







上一节讲到如何进行点云分割得到自己所需要的点云,这一节刀哥带你们去对点云进行三维重建和测量三维模型。
话不多说,我们来发车吧!
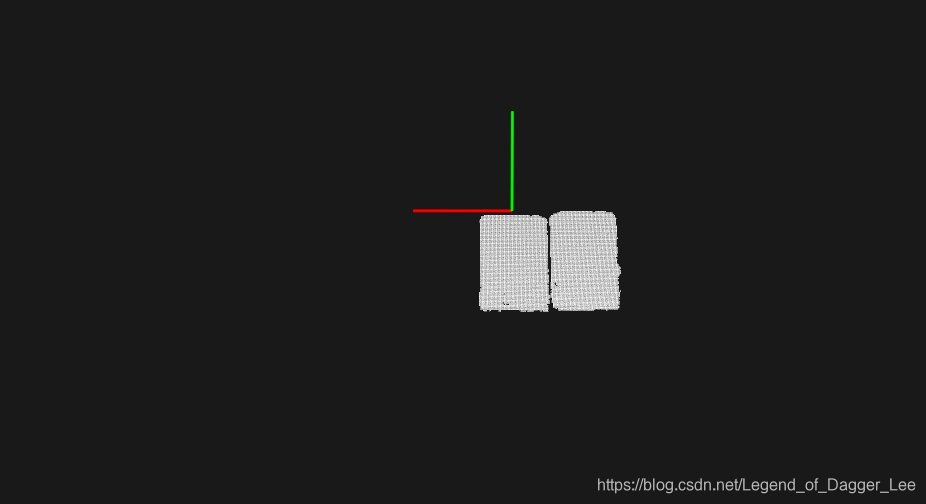
上一节我们将完好的挡书板点云分割出来了,然后使用统计滤波对其进行离散点的滤除,这样一来我们就得到了一块完整的点云模型了。那我们就先把点云模型祭出来吧。
接下来就是怎么对模型进行表面重建,最简单的方法就是贪婪投影三角化算法对有向点云进行三角化的成像,这个计算量不是很大,而且方法简单被普遍使用。它的做法是先将有向点云投影到某一局部二维坐标平面内,然后在坐标平面内进行平面内的三角化,最后根据平面内三位点的拓扑连接关系获得一个三角网格曲面模型。算法比较简单,但是建的模型不是很美观,我们来看一下吧!
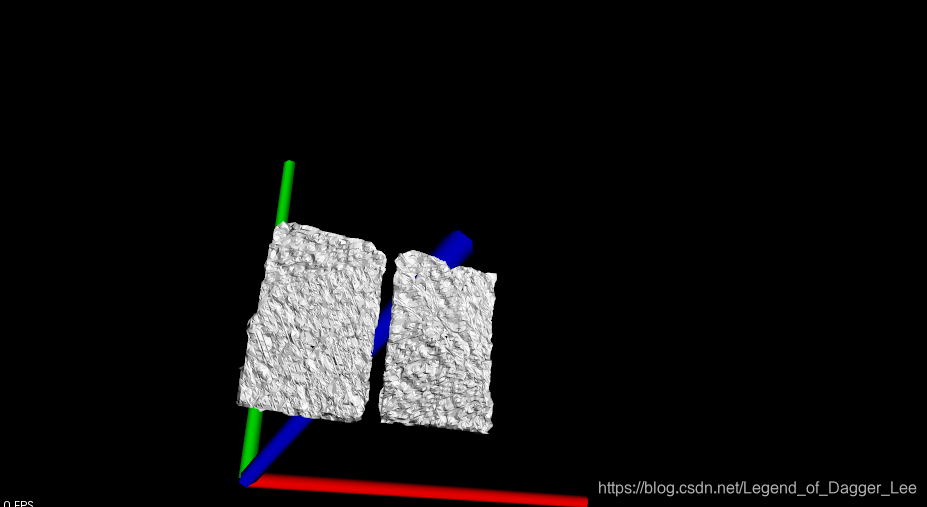
可以看出,在这个表面花丛间的时候
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









