移动,当磁头移到最外的磁道并访问后,磁头立即返回到最里的欲访问的磁道,亦即将最小磁道号紧接着最大磁道号构成循环,进行循环扫描。
采用循环扫描方式后,上述请求进程的请求延迟将从原来的2T减为T + Smax,其中,T为由里向外或由外向里单向扫描完要访问的磁道所需的寻道时间,而Smax是将磁头从最外面被访问的磁道直接移到最里面欲访问的磁道(或相反)的寻道时间。图5-28示出了CSCAN算法对9个进程调度的次序及每次磁头移动的距离。
二、实验介绍
- 问题描述:
设计程序模拟先来先服务FCFS、最短寻道时间优先SSTF、SCAN和循环SCAN算法的工作过程。假设有n个磁道号所组成的磁道访问序列,给定开始磁道号m和磁头移动的方向(正向或者反向),分别利用不同的磁盘调度算法访问磁道序列,给出每一次访问的磁头移动距离,计算每种算法的平均寻道长度。
- 程序要求:
1)利用先来先服务FCFS、最短寻道时间优先SSTF、SCAN和循环SCAN算法模拟磁道访问过程。
2)模拟四种算法的磁道访问过程,给出每个磁道访问的磁头移动距离。
3)输入:磁道个数n和磁道访问序列,开始磁道号m和磁头移动方向(对SCAN和循环SCAN算法有效),算法选择1-FCFS,2-SSTF,3-SCAN,4-循环SCAN。
4)输出:每种算法的平均寻道长度。
三、程序设计和程序开发
- 算法思想:
1)先来先服务(FCFS,FirstCome First Served):根据进程请求访问磁盘的先后次序进行调度此算法的优点是公平、简单,且每个进程的请求都能依次地得到处理,不会出现某一进程的请求长期得不到满足的情况。但此算法由于未对寻道进行优化,致使平均寻道时间可能较长。
2)最短寻道时间优先(SSTF,ShortestSeek Time First):该算法选择这样的进程:其要求访问的磁道与当前磁头所在的磁道距离最近,以使每次的寻道时间最短。但这种算法不能保证平均寻道时间最短。
3)扫描(SCAN)算法:算法不仅考虑到欲访问的磁道与当前磁道间的距离,更优先考虑的是磁头当前的移动方向。例如,当磁头正在自里向外移动时,SCAN算法所考虑的下一个访问对象,应是其欲访问的磁道既在当前磁道之外,又是距离最近的。
4)循环扫描(CSCAN)算法:CSCAN算法规定磁头单向移动,例如,只是自里向外移动,当磁头移到最外的磁道并访问后,磁头立即返回到最里的欲访问的磁道,亦即将最小磁道号紧接着最大磁道号构成循环,进行循环扫描。
- 核心算法:
void FCFS()
{
cout<<"******* 你选择了FCFS算法 ***********************************"<<endl;
initial();
MoveDistance[0] = getPositive(TrackOrder[0],StartTrack);
totalDistance = MoveDistance[0];
VisitOrder[0] = TrackOrder[0];
for (int i=1;i<TrackNum;i++)
{
MoveDistance[i] = getPositive(TrackOrder[i],TrackOrder[i-1]);
totalDistance += MoveDistance[i];
VisitOrder[i] = TrackOrder[i];
}
AverageDistance = totalDistance*1.0/TrackNum;
display();
cout<<"******* FCFS算法结束 ***********************************"<<endl;
}void SSTF()
{
cout<<"******* 你选择了SSTF算法 ***********************************"<<endl;
initial();
int CurrentTrack = StartTrack; //
int i,j,pointMin;
int disTemp[MaxNumber];
for (i = 0;i<TrackNum;i++)
{
for (j = 0;j<TrackNum;j++)
{
if (!isVisited[j])
{
disTemp[j] = getPositive(TrackOrder[j],CurrentTrack);
}
else
disTemp[j] = 10000; //表示无穷远,即访问过的磁道就不再访问
}
pointMin = 0;
for (j = 0;j<TrackNum;j++)
{
if (disTemp[pointMin] > disTemp[j])
{
pointMin = j; //指向最小的位置
}
}
VisitOrder[i] = TrackOrder[pointMin]; //给访问序列赋值
MoveDistance[i] = getPositive(TrackOrder[pointMin],CurrentTrack); //计算每次的移动距离
totalDistance += MoveDistance[i]; //累计移动距离
CurrentTrack = TrackOrder[pointMin]; //改变当前的磁道号
isVisited[pointMin] = true; //将当前的磁道号设置为已访问
}
AverageDistance = totalDistance*1.0/(TrackNum);
display();
cout<<"******* SSTF算法结束 ***********************************"<<endl;
}void SCAN()
{
/*
算法思想:
1. SCAN算法所考虑的下一个访问对象,应是其欲访问的磁道既在当前磁道之外,又是距离最近的
直至再无更外的磁道需要访问时,才将磁臂换向为自外向里移动
