









利用相机视觉定位,并用机械手抓取。
一、相机固定的情况
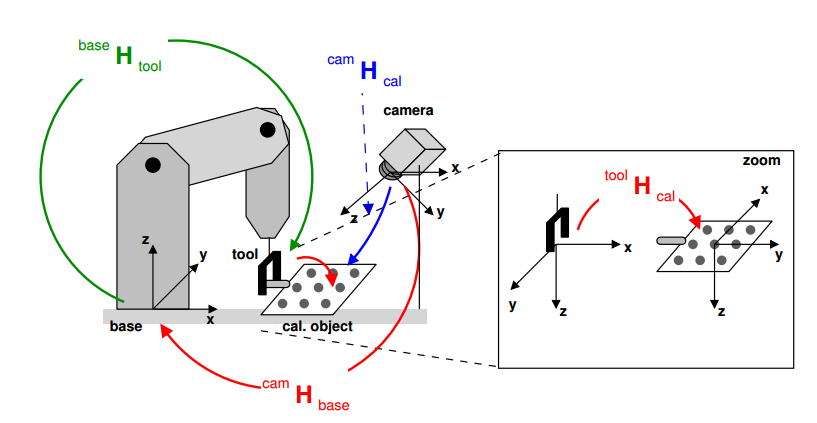
我们需要的最终结果,即 得到base 与 cam 的空间位置关系,即一个4*4的变换矩阵。这个可以通过移动tool,多次拍摄标定板来计算得到。
矩阵关系:

通过多次拍摄标定板,可得到每次标定板在相机坐标系中的位置关系,即 cam_H_cal。
每次的tool在base中的位置也可得知,即base_H_tool。
如拍摄20次,通过20组矩阵方程,通过计算可获得另外两个矩阵。cam_H_base 即 base在cam坐标系下的位置关系。
tool_H_cal 标定板在tool下的位置关系。
这样,cam_H_base的逆矩阵,base_H_cam,即:cam坐标系在base下的位置关系。
抓取过程:
通过拍摄产品获得图像,计算获得产品在cam坐标系下的关系 cam_H_p。
可以通过标定板,建立一个参考位置, cam_H_ref。 然后,得到 产品在ref下的位置(产品和ref在同一个平面),
通过图像坐标转到ref平面 。 ref_H_p。
矩阵相乘,得到cam_H_p。 base_H_cam左乘它,得到 base_H_p ,即产品在base下的位置。
抓取如果加了抓取爪子或吸盘之类,偏tool坐标系原点,需要得到tool_H_gripper 一般就z分量有个偏移。
base_H_tool=base_H_p * gripper_H_tool。 tool移到这个位置就可以抓取了。
二,相机固定在机械手tool上
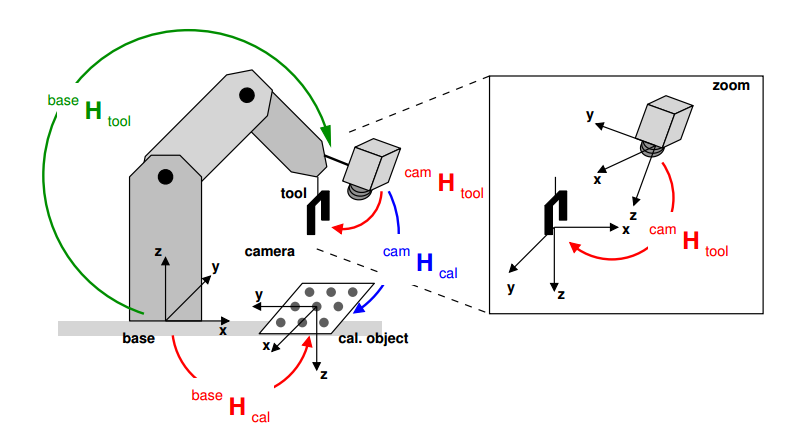
同理: 相机与tool位置关系固定,即是我们要求解的关系 cam_H_tool















 807
807











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









