







ros教程:创建工作空间
前言
使用catkin创建一个工作空间
一、工作空间?
在ROS系统下,我们所有的项目都放在一个工作空间下,我们在工作空间下建立不同的功能包来实现不同的功能。这些功能包可以是你自己写的,也可以是你移植其他人的。
二、创建一个工作空间
1.创建目录
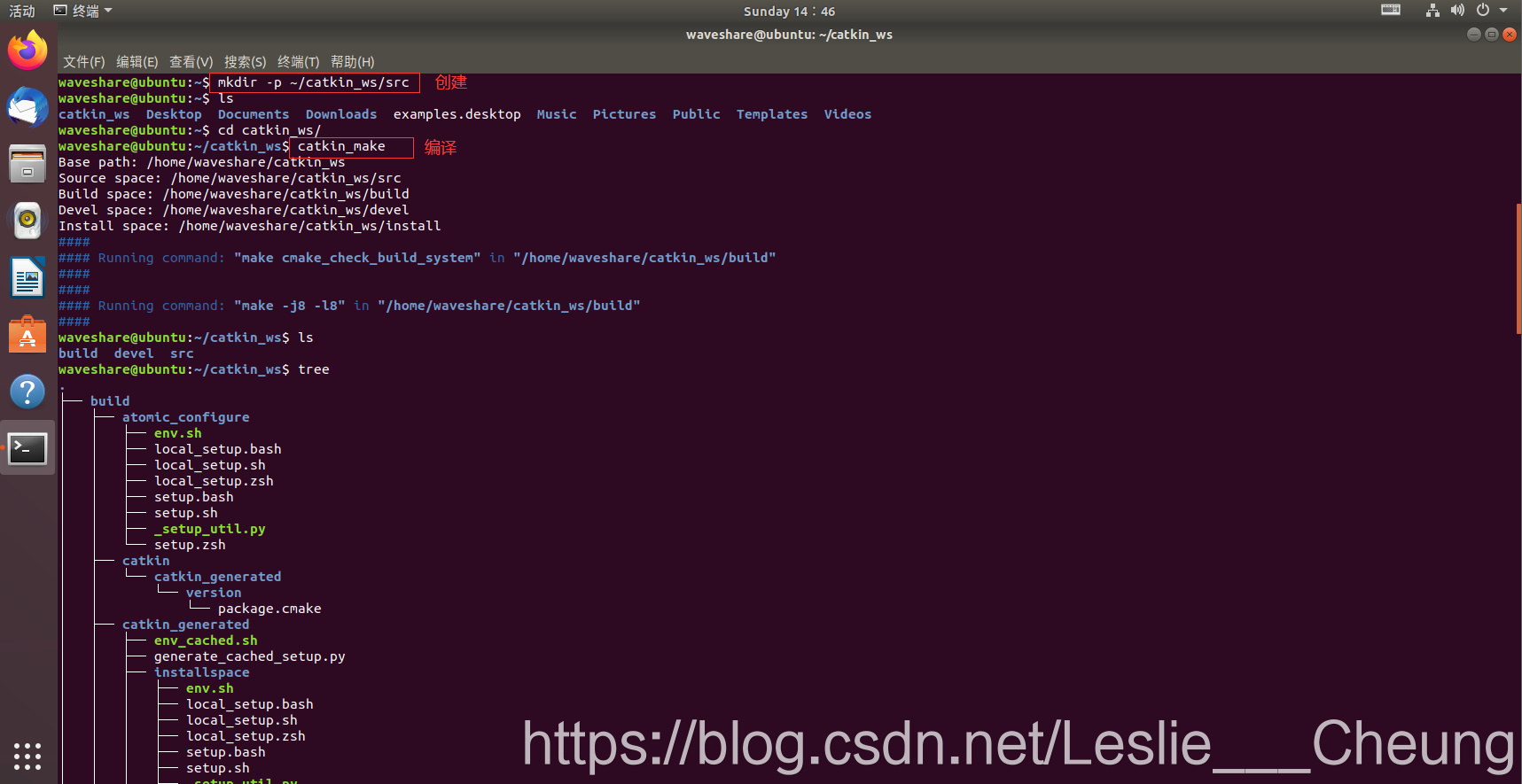
我们需要创建一个工作空间目录,并进入到这个工作空间下。我的工作空间名字叫 catkin_ws(跟着ros官网的例子创建的)。打开终端执行以下代码。:
mkdir ‐p ~/catkin_ws/src
cd catkin_ws
2.编译
在进入工作空间后,我们需要先对工作空间进行编译。指令如下。
catkin_make
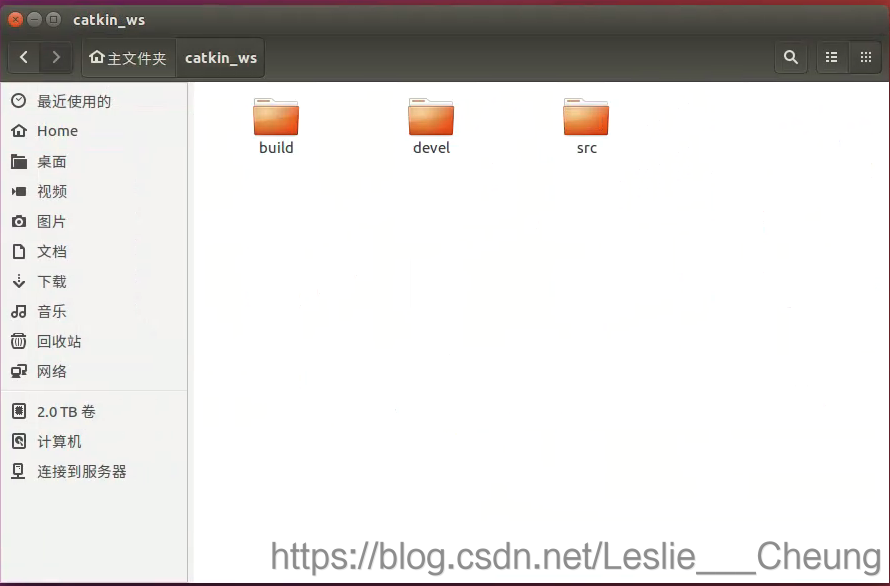
编译成功后的catkin_ws文件夹内,会出现build和devel文件夹,这个是编译生成的。src文件夹内放的是各个功能包,build文件夹内放的是编译项,devel则是编译输出项。
此时我们需要把当前工作空间的一个环境变量添加到我们的系统当中。这个文件在devel下面的setup.bash,为了一劳永逸的解决这个这个问题,我们还是在~/.bashrc终端配置文件下添加该内容。
source /home/username/catkin_ws/devel/setup.bash
可以使用gedit ~/.bashrc打开文件,然后将上面这句代码贴至最底部


在这里我们可以看到,ros系统的环境和catkin_ws工作空间的环境,都已经生效。我们 的工作空间创建到此结束。
















 729
729











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