2. 本程序先将磁道序列从小到大进行排序,再进行相应的处理,时间复杂度为取决于排序算法的时间复杂度
*/
cout<<"******* 你选择了SCAN算法 ***********************************"<<endl;
cout<<"******* 请选择头移动方向 *******"<<endl;
cout<<"******* 0表示向磁道增加的方向访问 *******"<<endl;
cout<<"******* 1表示向磁道减小的方向访问 *******"<<endl;
cout<<"direction = ";
cin>>direction;
initial();
int TrackOrderIndex[MaxNumber],SortTrackOrder[MaxNumber];
int i,j,temp,tempIndex;
for (i = 0;i<TrackNum;i++)
{
TrackOrderIndex[i] = i;
SortTrackOrder[i] = TrackOrder[i];
}
for (i = TrackNum - 1;i>0;i--)
{
for (j = 0;j<i;j++)
{
if (SortTrackOrder[j]>=SortTrackOrder[j+1])
{
//更新排序后的磁道号
temp = SortTrackOrder[j];
SortTrackOrder[j] = SortTrackOrder[j+1];
SortTrackOrder[j+1] = temp;
//更新排序后的磁道号索引值
tempIndex = TrackOrderIndex[j];
TrackOrderIndex[j] = TrackOrderIndex[j+1];
TrackOrderIndex[j+1] = tempIndex;
}//if
}//for
}//for 获得排序后的磁道号以及对应的原来的索引值
int point = 0;
while(StartTrack>=SortTrackOrder[point])
{
point++;
} //找到当前对应的:既在当前磁道之外,又是距离最近的磁道号索引值point
int count = 0;
int currentTrack = StartTrack;
if (direction == 0) //向磁道增加的方向访问
{
cout<<" 向磁道增加的方向访问"<<endl;
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i = point - 1;i>=0;i--)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//if
else if (direction == 1)
{
cout<<" 向磁道减小的方向访问"<<endl;
for (i = point - 1;i>=0;i--)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//else
for (i = 0;i<TrackNum;i++)
{
totalDistance += MoveDistance[i];
}
AverageDistance = (totalDistance*1.0)/TrackNum;
display();
cout<<"******* SCAN算法结束 ***********************************"<<endl;
}void ImprovedSCAN()
{
cout<<"******* 你选择了ImprovedSCAN算法 ***********************************"<<endl;
cout<<"******* 请选择头移动方向 *******"<<endl;
cout<<"******* 0表示向磁道增加的方向访问 *******"<<endl;
cout<<"******* 1表示向磁道减小的方向访问 *******"<<endl;
cin>>direction;
initial();
int TrackOrderIndex[MaxNumber],SortTrackOrder[MaxNumber];
int i,j,temp,tempIndex;
for (i = 0;i<TrackNum;i++)
{
TrackOrderIndex[i] = i;
SortTrackOrder[i] = TrackOrder[i];
}
for (i = TrackNum - 1;i>0;i--)
{
for (j = 0;j<i;j++)
{
if (SortTrackOrder[j]>=SortTrackOrder[j+1])
{
//更新排序后的磁道号
temp = SortTrackOrder[j];
SortTrackOrder[j] = SortTrackOrder[j+1];
SortTrackOrder[j+1] = temp;
//更新排序后的磁道号索引值
tempIndex = TrackOrderIndex[j];
TrackOrderIndex[j] = TrackOrderIndex[j+1];
TrackOrderIndex[j+1] = tempIndex;
}//if
}//for
}//for 获得排序后的磁道号以及对应的原来的索引值
int point = 0;
while(StartTrack>=SortTrackOrder[point])
{
point++;
} //找到当前对应的:既在当前磁道之外,又是距离最近的磁道号索引值point
int count = 0;
int currentTrack = StartTrack;
if (direction == 0) //向磁道增加的方向访问
{
cout<<" 向磁道增加的方向访问"<<endl;
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i =0;i<point;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//if
else if (direction == 1)
{
cout<<" 向磁道减小的方向访问"<<endl;
for (i = 0;i<point;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//else
for (i = 0;i<TrackNum;i++)
{
totalDistance += MoveDistance[i];
}
AverageDistance = (totalDistance*1.0)/TrackNum;
display();
cout<<"******* ImprovedSCAN算法结束 ***********************************"<<endl;
}四、实验结果分析
- 实验数据:
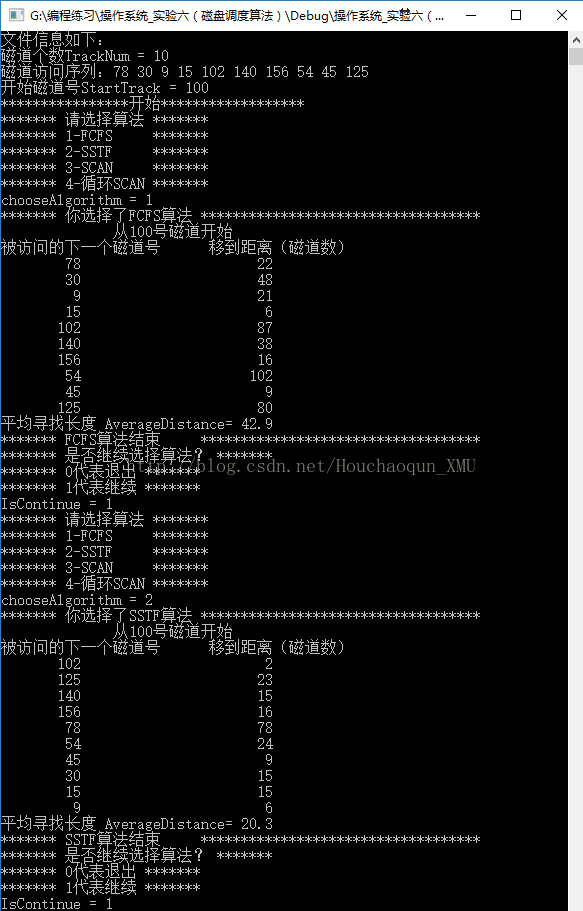
10
78 30 9 15 102 140 156 54 45 125
100- 实验结果:
五、实验源码
// 操作系统_实验六(磁盘调度算法).cpp : 定义控制台应用程序的入口点。
//
#include <iostream>
#include <fstream>
#include <iomanip>
using namespace std;
const int MaxNumber=100;
int TrackNum;
int StartTrack;
int TrackOrder[MaxNumber];
int VisitOrder[MaxNumber];
bool isVisited[MaxNumber];
int MoveDistance[MaxNumber];
int totalDistance;
double AverageDistance;
bool direction;
void input();
void initial();
int getPositive(int num1,int num2);
void FCFS();
void SSTF();
void SCAN();
void ImprovedSCAN();
void display();
void input()
{
ifstream readData;
readData.open("data2.txt");
readData>>TrackNum; //磁道个数
for (int i=0;i<TrackNum;i++)
{
readData>>TrackOrder[i]; //磁道访问序列
}
readData>>StartTrack; //开始磁道号
cout<<"文件信息如下:"<<endl;
cout<<"磁道个数TrackNum = "<<TrackNum<<endl;
cout<<"磁道访问序列:";
for (int i=0;i<TrackNum;i++)
{
cout<<TrackOrder[i]<<" ";
}
cout<<endl;
cout<<"开始磁道号StartTrack = "<<StartTrack<<endl;
cout<<"****************开始******************"<<endl;
}
int getPositive(int num1,int num2)
{
if (num1 - num2>0)
{
return (num1 - num2);
}
else
return (num2 - num1);
}
void initial()
{
for (int i=0;i<TrackNum;i++)
{
MoveDistance[i] = 0;
VisitOrder[i] = TrackOrder[i];
isVisited[i] = false;
}
totalDistance = 0;
AverageDistance = 0;
}
void FCFS()
{
cout<<"******* 你选择了FCFS算法 ***********************************"<<endl;
initial();
MoveDistance[0] = getPositive(TrackOrder[0],StartTrack);
totalDistance = MoveDistance[0];
VisitOrder[0] = TrackOrder[0];
for (int i=1;i<TrackNum;i++)
{
MoveDistance[i] = getPositive(TrackOrder[i],TrackOrder[i-1]);
totalDistance += MoveDistance[i];
VisitOrder[i] = TrackOrder[i];
}
AverageDistance = totalDistance*1.0/TrackNum;
display();
cout<<"******* FCFS算法结束 ***********************************"<<endl;
}
void SSTF()
{
cout<<"******* 你选择了SSTF算法 ***********************************"<<endl;
initial();
int CurrentTrack = StartTrack; //
int i,j,pointMin;
int disTemp[MaxNumber];
for (i = 0;i<TrackNum;i++)
{
for (j = 0;j<TrackNum;j++)
{
if (!isVisited[j])
{
disTemp[j] = getPositive(TrackOrder[j],CurrentTrack);
}
else
disTemp[j] = 10000; //表示无穷远,即访问过的磁道就不再访问
}
pointMin = 0;
for (j = 0;j<TrackNum;j++)
{
if (disTemp[pointMin] > disTemp[j])
{
pointMin = j; //指向最小的位置
}
}
VisitOrder[i] = TrackOrder[pointMin]; //给访问序列赋值
MoveDistance[i] = getPositive(TrackOrder[pointMin],CurrentTrack); //计算每次的移动距离
totalDistance += MoveDistance[i]; //累计移动距离
CurrentTrack = TrackOrder[pointMin]; //改变当前的磁道号
isVisited[pointMin] = true; //将当前的磁道号设置为已访问
}
AverageDistance = totalDistance*1.0/(TrackNum);
display();
cout<<"******* SSTF算法结束 ***********************************"<<endl;
}
void SCAN()
{
/*
算法思想:
1. SCAN算法所考虑的下一个访问对象,应是其欲访问的磁道既在当前磁道之外,又是距离最近的
直至再无更外的磁道需要访问时,才将磁臂换向为自外向里移动
2. 本程序先将磁道序列从小到大进行排序,再进行相应的处理,时间复杂度为取决于排序算法的时间复杂度
*/
cout<<"******* 你选择了SCAN算法 ***********************************"<<endl;
cout<<"******* 请选择头移动方向 *******"<<endl;
cout<<"******* 0表示向磁道增加的方向访问 *******"<<endl;
cout<<"******* 1表示向磁道减小的方向访问 *******"<<endl;
cout<<"direction = ";
cin>>direction;
initial();
int TrackOrderIndex[MaxNumber],SortTrackOrder[MaxNumber];
int i,j,temp,tempIndex;
for (i = 0;i<TrackNum;i++)
{
TrackOrderIndex[i] = i;
SortTrackOrder[i] = TrackOrder[i];
}
for (i = TrackNum - 1;i>0;i--)
{
for (j = 0;j<i;j++)
{
if (SortTrackOrder[j]>=SortTrackOrder[j+1])
{
//更新排序后的磁道号
temp = SortTrackOrder[j];
SortTrackOrder[j] = SortTrackOrder[j+1];
SortTrackOrder[j+1] = temp;
//更新排序后的磁道号索引值
tempIndex = TrackOrderIndex[j];
TrackOrderIndex[j] = TrackOrderIndex[j+1];
TrackOrderIndex[j+1] = tempIndex;
}//if
}//for
}//for 获得排序后的磁道号以及对应的原来的索引值
int point = 0;
while(StartTrack>=SortTrackOrder[point])
{
point++;
} //找到当前对应的:既在当前磁道之外,又是距离最近的磁道号索引值point
int count = 0;
int currentTrack = StartTrack;
if (direction == 0) //向磁道增加的方向访问
{
cout<<" 向磁道增加的方向访问"<<endl;
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i = point - 1;i>=0;i--)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//if
else if (direction == 1)
{
cout<<" 向磁道减小的方向访问"<<endl;
for (i = point - 1;i>=0;i--)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//else
for (i = 0;i<TrackNum;i++)
{
totalDistance += MoveDistance[i];
}
AverageDistance = (totalDistance*1.0)/TrackNum;
display();
cout<<"******* SCAN算法结束 ***********************************"<<endl;
}
void ImprovedSCAN()
{
cout<<"******* 你选择了ImprovedSCAN算法 ***********************************"<<endl;
cout<<"******* 请选择头移动方向 *******"<<endl;
cout<<"******* 0表示向磁道增加的方向访问 *******"<<endl;
cout<<"******* 1表示向磁道减小的方向访问 *******"<<endl;
cin>>direction;
initial();
int TrackOrderIndex[MaxNumber],SortTrackOrder[MaxNumber];
int i,j,temp,tempIndex;
for (i = 0;i<TrackNum;i++)
{
TrackOrderIndex[i] = i;
SortTrackOrder[i] = TrackOrder[i];
}
for (i = TrackNum - 1;i>0;i--)
{
for (j = 0;j<i;j++)
{
if (SortTrackOrder[j]>=SortTrackOrder[j+1])
{
//更新排序后的磁道号
temp = SortTrackOrder[j];
SortTrackOrder[j] = SortTrackOrder[j+1];
SortTrackOrder[j+1] = temp;
//更新排序后的磁道号索引值
tempIndex = TrackOrderIndex[j];
TrackOrderIndex[j] = TrackOrderIndex[j+1];
TrackOrderIndex[j+1] = tempIndex;
}//if
}//for
}//for 获得排序后的磁道号以及对应的原来的索引值
int point = 0;
while(StartTrack>=SortTrackOrder[point])
{
point++;
} //找到当前对应的:既在当前磁道之外,又是距离最近的磁道号索引值point
int count = 0;
int currentTrack = StartTrack;
if (direction == 0) //向磁道增加的方向访问
{
cout<<" 向磁道增加的方向访问"<<endl;
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i =0;i<point;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//if
else if (direction == 1)
{
cout<<" 向磁道减小的方向访问"<<endl;
for (i = 0;i<point;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
for (i = point;i<TrackNum;i++)
{
VisitOrder[count] = SortTrackOrder[i];
MoveDistance[count] = getPositive(VisitOrder[count],currentTrack);
currentTrack = VisitOrder[count];
count++;
}
}//else
for (i = 0;i<TrackNum;i++)
{
totalDistance += MoveDistance[i];
}
AverageDistance = (totalDistance*1.0)/TrackNum;
display();
cout<<"******* ImprovedSCAN算法结束 ***********************************"<<endl;
}
void display()
{
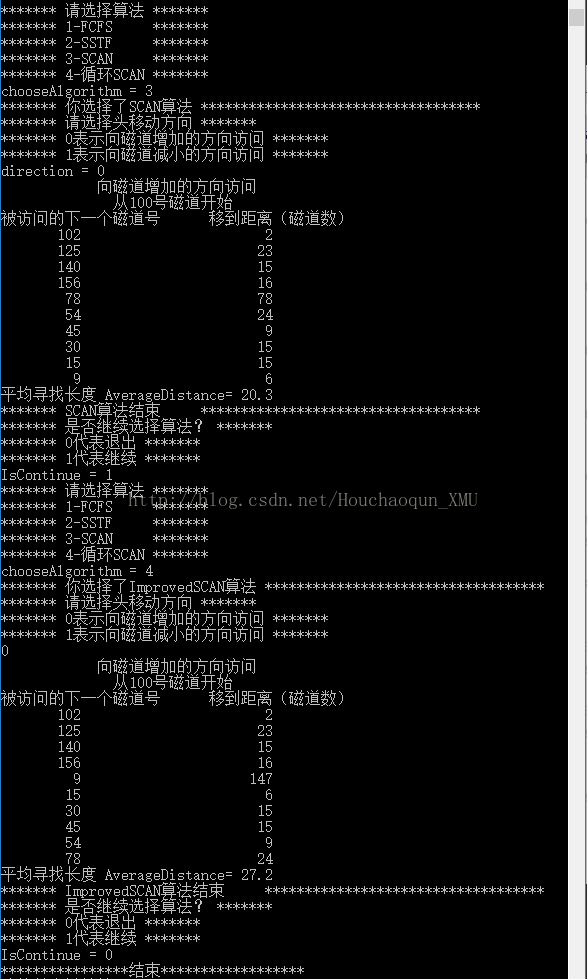
cout<<setw(16)<<"从"<<StartTrack<<"号磁道开始"<<setw(4)<<endl;
cout<<setw(2)<<"被访问的下一个磁道号 "<<setw(6)<<" 移到距离(磁道数)"<<setw(4)<<endl;
for (int i=0;i<TrackNum;i++)
{
cout<<setw(10)<<VisitOrder[i]<<setw(24)<<MoveDistance[i]<<setw(8)<<endl;
}
cout<<"平均寻找长度 AverageDistance= "<<AverageDistance<<endl;
}
int main()
{
input();
int chooseAlgorithm;
int IsContinue = 1;
while(IsContinue)
{
cout<<"******* 请选择算法 *******"<<endl;
cout<<"******* 1-FCFS *******"<<endl;
cout<<"******* 2-SSTF *******"<<endl;
cout<<"******* 3-SCAN *******"<<endl;
cout<<"******* 4-循环SCAN *******"<<endl;
cout<<"chooseAlgorithm = ";
cin>>chooseAlgorithm;
switch(chooseAlgorithm)
{
case 1:
FCFS();break;
case 2:
SSTF();break;
case 3:
SCAN();break;
case 4:
ImprovedSCAN();break;
default:
cout<<"******* 警告:请输入正确的选择! *******"<<endl;break;
}
cout<<"******* 是否继续选择算法? *******"<<endl;
cout<<"******* 0代表退出 ******* "<<endl;
cout<<"******* 1代表继续 ******* "<<endl;
cout<<"IsContinue = ";
cin>>IsContinue;
}
cout<<"****************结束******************"<<endl;
return 0;
}














 978
978











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









